
Fターム[3C042RG14]の内容
多工程加工の機械及びシステム (754) | 工具の取扱い (18) | 工具搬送 (2)
Fターム[3C042RG14]に分類される特許
1 - 2 / 2
生産装置
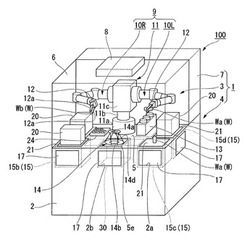
【課題】生産装置において、装置内で複数のワークに対して、例えば、加工、計測、調整、組立等の種々の作業を行うことができ、装置単体で多種多様な製品の生産が可能となるようにする。
【解決手段】ワークWに対して作業を行う生産装置100であって、箱状の装置本体1と、装置本体1を下側の作業準備室4と、上側の作業室3とに仕切る平板状の床部5と、作業室3を床部5上で外部から隔離するクリーンカバー6と、作業準備室4の内部から床部5の位置まで昇降可能なユニット固定部21と、作業準備室4内に設けられ、ユニット固定部21を昇降させる昇降機構と、作業室3内に設けられ、作業室3内でワークWを含む被移動物を移動させる多関節ロボット10R、10Lを有するマニピュレータ9とを備える。
(もっと読む)
多面加工機およびワーク位置決め装置

【課題】ワークの加工をいくつかの側面から、被加工面間の相互の寸法精度を高精度で行えるようにするための位置決め装置を備えた多面加工機を提供する。
【解決手段】本発明は、ワーク(40,40’)を加工するための少なくとも2つの加工装置(3,4,55)と、ワーク(40,40’)を締付けるための締付装置(19,19A,19B)を有する少なくとも1つの位置決め装置(7,7B〜7F)とを備えた、ワーク(40,40’)のいくつかの表面または側面を加工するための多面加工機(1,45,50)に関する。本発明によると、位置決め装置(7,7B〜7F)は、締付けたワーク(40,40’)を少なくとも2つの加工ユニット(3,4,55)の加工位置間で移動できる移動装置(15,15B,15C;16)上に配置され、さらに締付装置(19,19A,19B)を縦軸(A)および/または横軸(B)を中心に回転または枢動することができる。
(もっと読む)
1 - 2 / 2
[ Back to top ]