
Fターム[3C269EF38]の内容
数値制御 (19,287) | プログラムの作成、管理 (3,117) | プログラムの内容 (1,894) | 汎用言語による記述 (5)
Fターム[3C269EF38]に分類される特許
1 - 5 / 5
ロボットの角度データ変換方法及びこの方法を実施するための制御装置
【課題】ロボット交換時におけるデータ設定の誤りを防ぐ。
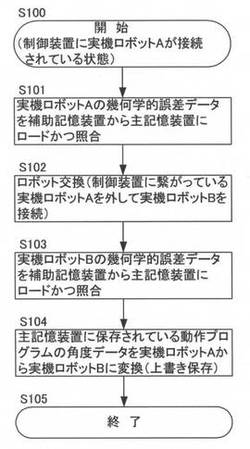
【解決手段】交換前のロボットが制御装置に接続された状態で、補助記憶装置に記憶された交換前ロボットの幾何学的誤差データを制御装置の主記憶装置にロードし、かつ幾何学的誤差データに付記されたID情報と交換前ロボットのID情報とを照合し(S101)、次にロボットを制御装置から外して交換し(S102)、交換後ロボットが制御装置に接続された状態で、補助記憶装置に記憶された交換後ロボットの幾何学的誤差データを主記憶装置にロードし、かつ幾何学的誤差データに付記されたID情報と交換後ロボットのID情報とを照合し(S103)、交換前及び交換後のロボットの幾何学的誤差データを反映したツール先端位置間の誤差が十分小さくなるように動作プログラムに含まれる角度データを変換し、変換された角度データを含むように動作プログラムを上書き保存する(S104)、工程を備える。
(もっと読む)
不確定性図形文プログラムを含む図形並びに形状を処理する2次元形状又は、3次元形状を処理する汎用2次元形状又は、3次元自動設計製造システム

【課題】 2次元立体・3次元曲面・手描き図面・ポンチ絵・CADデータなど総てのものづくり入力媒体から、出力として国際規格ISO準拠のNC工作機械用NC加工データ作成が自作出来るシステムを提供する。
【解決手段】 手描き図・ポンチ絵・2次元形状又は、3次元形状全ての入力媒体の幾何要素を等価変換でベクトル値置換の中間言語プログラム文を作成する。この中間言語プログラムが自作ポストプロセッサーとパラメトリック処理を行う汎用自動設計製造システムが加工データ作成を行う。
(もっと読む)
ロボット教示システム
【課題】ワークが替わるたびにプログラムを新たに作り直す必要がなく、ロボットの教示作業に必要な時間を短縮することができるロボット教示システムを提供する。
【解決手段】ロボット教示システム10は、ロボット11と、ロボットコントローラ12と、ロボット11に取付自在のツール13と、ロボットコントローラ12を制御する制御部20とを備えている。制御部20は、ワーク固有データ30が入力される入力部21と、ロボット11の種類およびツール13の種類を指定する作業指定部22と、作業指定部22からの情報に基づいてロボット制御用中間言語31を作成する中間言語作成部23とを有している。最終言語作成部24において、ワーク固有データ30とロボット制御用中間言語31とに基づいてロボット制御用最終言語32が作成され、出力部25を介してロボットコントローラ12へ送られる。
(もっと読む)
素材形状表現装置、素材形状表現方法、プログラム、データ構造
【課題】加工シミュレーションにおいて精度を維持しつつ十分な処理速度を実現できる素材形状表現装置を提供する。
【解決手段】素材形状を包含する三次元空間のXY平面を第1のセル51に分割し、第1のセル51を第2のセル53に分割し、第1のセル51ごとにZ方向の階層群59を生成し、階層群59の基準Z値情報65と、階層ごとの二値情報61とを用いて、第2のセル53ごとに定まるZ値情報55を表現する。特に、敷詰型の場合、階層群59の基準Z値情報65と、階層群59に含まれる全ての階層の二値情報61とを用いる。一方、圧縮型の場合、階層群59の基準Z値情報65と、Z値情報55の境界が少なくとも一つ含まれる階層かどうかを示す階層情報63と、Z値情報55の境界が少なくとも一つ含まれる階層のみの二値情報61とを用いる。
(もっと読む)
非線形工程計画の生成方法及びそれを利用したインターネット基盤のSTEP−NCシステム
【解決手段】本発明は、非線形工程計画の生成方法及びそれを利用したインターネット基盤のSTEP−NCシステムに係り、より詳細には、現場状況を反映した多様な代案工程と加工順序情報とを含む非線形工程計画を樹立することで最適の加工を遂行しながら、異常状態に自律的に対処できる非線形工程計画を生成させる方法と、樹立された工程計画からXML形式のSTEP−NCパートプログラムを作成することでインターネットを経由して他のシステムと容易に工程情報を交換できるインターネット基盤のSTEP−NCシステムに関する。 (もっと読む)
1 - 5 / 5
[ Back to top ]