
Fターム[5D088NN17]の内容
トラック変更、選択のためのヘッド移動 (342) | ヘッド移動速度制御 (152) | 発明、考案の目的、特徴 (62) | 振動対策、トラック偏心対策 (10)
Fターム[5D088NN17]に分類される特許
1 - 10 / 10
情報記憶装置
【課題】精度の高いヘッドの位置決めを短時間で行うことができる情報記憶装置を提供する。
【解決手段】所定規則によって配列された複数の制御マークが記録されているディスク状の記録媒体と、記録媒体を回転させる媒体駆動部と、記録媒体の表面に接触あるいは近接して記録媒体に対し情報再生およびまたは情報記録、制御マークの検知を行うヘッドと、ヘッドを保持し記録媒体の回転中心に対して接近乖離する方向に移動させるヘッド駆動部と、ヘッド駆動部に対して駆動力を制御する駆動力制御部と、媒体駆動部による記録媒体の回転に伴った、ヘッドによる複数の制御マークの検知間隔を時間の単位として用いてヘッド駆動部に対して駆動時間を制御する駆動時間制御部と、制御マークの規則に基づいた理想的間隔と制御マークの実際の間隔との差を入手し、その差に基づいて、駆動力制御部による駆動力の制御を修正する駆動力修正部とを備えた。
(もっと読む)
車載用磁気ディスク装置、車載用磁気ディスク装置の制御方法

【課題】 この発明は、車両等の移動体に搭載されるHDD装置から発生する音を低減させることを目的としている。
【解決手段】 磁気ディスク(12)からリードされたデータを記録可能な不揮発性メモリ(22)と、車両の速度を受信する手段(20)と、受信した車両の速度を予め設定された第1の値または第2の値と比較する手段(20)と、比較された車両の速度が第1の値より大きいか、第1の値より小さく第2の値より大きいか、第2の値より小さいかを判別する手段(20)を備え、比較された車両の速度が第1の値より大きいと判別された場合は第1のヘッド移動速度(シーク速度)で磁気ディスクからデータを読み出し、第1の値より小さく第2の値より大きいと判別された場合は第2のヘッド移動速度(シーク速度)で磁気ディスクからデータを読み出し、読み出されたデータを不揮発性メモリ(22)に記録するように制御する。
(もっと読む)
二自由度位置制御方法、二自由度位置制御装置および媒体記憶装置
【課題】二自由度制御を行う現在オブザーバ制御による位置制御装置において、固定小数点のプロセッサを用いて、計算精度を向上する。
【解決手段】オブザーバを使用した二自由度制御系(26)の入力である目標位置軌道、位置誤差を基準軌道を基準とした相対値とし、オブザーバの状態変数が、基準位置からの相対的な距離を保持するようにした。絶対的な距離を保持する場合に比べて,値の変化する範囲が小さくなり、固定小数点方式でも、小数点の有効桁数を増加でき、計算精度が改善できる。このため、加速区間における制御電流が滑らかになり、共振や騒音の発生を防止でき、定速区間や減速区間では、残留振動の発生を防止でき、シーク時間を短縮できる。
(もっと読む)
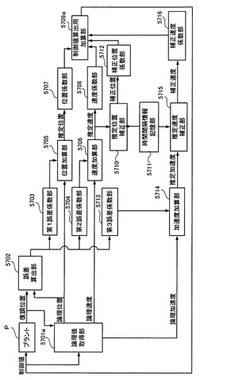
制御装置、記憶装置、記憶媒体、サーボ情報復調プログラム及びサーボ情報復調方法
【課題】記憶装置において、復調速度の回転同期成分の誤差を補正し、補正された復調速度を使用してヘッドの移動速度の正確なフィードバック制御を行うことを可能とする。
【解決手段】本発明の磁気ディスク装置300の位置及び速度復調回路100は、同一セクタ内のサーボ情報であるEven1及びEven2のサーボ信号の位相差に基づいて磁気ヘッドの移動速度を復調する差分算出部105と、差分算出部105により算出された復調移動速度のオーバーフローを検出して該オーバーフローの補正値を計算するオーバーフロー検出部108とを備え、オーバーフロー検出部108により検出されたオーバーフローを補正値に基づいて補正し、該復調速度の回転同期成分の誤差の補正値でさらに補正してより正確な復調速度を出力する構成を取ることによって、ヘッドの高速シーク時においてもより正確な復調移動速度を得ることを可能とした。
(もっと読む)
磁気ディスク装置およびヘッド位置決め制御方法
【課題】目標速度に対するモデル速度の追従性を向上させることができるともに、制御指令の加速から減速への切替えを滑らかにして機械共振の励起を抑制すること。
【解決手段】磁気ディスク装置において、ヘッド位置決め制御系に、ヘッドの目標位置と前記ヘッドの実際の位置の誤差に基づいてフィードバック制御を行う位置誤差フィードバック制御系260と、予め定められた制御数式モデルによって、制御指令uと位置誤差フィードバック制御系260に対して目標位置の指令として出力するモデル位置とヘッドの目標速度に追従させるためのモデル速度とを求める制御系であってヘッドの目標位置を入力して、モデル位置から目標位置までの残り距離に対応する目標速度の微分値に基づいて制御指令uとモデル位置を求めるモデル制御系250と、を備えた。
(もっと読む)
ディスクドライブのトラックシークサーボを制御する方法、装置および記録媒体と、これを用いたディスクドライブ
【課題】ディスクドライブのトラックシークサーボを制御する方法、装置および記録媒体を提供する。
【解決手段】ディスクドライブを制御する方法において、トラックシークモードで加速区間と減速区間とが対称性を有する変形されたPTOS(Proximate-Time Optimal Servo)速度軌跡を生成するステップと、変形されたPTOS速度軌跡を適用してヘッドの動作を制御するステップと、を含む。かかる方法によれば、PTOS速度軌跡が加速区間と減速区間とで対称性を有するように変形され、当該軌跡を用いてヘッドの動作が制御されるので、急激な電流変化が抑制され、速度軌跡の生成に要する計算時間が短縮される。
(もっと読む)
磁気ディスク装置
【課題】磁気ディスク装置において、機構共振をモデル化した簡単なフィードフォワード制御により高速高精度なシーク動作を行わせること。
【解決手段】磁気ディスク装置は、磁気ディスク、磁気ヘッド、磁気ヘッドを支持して位置決めするヘッドアクチュエータ、磁気ヘッドが所定位置にあるように制御する制御装置を備える。制御装置は、ヘッド位置信号を生成する手段と、磁気ヘッドの目標位置までの目標位置軌道101を生成する手段と、目標位置軌道101からヘッドアクチュエータの近似逆モデル105Aを用いてフィードフォワード制御入力を生成する手段とを有する。フィードフォワード制御入力を生成する手段は、ヘッドアクチュエータの近似逆モデル105Aに共振逆モデル1を追加してヘッドアクチュエータの機構系の共振を含む周波数帯までモデル化している。
(もっと読む)
振動を抑制したヘッドシーク制御方法、及び回転記録再生装置
【課題】 回転記録再生装置のヘッドのシーク制御において、アクチュエータの駆動力を有効に活用しながら、騒音を減少しつつシーク時間を短縮する。
【解決手段】 マイクロプロセッサがヘッドシーク用アクチュエータに与える駆動電流の制御信号の生成に際し、信号生成器91は、アクチュエータの加速時には許容最大加速度を生じる所定の加速度を生成し、減速時には許容最大減速度を与える所定の減速信号を生成し、セトリング時にはゼロレベルのセトリング信号を生成する。そして減速からセトリングへの切り替えは、目標位置に最短時間で到達できるためにセトリングを開始すべき時間としてマイクロプロセッサが計算した時点とする。
(もっと読む)
ハードディスクドライブのトラック探索制御方法,記録媒体,およびハードディスクドライブ
【課題】正弦波の加速度軌跡によるトラック探索制御装置において,利得歪曲及び位相遅延を補償するトラック探索制御方法,記録媒体及び装置を提供する。
【解決手段】正弦波の加速度軌跡による位置y*(n),速度v*(n)及び加速度a*(n)を得るための理想的な正弦波と,利得歪曲及び位相遅延を表す正弦波とを合成し,合成された正弦波,すなわち利得歪曲及び位相遅延を補償するための正弦波によりVCM駆動信号u(n)を発生させることによって,利得歪曲及び位相遅延C(j2πf)を補償するハードディスクドライブのトラック探索制御方法である。
(もっと読む)
磁気ディスク装置及びシーク動作の実行方法
【課題】 磁気ディスク上の潤滑層を平滑化する際の騒音を軽減する。
【解決手段】 磁気ディスク装置は、磁気ヘッドが磁気ディスクに対してデータの読み取り又は書き込みを行うときにボイス・コイル・モータに供給する電流を生成するためのリード/ライト・モード・パラメータ・テーブル85を備える。さらに磁気ディスクに対してデータの読み取り及び書き込みのいずれも行わないときに前記ボイス・コイル・モータに供給する電流を生成するための平滑化モード・パラメータ・テーブル84を備える。CPUは、パラメータ・テーブル85またはパラメータ・テーブル84のいずれか一方を参照してボイス・コイル・モータに供給する電流を制御する。CPUは、潤滑層平滑化イベントが発生したとき、パラメータ・テーブル84を参照してボイス・コイル・モータに供給する電流を生成し、磁気ヘッドを磁気ディスクの最外周トラックと最内周トラックとの間でシークさせて潤滑層の平滑化処理を実行する。
(もっと読む)
1 - 10 / 10
[ Back to top ]