
Fターム[5H004LA20]の内容
フィードバック制御一般 (10,654) | 制御対象の特性 (738) | その他 (7)
Fターム[5H004LA20]に分類される特許
1 - 7 / 7
自動化されたPIDコントローラの設計
本発明の実施形態は、ユーザーが、自由形式モデリング環境においてPIDコントローラなどのコントローラの対話型設計を実行できるようにするための技術、コンピュータ読み取り可能媒体、及び装置を提供する。ユーザーは、コントローラの性能に関連付けるのがユーザーには難しい場合があるコントローラのゲイン値の指定をするのではなく、典型的なユーザーになじみのなる特徴を用いてコントローラを調整することができる。 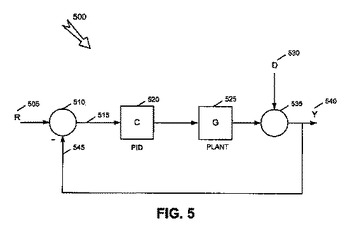 (もっと読む)
(もっと読む)
自律移動ロボットの動作計画装置、方法、プログラム及び記録媒体並びに自律移動ロボットの動作制御装置及び方法

【課題】より安全で、より動作計画が破綻しづらい自律移動ロボットの動作計画を行う。
【解決手段】衝突判定部4が、互いに異なる複数の一時的な流れが生じた場合に、各状態にある上記自律移動ロボットが各行動に基づいて移動した場合に障害物に衝突するかどうかを判定する。衝突確率計算部6が、衝突すると判定された一時的な流れが生じる確率の総和である衝突確率を計算する。報酬決定部7が、衝突確率を考慮して報酬を決定する。動的計画部2が、報酬に基づいて動的計画を行う。
(もっと読む)
二次元型テーブル微小角度駆動機構の制御ループ

【課題】従来の二次元型テーブル微小角度駆動機構の制御ループは、第1〜第4ヒンジの共振が考慮されていないので、第1〜第4ヒンジの共振によって駆動誤差が生じる。
【解決手段】本発明による二次元型テーブル微小角度駆動機構の制御ループは、第2減算部300と第2乗算部400との間に介在され、第1補償乗算部810、第1積分部820、第2補償乗算部830、第2積分部840、及び加算部850から構成される補償演算手段800によって、機構部700の共振周波数ω0とダンピング比ζとを用いた補正角速度偏差850aが生成される構成である。
(もっと読む)
ポンプ台数制御方法及び装置
【課題】急激な水位変動が生じても水位変動に応じて確実に各排水ポンプを運転制御し、通常時のエネルギー消費を低減するポンプ台数制御方法を提供する
【解決手段】水位に応じて複数のポンプの運転台数を制御するポンプ台数制御方法である。水位がいずれかのポンプ7の起動水位まで上昇すると、ポンプ7とこのポンプに回転動力を与える機関4との間の継手5を閉じてポンプ7を起動するとともに、水位の上昇率に基づいて、起動されたポンプ7の次に起動されるポンプ7に回転動力を与える機関4の台数が選択される。そして、この選択された台数の機関4をアイドリング状態とする。このアイドリング状態は、一定時間経過してもポンプ7が起動しない場合、アイドリングを停止する。
(もっと読む)
モデル予測制御装置、プログラム
【課題】制約付きモデル予測制御において制約の緩和回数が増えて実行時間オーバを起こす可能性を低くする。
【解決手段】条件付き最適化計算に用いる制約の復帰処理において、現在の制御量検出値yが特定の制約復帰条件を満たすかどうかを判断し(ステップS21)、満たす場合のみ制約緩和レベルは一段復帰させる(ステップS22)。所定の制約復帰条件を満たさない限り制御量制約の復帰を行わないようにすることで、制約付き最適化計算において解なしとなる可能性を低くし、以って、制約の緩和が再度必要になる可能性を低くできる。これより、計算負荷が大きい制約付き最適化処理の頻度が大きくなることを防止し、実行時間増大を防止できる。
(もっと読む)
制御装置および温度調節器
【課題】制御部が制御する制御対象の特性と制御部が想定する制御対象との特性を一致させることにより、高精度な制御を可能にする。
【解決手段】制御対象を一次遅れ系として制御するPID制御部3と、制御対象2の分布定数系の特性を一次遅れ系の特性に変換する変換部4とを備えており、変換部4では、制御対象2の分布定数系のモデルの逆モデル5によって制御対象2の分布定数系の特性を打ち消す一方、制御対象2の一次遅れ系のモデル6に置き換えており、これによって、PID制御3は、制御対象2、制御対象2の分布定数系のモデルの逆モデル5、および、制御対象2の一次遅れ系のモデル6からなる一次遅れ系の拡大制御対象7を制御する。
(もっと読む)
PIDコントローラのチューニング装置、PIDコントローラのチューニング用プログラムおよびPIDコントローラのチューニング方法
【課題】PIDコントローラが、精度良くプロセスを制御できるようにする。
【解決手段】チューニング装置100では、コントローラ10とプロセス20から構成される実際のシステムの操業データを利用して、仮想のコントローラ51と仮想のプロセス52のモデル化を行い、そして、得られたプロセス52のモデルを用いて、コントローラ51の最適な制御パラメータを算出し、その値を参考に、実際のコントローラ10のチューニングを行う。
(もっと読む)
1 - 7 / 7
[ Back to top ]