
Fターム[2B043DB25]の内容
農業機械一般(操向) (6,001) | 操舵装置の構成、配置又は取付け (462) | 車体の屈曲による操舵機構 (2) | 牽引作業機の操舵機構 (2)
Fターム[2B043DB25]に分類される特許
1 - 2 / 2
作業機の操舵装置および操舵装置用プログラム
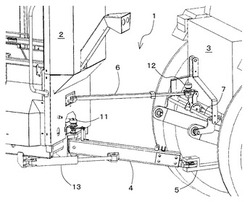
【課題】 ステアリング機構を有しない作業機であっても、トラクタの旋回時には自動的かつ確実に作業機を外向させることができ、トラクタが旋回状態から直進状態へ戻る場合には、作業機を素早くトラクタの後方へと追従させ進行方向を一致させることができる作業機の操舵装置および操舵装置用プログラムを提供する。
【解決手段】 トラクタ3の操作によって変化する数値に基づいて当該トラクタ3の旋回状況を検知する旋回状況検知手段15が旋回開始を検知すると、ヒッチ角度増減手段13を制御して作業機2がトラクタ3の旋回方向に対して外向するようにヒッチ角度を増減し、旋回状況検知手段15が旋回終了を検知すると、ヒッチ角度増減手段13を制御してヒッチ角度が基準オフセット値となるように増減させる。
(もっと読む)
根菜類収穫機の根菜類列検知装置

【課題】 センサの調整条件を極力減らせる簡易な構造にすることで茎葉等の夾雑物の絡まりを防止するとともに、畝からの接地負荷に対する追従性を高めることにより、根菜類列の検知精度を高めることができる根菜類収穫機の根菜類列検知装置を提供する。
【解決手段】 接触アーム3は、畝から受ける上方向の押圧力を吸収し得る弾性力を備えているとともに、所定の下向傾斜角で左右の内側方向に延設された接触先端部32と、この接触先端部32から左右の外側方向に湾出された湾曲部31とを有しており、接触先端部32が根菜類の頭側部に当接した場合、その当接力により湾曲部31を左右の外側方向に回動させてその回動変位を変位センサ5Aに伝達し、接触先端部32が畝に接触して下方から押圧された場合、その押圧力を湾曲部31の弾性力によって吸収して変位センサ5Aに伝達しないように構成されている。
(もっと読む)
1 - 2 / 2
[ Back to top ]