
Fターム[5C122HA88]の内容
Fターム[5C122HA88]に分類される特許
1 - 20 / 5,258
画像処理装置および画像処理方法、プログラム
画像処理装置、および画像処理方法、並びにプログラム
情報処理端末、情報処理方法、およびプログラム
撮影画像のリニアリティ評価方法、画像取得方法及び画像取得装置
撮像装置
画像処理装置
情報処理装置及び方法、並びにプログラム
機器
撮像装置、情報処理装置及びその制御方法、プログラム、並びに音声処理装置
撮像装置
撮像装置及び撮像装置の制御方法
撮像装置およびその制御方法
カメラシステム
撮像装置のシェーディング補正方法、及び撮像装置
撮像装置
画像処理装置、撮像装置及び画像処理プログラム
撮像装置及び視点検出装置
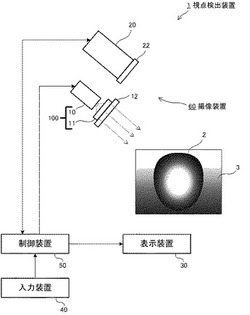
【課題】視点を良好な精度で検出するための画像を取得できる撮像装置及びこれを備える視点検出装置を提供する。
【解決手段】撮像装置60は、視点検出のために用いられる撮像装置であって、人物である被写体2を撮像し、撮像画像を取得する撮像部20と、被写体2に向けて光を射出する光源10と、光源10の光の射出側に配置され、光源10からの光を平行光として被写体2に射出する平行光束光学系11と、を備え、撮像部20の撮像光軸と前記平行光の射出方向とが実質的に平行である。
(もっと読む)
情報処理装置、情報処理装置の制御方法、およびプログラム

【課題】センサ校正に関する知識やノウハウのない作業者であっても、センサ校正用入力データを容易に取得し、精度よく校正を行うための校正用入力データであるか否かを容易に判断できるようにする。
【解決手段】撮像装置に対する位置姿勢センサの位置または姿勢を校正するための校正用入力データを処理する情報処理装置であって、撮像装置により撮像された画像を取得する画像取得部と、画像から指標情報を検出する指標検出部と、位置姿勢センサにより計測された位置姿勢センサ自身の位置または姿勢の計測値を取得する計測値取得部と、指標情報と計測値とを含む校正用入力データの推奨レベルを、指標情報と計測値とに基づいて算出する算出部と、推奨レベルを提示する提示部と、を備える。
(もっと読む)
車載カメラシステム及びその較正方法、及びその較正プログラム
【課題】撮像部の 内部パラメータと外部パラメータを容易に較正できる車載カメラシステムの較正方法を得ること。
【解決手段】車載カメラシステム1の較正方法は、撮像部307〜310により撮像された画像から予め設定された直線部分を有する認識対象物を認識し、画像から認識対象物の特徴点を抽出し、その特徴点を仮想球面に投影して仮想球面601に形成された特徴点列の形状に基づいて撮像部307〜310の内部パラメータを推定し、推定した内部パラメータを較正するとともに、特徴点に基づいて画像の俯瞰視点を算出し、その算出した俯瞰視点に基づいて撮像部307〜310の外部パラメータを推定し、その推定した外部パラメータを較正することを特徴としている。
(もっと読む)
画像処理装置、および画像処理方法、並びにプログラム
【課題】撮影画像に含まれるノイズの低減処理を行う装置、方法を提供する。
【解決手段】撮像装置の撮影画像の区分領域である局所領域単位の特徴量を算出し、算出した特徴量から構成される画像確率モデルであり、各ノイズ無し画素値の発生確率を示す画像確率モデルを生成する画像確率モデル生成部と、撮像素子対応のノイズ特性情報から生成されるノイズ確率モデルであり、あるノイズ無し画素値が発生した場合に、あるノイズ有り画素値が発生する条件付き確率を示すノイズ確率モデルを格納したメモリと、画像確率モデルと、ノイズ確率モデルを適用したベイズ推定処理により、撮影画像のノイズを低減したノイズ低減画像を生成する。
(もっと読む)
1 - 20 / 5,258
[ Back to top ]