
Fターム[2C014DD03]の内容
Fターム[2C014DD03]に分類される特許
1 - 2 / 2
誘導装置および誘導システム
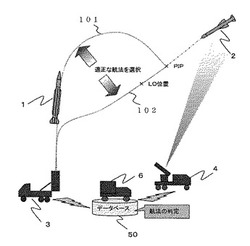
【課題】従来のシステムでは、目標の予測経路に対し側方から予想会合点(以下、PIP)へ接近する経路を取ることで、初中期誘導中に生ずる、PIPが目標の速度変化で変動することに伴う進路修正による速度損失を防止する航法を提供する。
【解決手段】誘導装置内に、予めシミュレーションで求めた高速で移動する目標の対処時の情報(各PIPにおける飛しょう体の速度等)が格納されたデータベースを持つ。誘導装置では、このデータベースを用い、計算で算出されたPIPに応じて飛しょう体の速度損失が少なく旋回性能が優れている航法(従来航法で対処またはカウンタパラレル航法)を選択することができる。
(もっと読む)
飛しょう体の誘導方法及び誘導計算装置

【課題】終末誘導で比例航法により飛しょう体を目標に向けて誘導する段階において、目標が高速で移動する飛しょう体であっても、会合時にIHEをほぼゼロとすることが可能な飛しょう体の誘導方法を提供する。
【解決手段】射撃管制装置4において理想的なヘッドオン状態となるような飛しょう経路を算出する際に、各ポイントごとに会合角にオフセット量を含ませた最適飛しょう経路計算を行うようにする。具体的には、射撃管制装置4は高速目標対処時の飛しょう経路計算用のオフセット量をデータベース41として保有し、データベース41に格納されたオフセット量を用いてオフセットした目標会合角で目標と会合する飛しょう経路を算出する。
(もっと読む)
1 - 2 / 2
[ Back to top ]