
Fターム[3F204EA08]の内容
クレーンの細部(制御、安全) (2,955) | 振れ止め制御 (100) | 速度パターン (20) | 曲線状 (2)
Fターム[3F204EA08]に分類される特許
1 - 2 / 2
共吊クレーンの協調搬送制御装置及び共吊クレーンの協調搬送制御方法
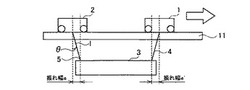
【課題】複数のクレーンの動作を制御し複数のクレーンにより単一の搬送物を吊り下げて搬送する共吊クレーンの協調搬送制御装置において、作業者のミス等により搬送が失敗する虞れなく、動作指令の生成を容易とし操作の効率を向上させ、搬送物の揺れを抑えるとともに、並進運動のみならず回転運動をも行なうクレーンを用いる場合にも適用できるようにする。
【解決手段】複数のクレーン1,2のうちの一は、作業者の操作によって動作するリーダクレーン1であり、他のクレーンは、制御装置により制御されて動作するフォロワクレーン2である。制御装置は、フォロワクレーン2における搬送物3の振れ幅に基づいてフォロワクレーン2のリーダクレーン1に対する距離偏差を推定し、推定された距離偏差をなくすようにフォロワクレーン2ヘの動作指令を生成する。この動作指令によりフォロワクレーン2を動作させてリーダクレーン1の動作に追従させる。
(もっと読む)
吊荷の振れ特性算出装置及びその方法

【課題】 技術者の読み取り作業を不要とし、信頼性の高い振れ特性を取得すること。
【解決手段】 吊りロープによりトロリに吊り下げられた吊荷の振れ特性を算出する吊荷の振れ特性算出装置であって、トロリを駆動させるための指令を生成する駆動指令生成部12と、この駆動指令に基づいてトロリを駆動させるための駆動信号を生成する信号出力部13と、駆動信号に基づいてトロリを駆動する駆動装置と、トロリが駆動されることにより振れが生じた吊荷の振れの変位を所定の時間間隔でサンプリングするサンプリング部14と、サンプリングの結果を用いて、吊荷の振れ状態を推定するとともに、推定した吊荷の振れ状態に基づいて、吊荷の振れ特性を算出する振れ特性推定部15とを具備する吊荷の振れ特性算出装置を提供する。
(もっと読む)
1 - 2 / 2
[ Back to top ]