
Fターム[2F062DD06]の内容
機械的手段の使用による測定装置 (14,257) | 補正、補償、較正、調整 (452) | 補正、補償 (168) | フィーラ半径 (4)
Fターム[2F062DD06]に分類される特許
1 - 4 / 4
3次元表面形状算出装置およびそれを用いた自動施工装置ならびにその方法
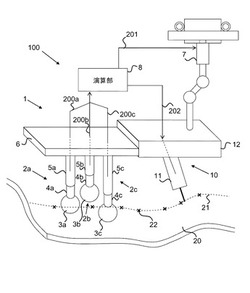
【課題】1回の走査で精度よく測定対象表面の3次元表面形状を算出することができる3次元表面形状算出装置を提供する。
【解決手段】3次元表面形状算出装置1は、センサ基台6と、先端に球形状を1方向に移動できる変位センサ2と、原点を定めた3次元空間で平面方程式算出点22を囲む3点の接触点に変位センサ2を接触させてセンサ基台6を移動させる演算部8とを備え、演算部8は、センサ球2の移動距離である変位信号200およびセンサ基台6の原点からの方向ならびに距離を用いて3点の球中心座標を求め、1点の球中心座標から他の2点の球中心座標へ向かう2つのベクトルの外積である法線ベクトルの単位ベクトルに球形状の半径を乗したベクトルを求め、このベクトルを球中心座標に加えて接触点の座標を求め、この接触点の座標が囲む平面方程式を算出する。
(もっと読む)
形状測定方法

【課題】プローブ径補正誤差を低減し高精度に形状評価を行うことができる形状測定装置を提供する。
【解決手段】測定データに含まれるプローブ径に起因する誤差を、第1の設計データを用いてプローブ径補正を行うことで算出した補正データと第1の設計データの差分を形状誤差データとして算出し、前記形状誤差データをg(X,Y)の形式で表現できる形状誤差関数として近似した後に、前記第1の設計データと前記形状誤差近似関数g(X,Y)の和で表現される第2の設計データを算出し、前記第2の設計データを用いて測定データに含まれるプローブ径に起因する誤差を補正することで補正データを算出し、前記補正データを前記第1の設計データに最も近づける座標変換量を算出し、その座標変換量を用いて前記補正データを座標変換した後に、前記座標変換後の補正データと第1の設計データとの差分を求め形状誤差を算出する。
(もっと読む)
形状測定装置、形状測定方法及び形状測定プログラム
【課題】接触子の形状が理想的な球ではない場合であっても、測定点を正確に算出可能な形状測定装置、その形状測定方法並びに形状測定プログラムを提供する。
【解決手段】前記接触子の前記被測定物への複数箇所での接触時における前記接触子の基準点の位置座標を擬似測定点として取得する擬似測定点取得部212と、前記擬似測定点から前記擬似測定点に沿った面又は線を推定し、該面又は線に対する各擬似測定点からの法線ベクトルを算出する法線ベクトル生成部213と、前記接触子の表面形状を特定する接触子モデルの基準点を前記擬似測定点に一致させると共に測定時の前記接触子と前記接触子モデルとの姿勢を一致させて前記接触子モデルを配置する接触子モデル配置部と214、前記各法線ベクトルが前記各配置された接触子モデルの表面と交わる点を測定点として算出する測定点算出部215とを備える。
(もっと読む)
触針式形状測定装置
【課題】触針式形状測定装置において、触針と被測定面の接触位置を算出することによって被測定面の形状を高精度に測定する。
【解決手段】最初にクランプ13で触針14をアーム15に固定した状態で被測定面を走査し、走査によって変位検出機構16で得られたZ方向の変位データを測定する。次に、触針14がアーム15に対してクランプ13による接続部分を中心にXY平面に可動となるようにクランプ13を切り替え、触針14が走査した線上において、先端球10を被測定面に接触させ、その位置からZ方向に微小な変位を加えた場合のX、Y及びZ方向の変位を測定し、先端球10と被測定面との接触位置を測定する。これらZ方向の変位データ及び先端球10と被測定面との接触位置データに基づいて走査線上における被測定面の形状を計算する。
(もっと読む)
1 - 4 / 4
[ Back to top ]