
Fターム[5J084CA74]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | 重み、係数 (2)
Fターム[5J084CA74]に分類される特許
1 - 2 / 2
距離測定装置
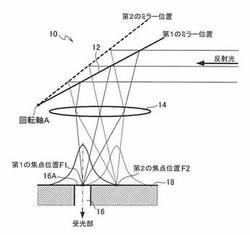
【課題】測定対象物までの距離に拘らず、光検出器のダイナミックレンジの範囲で、測定対象物までの距離を精度よく測定することができる距離測定装置を提供する。
【解決手段】距離測定装置は、測定対象物に対し測定光を投光する光投光部と、等速で回転移動して対象物で反射された反射光を複数方向に反射可能に構成された可動鏡と、可動鏡で反射された反射光を集光する集光素子と、集光素子の焦点面に配置された予め定めた面積の受光領域を備え、受光領域で受光された光を検出する光検出部と、測定範囲の上限距離に在る対象物からの反射光を受光した場合には受光領域への結合効率が最大となる位置に可動鏡を移動させ、測定範囲の下限距離に在る対象物からの反射光を受光した場合には受光領域への結合効率が小さくなる位置に可動鏡を移動させる駆動制御部と、計測時間から測定対象物までの距離を演算する演算部と、を備える。
(もっと読む)
3D画像化方法及び装置
能動的照射目標領域の3D画像化方法は、可変周波数で変調された強度変調光を目標領域に放射する。放射光は目標領域で、そこの存在する物体又は人間の光学的特性に応じて散乱及び/又は反射される。散乱及び/又は反射光の一部が、画像化センサの各画素における位相感知積分により積分時間間隔中に検出される。放射光と検出光間の変調位相が特定され、空間分解される。距離情報が、この空間分解変調位相と変調周波数の平均周波数に基づいて計算される。  (もっと読む)
(もっと読む)
1 - 2 / 2
[ Back to top ]