
Fターム[5J083EA50]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 表示方法 (282) | その他 (5)
Fターム[5J083EA50]に分類される特許
1 - 5 / 5
魚群予測位置表示システム、水中探知装置、記憶装置、魚群予測装置、魚群予測位置表示プログラム、及び魚群予測位置表示方法
【課題】魚群の位置について精度の高い予測を行って表示する魚群予測位置表示システムを提供する。
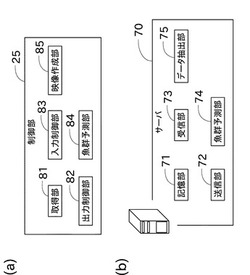
【解決手段】魚群予測位置表示システムは、取得部81と、出力制御部82と、記憶部71と、魚群予測部74と、表示部と、を備える。取得部81は、魚群状況情報を取得する。出力制御部82は、取得部81が取得した魚群状況情報を記憶部71へ出力する。記憶部71は、出力制御部82が過去に出力した複数の魚群状況情報で構成されるデータベースを有する。魚群予測部74は、前記データベースに基づいて魚群予測位置を出力する。表示部は、魚群予測部が出力した魚群予測位置に基づく映像を表示する。出力制御部82が出力する魚群状況情報には、魚群を検出したときの情報と、魚群が検出できなかったときの情報と、が含まれる。魚群予測部84は、これらの情報の対比に基づいて魚群予測位置を出力する。
(もっと読む)
アクティブソーナー装置及びその信号検出方法

【課題】アクティブソーナー装置において、移動速度が小さな目標物であっても残響等から分離して確実に検出できるようにする。
【解決手段】音響信号を受波信号として受波することと、受波信号に対して周波数解析を行うことと、検出における単位周波数幅及び単位時間幅の領域をセルとして、周波数解析の結果に基づきセルごとに受波信号の到来方位と強度とを求めることと、強度が第1のしきい値を超えているセルが周波数方向または時間方向に隣接する場合に、その隣接するセルにおける到来方位の差が第2のしきい値以内かどうかを判定し、第2のしきい値以内である場合に、隣接するセルを1つの検出として連結することと、実行する。
(もっと読む)
魚群探知機
【課題】エコーデータの画像表示において、拡大範囲の指定を容易に行うことができる魚群探知機を提供する。
【解決手段】魚群探知機は、単記画面と拡大画面の複数画面を表示する。単記画面内では、背景色と異なる透過性の色を有する領域を表示する。この領域が拡大範囲を指定するための領域となる。指定領域の位置および大きさは、キー入力により変更してもよいし、カーソルで領域の境界をドラッグすることに変更してもよい。また、カーソルが領域内に入った場合に、領域の配色を変化させ、強調表示するようにしてもよい。
(もっと読む)
水中探知装置
【課題】ユーザーの経験に因ることなく底質及び魚種ひいては水中の様子を直感的に判断することのできる水中探知装置を提供することを目的とする。つまり探知結果を写実的に表した水中探知装置を提供することを目的とする。
【解決手段】前記課題を解決するために本発明における超音波の送受信により水中を探知する水中探知装置は、超音波信号を水中に送信する送信手段と、前記送信された超音波信号のエコー信号を受信する受信手段と、前記エコー信号に基づいて水底を検出する水底検出手段と、前記エコー信号に基づいて前記水底の底質が予め定めた複数種類の底質のうち何れの底質に属するかの確率分布を算出する底質判別手段と、前記確率分布に基づいて、底質を表すテクスチャーを前記水底より下方に表示する底質表示手段とを備えることを特徴とする。
(もっと読む)
底質探知装置
【課題】マルチビーム方式を用いて、正確に底質を推定することができる底質探知装置を提供する。
【解決手段】底質探知装置は、受信した超音波反射信号から水深データDPと反射強度データDRとを得て(S1)、この実測の反射強度データDRから水深による影響を除去して、反射面積による影響のみを残す反射強度データSSAを算出する(S2)。次に、底質探知装置はこの反射強度データSSAに対応する海底面の法線ベクトルを算出して、超音波信号の入射角および海底面の反射面積S(A)を算出する(S5→S6)。次に、底質探知装置は反射強度データSSAと反射面積S(A)とから余角方向の反射強度データSSを算出し、法線方向の反射強度データSS90に変換する(S7→S8)。そして、底質探知装置は、法線方向の反射強度データSSから底質を推定する(S10)。
(もっと読む)
1 - 5 / 5
[ Back to top ]