
Fターム[2F062MM21]の内容
機械的手段の使用による測定装置 (14,257) | 測定の前処理 (721) | 清掃 (3)
Fターム[2F062MM21]に分類される特許
1 - 3 / 3
三次元測定装置及び該装置を用いた測定方法
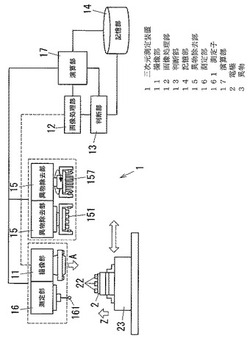
【課題】測定精度を低下させることなく測定時間を短縮した三次元測定装置及び該測定装置を用いた測定方法を提供する。
【解決手段】本発明の三次元測定装置1は、被測定物を撮像する撮像手段と、撮像結果から被測定物に付着した異物3の有無を検知する異物検知手段と、被測定物に測定子161を接触させて測定する測定手段と、検知された異物3を低減・除去する異物除去手段と、を備えている。そして、異物3検知時には測定手段での測定前に異物除去手段で異物3を除去・低減するものである。これにより、異物3の検知時間を短縮できて、全体の測定時間を短縮することができ、且つ測定子161を用いて測定するため被測定物を正確に測定することができる。
(もっと読む)
計測装置

【課題】、オイルミストや塵などの付着から装置を保護して測定精度の劣化を防止し、加工機械のそばでも測定が行える計測装置を提供すること。
【解決手段】被検物Mの形状を測定する計測装置であって、前記被検物Mの形状情報を採取する検出手段(形状センサ20、投影ユニット21、撮像ユニット22)と、前記計測部の周囲に気体流を形成する気体流形成手段(エアーポンプ30、エアーホース31、エアーダクト21d、22c)と、を備える。
(もっと読む)
ロボットおよびその表面計測方法
【課題】ロボットハンドに付着した汚れを効率的かつ確実に検出して、汚れによる作業対象物の汚染や破損、および落下を防いで作業対象物を安全に把持することができるロボットを提供する。
【解決手段】作業対象物に対する接触部3aの接触状態を計測する計測装置4を有する複数の把持部3と、計測装置4で計測した接触状態の情報を分析して汚れを検出する汚れ検出装置5とを備え、汚れ検出装置5において、複数の把持部3同士を接触させて相対運動させる際の接触状態の変化により、把持部3の汚れを検出する。これにより、新たに外部の汚れ検出センサを搭載したり、検出ポジションを設けて移動したりすることなく、把持部3の汚れを効率的かつ確実に検出できる。
(もっと読む)
1 - 3 / 3
[ Back to top ]