
Fターム[5J083AD07]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 測定量 (1,723) | 距離 (553) | 水平距離 (16)
Fターム[5J083AD07]に分類される特許
1 - 16 / 16
水中物体までの水平距離を算出するための水平距離算出システム及び水平距離算出方法
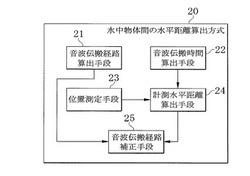
【課題】距離方向に音速プロファイルが変化しても、水中物体までの水平距離の算出誤差を低く抑え、かつ音波伝搬経路の観測誤差や音波伝搬中のゆらぎの影響を極力小さくする。
【解決手段】音速プロファイルに基づいて水中物体までの音波伝搬経路を算出する音波伝搬経路算出手段21と、水中物体までの音波伝搬時間を算出する音波伝搬時間算出手段22と、送信物体と受信物体の位置をそれぞれ測定する位置測定手段23と、送信物体及び受信物体の位置と音波伝搬時間算出手段22が算出した音波伝搬時間とに基づいて送信物体と受信物体との間の計測水平距離を算出する計測水平距離算出手段24と、計測水平距離に基づいて音波伝搬経路算出手段21が算出した音波伝搬経路を補正して補正後音波伝搬経路を生成する音波伝搬経路補正手段25とを備え、音波伝搬経路補正手段25が補正した補正後音波伝搬経路に基づいて水中物体までの水平距離を算出する。
(もっと読む)
車両用障害物監視装置

【課題】車両と障害物との距離や車両の移動方向によらず、誤検知を低減して安定して障害物を検知することができる車両用障害物監視装置を提供する。
【解決手段】車両用障害物監視装置1は、自動車などの車両に取り付けられ、車両周囲の障害物を検知して車両の操作者に警告を行う。障害物監視装置1は、全体を統括的に制御する制御部11と、SRAMからなる記憶部12と、車両の周囲に超音波を送信して物体による反射波を受信する超音波センサ13と、車両操作者に障害物の接近を通知する警告部14とを備える。制御部11は、超音波センサ13が送信波を送信してから反射波を受信するまでの時間に基づいて算出される物体までの距離に応じて判定回数を設定し、設定した判定回数以上連続して反射波を受信すると、警告部14に制御信号を出力して車両の操作者に対して警告を行う。
(もっと読む)
対話装置
【課題】対話処理のためにもともと備わっている音声入力手段や音声出力手段を活用して、操作者までの距離検出を行う。
【解決手段】受付端末20は、音声を入力するためのマイク207と、音声を出力するためのスピーカ208とを有し、周囲で発生しマイク207で取得された雑音情報に基づきスピーカ208を介し距離検出用の疑似雑音を出力し、マイク207を介し入力された疑似雑音の対象物での反射音により対応する振幅あるいは周波数を含む反射音情報を取得し、取得された反射音情報に基づき所定の演算処理を行い、対象物が来訪者Mであると推測して来訪者Mまでの距離を検出し、この検出結果に基づき来訪者Mとの対話による受付処理を開始する。
(もっと読む)
送波器とその駆動方法
【課題】数kHz以下の低周波帯において小型軽量で音響放射効率に優れ、−6dB比帯域幅が40%以上の広帯域特性を有し、かつ、水平方向距離探知能力の高い水中音響送波器を提供する。
【解決手段】2種類の屈曲型送波器10、20の共振周波数をf1、f2と異ならせ、それぞれを鉛直中心軸方向に積層した構成を一つのブロックとし、それと同等のブロックを、共振周波数の高い第2の屈曲型送波器20が配される側が対称軸側となるように、鉛直方向鏡面対称に積層した構造の送波器1であって、かつ、それぞれの振動モードも隣接する周波数同士の屈曲型送波器が互いに逆相となるように駆動させる。これにより、差動接続型多重モードフィルタとして機能させることで広帯域化を実現し、さらには水平方向の音圧分布(指向性)を伸長できる。
(もっと読む)
障害物検出装置、障害物検出方法及びコンピュータプログラム
【課題】移動する移動物から障害物を検出する場合であっても、障害物の相対位置を正確に検出することを可能とした障害物検出装置、障害物検出方法及びコンピュータプログラムを提供する。
【解決手段】駐車支援処理プログラムが実行されると、測距センサ5A,5Bから超音波を車両2の側方へと送信するとともに、所定時間経過後に障害物によって反射された反射波を受信する。その後、超音波の送信位置から反射波の受信位置までの車両の移動距離、測距センサ5A,5Bの測距値等に基づいて車両が受信した反射波の反射地点Pを算出し、反射波の反射地点Pの点列データから障害物を検出するように構成する。
(もっと読む)
水中航走体および障害物探知装置
【課題】海底の様子だけでなく、海面近くの状態も探知することの可能な障害物探知装置並びに該障害物探知装置を備えることにより、比較的浅い海域を円滑に航走することのできる水中航走体を提供することを目的とする。
【解決手段】水中航走体1に互いに間隔をあけて設けられ、該水中航走体1の前方に向けてビームを送出するとともに、該ビームの反射波を受信可能な複数のセンサからなるセンサ群3と、複数のセンサの検出結果から前方の障害物を検出する処理部とを具備し、各センサは、各センサから送出されるビームが交差することなく、かつ、前方に設定されたそれぞれ異なる目標領域に対して送出されるように配置されている。
(もっと読む)
駐車支援装置
【課題】精度の高い駐車区画検知機能を有するとともに、ドライバにとって利便性の高い駐車支援装置を実現することを目的とする。
【解決手段】第一及び第二の距離測定センサをそれぞれ車両に搭載し、前記第一の距離測定センサの出力情報と自車両位置演算手段の演算結果とに基づいて隣接車両の存在領域を特定し、隣接車両が存在しない駐車可能区画の形状と、自車両に対する相対的な位置ならびに傾きを演算する駐車区画検知手段を備えると共に、前記駐車区画検知手段により演算された駐車可能区画の自車両に対する相対的な位置ならびに傾きを前記第二の距離測定センサの出力情報に基づいて補正する駐車区画補正手段を備えた駐車支援装置である。
(もっと読む)
通信装置
【課題】IDを短時間で設定することができる通信装置を提供すること。
【解決手段】ECU10と車内LANで接続される障害物検知センサ20〜50は、後側バンパー100への複数の取り付け態様と、ECU10と通信する際に用いる複数のIDとが対応付けられたIDテーブルが記憶されたメモリ20b1、後側バンパー100への取り付け態様(回転角度)を検出するGセンサ10lなどを備え、回転角度が330度〜30度の場合は自IDに1を設定し(S10、S11)、回転角度が60度〜120度の場合は自IDに2を設定し(S12、S13)、回転角度が150度〜210度の場合は自IDに3を設定し(S14、S15)、回転角度が240度〜300度度の場合は自IDに4を設定する(S16)。
(もっと読む)
自動追尾スキャニングソナー
【課題】
自動追尾スキャニングソナーにおいて、魚群等の標的のサイズ、速度が刻々変化し、或いは、予測値と観測映像との間に誤差が発生している状況でも、最適な抽出領域(位置、サイズ)を決定できるスキャニングソナーを提供する。
【解決手段】
魚群等の標的の、見掛け上のサイズの変化、加速度の変化、予測値と実測値の誤差(差分)等を、過去の複数フレーム分のデータも加味して比較・分析することで、標的の最適な抽出領域(位置、サイズ)を決定する。
(もっと読む)
超音波センサ
【課題】送波又は受波方向から見た大きさを小さくでき、且つ筐体強度も強くできるようにする。
【解決手段】超音波センサ1は、センサ本体2と、圧電振動子3とを備えている。センサ本体2は、筐体4と、軸部5と、面部6とを一体に有する。筐体4は円筒有底形態をなし、底部4aの内面に前記圧電振動子3を面接触状態で接着により取り付けている。前記軸部5は、前記底部4aより幅小(径小)な円柱状をなしており、面部6外面から前記圧電振動子3と反対方向に延出する形態に形成されている。前記面部6は、前記軸部5の先端部に形成されている。この面部6は超音波を送波又は受波するものである。
(もっと読む)
超音波センサ
【課題】 近距離の障害物を検出することができる超音波センサを実現する。
【解決手段】 超音波センサ10は、車両前方に超音波を送信する送信素子11と、障害物で反射された超音波を検出する受信素子12と、送信素子11から送信された超音波を反射して進行方向を変更する反射部材13と、を備えている。反射部材13は、金属、硬質樹脂など超音波を効率よく反射することができる材料により形成され、送信素子11の外周部11bに設けられている。超音波センサ10は、反射部材13により送信可能領域Tを超音波センサ10に近づけた送信可能領域T1に変更することができるため、送信可能領域T1と受信可能領域Rとを超音波センサ10に近い領域で重ねることができるので、反射部材13を備えていない場合に検出可能な領域よりも、近くに存在する障害物M2を検出することができる。
(もっと読む)
超音波センサ装置
【課題】自車両付近の人間や壁などの障害物を検知して運転者にその情報を知らせる車両用超音波信号処理装置は既に広く知られている。しかし従来の装置では部品構成が多く専門的な装着技術が必要であった。
そのため装着に時間がかかり装着にコストが発生した。
【解決手段】電源の配策が不要でコントロールユニット、インジケーター、ブザーの装着が不要となる為、超音波センサ装置の装着において専門的な技術が不要となり誰でも容易に装脱着することが可能になる。
(もっと読む)
障害物検出装置
【課題】近距離にある障害物であっても遠距離にある障害物であっても適切に検出可能な障害物検出装置を提供すること。
【解決手段】障害物検出装置が備える超音波センサは、ECUからの指令に応じて送波周波数および送波出力を変更可能で、これにより、指向性が高くて検出距離が長距離となる遠距離モードと指向性が低くて検出距離が短距離となる近距離モードとを切り替えて、障害物の検出エリアを変更することができる。検出エリアを変更する際には、例えば、車速Vが所定の閾値V2以下の場合には(S420:NO)、近距離モードとされ(S425)、これにより、車両近傍の不感帯を減少させることができる。一方、車速Vが所定の閾値V2より大の場合には(S420:YES)、遠距離モードとされ、これにより、より遠方の障害物を精度良く検出できるようになる。
(もっと読む)
超音波送受波器
【課題】自車両付近の人間や壁などの障害物を検知して運転者にその情報を知らせる車両用超音波信号処理装置は既に広く知られている。
しかし、従来の装置では情報は内部(車内)のみに認知され歩行者等は車両の接近を認知せずそれに伴い危険が生じる場合があった。
またブザー等後進中常に警報を鳴らすシステムは存在するが必要ない時でも鳴りつづけるため周辺への迷惑となる場合もあった。
【解決手段】センサ制御装置にブザーを装着し、検知範囲に人間等が検知された時警報を鳴らす。
このことにより、社外の歩行者に車両の接近を認知させることができる。
(もっと読む)
超音波センサ及び障害物検出装置
【課題】見栄えを向上し、且つ、耐衝撃性を低下させずに広範囲で位相差による方位検出が可能な超音波センサ及び障害物検出装置を提供する。
【解決手段】少なくとも1つの送信用の圧電振動子110と、複数の受信用の圧電振動子110と、圧電振動子110が底面部121の内面122に接触固定された筐体120と、一方の開口端133がバンパ10に形成された貫通孔13を介して外部に露出され、車両外部と外面123との間で超音波を誘導する導波管130とを備える超音波センサ100であって、管部132は、少なくとも受信用の圧電振動子110に対応して複数設けられ、開口端133の開口面積が外面123の面積よりも小さく、開口端133の開口間隔dが外面123の間隔Dよりも狭く、それぞれの長さが、バンパ10における反射波の位相差を互いに保って外面123に伝達する長さに設定されている。
(もっと読む)
超音波コンバータ用のダイヤフラムポット
本発明は、ダイヤフラムを支持するための中空領域を備えた、超音波コンバータ用のダイヤフラムポットであって、ダイヤフラムポットが、電気めっきによって、有利にはクロム被覆層により、被覆されている。  (もっと読む)
(もっと読む)
1 - 16 / 16
[ Back to top ]