
Fターム[5H301JJ08]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の速度制御、起動・停止時の制御 (362) | 停止後、微調整を行うもの (3)
Fターム[5H301JJ08]の下位に属するFターム
機械式調整手段を有するもの
載荷台を駆動して位置決めを行うもの (1)
Fターム[5H301JJ08]に分類される特許
1 - 2 / 2
搬送システム
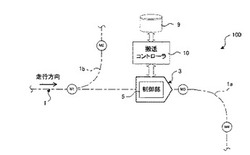
【課題】例えば半導体装置製造用の各種基板等が収容された容器などの被搬送物を、カーブを有する軌道上で搬送する搬送システムにおいて、搬送手段を自由に構成する。
【解決手段】搬送システム(100)は、軌道(1)と、軌道における所定の位置に付けられた補正マークと、軌道に沿って走行して被搬送物を搬送すると共に、所定の位置を通過する際に補正マークを読み取る読取手段(6)、及び軌道に沿って走行した走行距離を検出する距離検出手段(7)を有する搬送手段(3)と、読み取られた補正マークに基づいて、検出された走行距離を補正するための補正係数を取得する補正係数取得手段(5)と、取得された補正係数を用いて検出された走行距離を補正すると共に、補正された走行距離を補正距離として特定する補正距離特定手段(5)とを備える。
(もっと読む)
移動体の停止制御装置

【課題】 制動を開始してから停止するまでの間に生じる振動による目標停止位置に対する誤差を低減し、停止精度を向上する。
【解決手段】 移動体1が停止する目標停止位置を算出する(S102)。目標停止位置に対して、移動体1が制動を開始してから停止するまでの間における変位履歴に基づいて設定されたブレーキ補正値を考慮した手前位置から制動が開始されるように、制動開始位置(S104)を算出する。算出された制動開始位置に基づいて、制動指令(S107)が発せられる。ブレーキ補正値は、変位履歴中における減衰振動の振幅の略中心位置と制動を開始した位置との間の距離に基づいて設定される(S204〜S210)。これにより、機械的なガタ等による振動の影響が考慮され、停止制度を向上させることができる。
(もっと読む)
1 - 2 / 2
[ Back to top ]