
Fターム[5H303EE06]の内容
位置、方向の制御 (6,897) | 位置の設定内容、設定方法、設定手段 (374) | 設定可能な位置が不連続であるもの (6)
Fターム[5H303EE06]に分類される特許
1 - 6 / 6
位置決めテーブル、位置決めクランプ装置、及びメインボディ用位置決め装置。
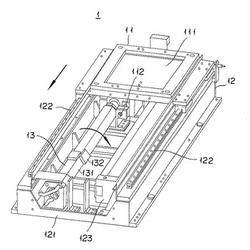
【課題】多段階の位置決めが可能であり、故障や停電等の電気系統のトラブルが発生した際の復旧が極めて容易な汎用位置決めテーブルを提供する。
【解決手段】汎用位置決めテーブル1は、一方向に摺動可能なテーブル11と、当該一方向と平行をなす軸を中心に回転可能なシャフト131と、シャフト131の側面上に設けられた、摺動するテーブル11を停止させるための複数のストッパ132と、を備えている。ここで、摺動するテーブル11は、複数のストッパ132のうちシャフト131の回転により切り替え可能な一のストッパ132に当接することで停止させられる。
(もっと読む)
位置決め装置

【課題】プラテンの表面や周囲に突起した部品を設けることなくスライダの領域検出を行うことができる位置決め装置を実現する。
【解決手段】スライダをプラテン上の所定領域内で移動させる位置決め装置において、
前記スライダの前記プラテンと対向する面の辺縁部に埋設され、前記プラテンへ向けてセンサ信号を発生するセンサ信号発生部と、
前記プラテンの前記所定領域の辺縁部に埋設され、前記センサ信号を検出するセンサ信号検出部と、
を備えたことを特徴とする。
(もっと読む)
小型電動アクチュエータ
【課題】ロッドの位置と移動速度を簡単な構成で制御することができる小型電動アクチュエータを提供すること。
【解決手段】駆動源である電動モータ3の回転を減速機構によって減速してねじ軸4に伝達し、該ねじ軸4に進退可能に螺合するロッド5をねじ軸4の回転によって往復直線移動させる小型電動アクチュエータ1において、前記ロッド5の移動方向に沿ってポテンショメータ(可変抵抗器)10を配設するとともに、該ポテンショメータ10の摺動子10aを前記ロッド5に固定し、該摺動子10aの移動に伴うポテンショメータ10の抵抗変化による電圧変化に基づいてロッド5の位置を制御する。又、前記電動モータ3をDCモータ(可変速モータ)で構成し、前記ポテンショメータ10の抵抗変化による電圧の変化率に基づいてロッド5の移動速度を制御する。
(もっと読む)
電子カム制御装置
【課題】カムの基準位置であるストローク下死点を電子カム動作を行いながら動的に変更させること。
【解決手段】ストローク下死点位置を変更するための加算移動データを設定する加算移動量設定部9と、ストローク下死点変更指令が入力されると、カム位置決め量Aに、ストローク下死点設定部8に設定されたストローク下死点位置および加算移動量設定部9に設定された加算移動データに対応する加算移動量を逐次加算し、この加算結果を出力軸に対する位置指令値として順次出力する位置指令算出部12と、ストローク下死点変更指令が入力されると、ストローク下死点設定部8に設定されたストローク下死点位置に加算移動量設定部9に設定された加算移動データに対応する加算移動量を逐次加算し、この加算結果でストローク下死点設定部8に設定されたストローク下死点位置を順次更新するストローク下死点変更部11とを備える。
(もっと読む)
基板位置決め装置
【課題】 2ヘッドレーザ加工機における2個の加工ヘッドの光軸の位置ずれや傾斜による加工不良を低減化できる基板位置決め装置を提供する。
【解決手段】 基板が載置されるテーブル33およびこのテーブルを保持するテーブル保持台34と、基板の直交する2辺に当接して基板の位置決めをおこなうX軸方向ストッパ37およびY軸方向ストッパ36と、テーブル保持台34に対するX軸方向ストッパ37のX軸方向位置を、所定の基準位置とオフセット位置とに切換えるX軸方向ストッパ位置切換装置47と、テーブル保持台34に対するY軸方向ストッパ36のY軸方向位置を、所定の基準位置とオフセット位置とに切換えるY軸方向ストッパ位置切換装置41と、テーブル33をX軸およびY軸に斜交する斜行方向に水平移動させて基板をX軸方向ストッパ37およびY軸方向ストッパ36に当接させるテーブル駆動装置50とを具備した。
(もっと読む)
位置指令作成方法およびこれを実行する位置制御装置
【課題】 制御周期のN倍の指令周期で位置差分指令が与えられる位置制御装置に、簡単な演算で位置指令を作成できる位置指令作成方法を提供する。
【解決手段】 前記位置差分指令を前記Nで除した商Sおよび余りAと、余り出力演算用変数に前記余りを加算した新たな余り出力演算用変数Hとから、前記余りAが正の場合で、前記余り出力演算用変数Hがゼロ以下のときは前記商Sを、また前記Hがゼロよりも大きいときは前記Hから前記Nを減算した値を新たな余り出力演算用変数とすると共に、前記商Sに1を加算した値を、そして前記余りSが負の場合で、前記Hがゼロ以上のときは前記商Sを、また前記Hがゼロよりも小さいときは、前記Hに前記Nを加算した値を新たな余り出力演算用変数とすると共に、前記商から1を減算した値をそれぞれ位置差分指令とする。
(もっと読む)
1 - 6 / 6
[ Back to top ]