
国際特許分類[B62D55/065]の内容
処理操作;運輸 (1,245,546) | 鉄道以外の路面車両 (62,921) | 自動車;付随車 (46,083) | 無限軌道車 (1,396) | 軌道帯をもち接地車輪がないもの (140) | 多軌道帯型車両,すなわち.三つ以上の軌道帯をもつもの (56)
国際特許分類[B62D55/065]に分類される特許
1 - 10 / 56
無人走行用移動体
【課題】被災地の調査に適した無人走行用の移動体を開発する。
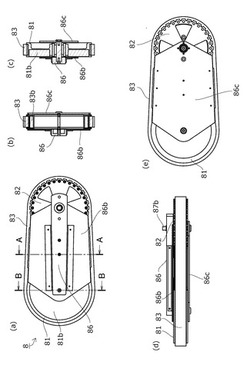
【解決手段】機体2と該機体2を覆う走行用クローラ5から構成される無人走行用の移動体であって、機体2は、内部に移動体制御用の中央収納部21を有し、機体2の下面はクローラベルト53の摺接面を形成し、機体2の前後にはプーリ7が設けられており、走行用クローラ5は、機体2の前後に設けたプーリ7間にクローラベルト53が掛け回され、電動モータ9を駆動源とする無人走行用の移動体。
(もっと読む)
無人走行用移動体

【課題】被災地の調査に適した無人走行用の移動体を開発する。
【解決手段】機体2と該機体2を覆う走行用クローラ5から構成される無人走行用の移動体であって、機体2は、内部に移動体制御用の中央収納部21を有し、機体2の下面はクローラベルト53の摺接面を形成し、機体2の前後にはプーリ7が設けられており、走行用クローラ5は、機体2の前後に設けたプーリ7間にクローラベルト53が掛け回され、電動モータ9を駆動源とする無人走行用の移動体。
(もっと読む)
無人移動体運用システム
【課題】高濃度放射能空間などの人間が立ち入ることが困難で、曲がりくねった原子力施設内を踏査走行できる無人走行移動体の運用システムを提供する。
【解決手段】機体幅の大部分をクローラベルトで覆われた機体であって、機体中央部上面にセンサー類を設置した移動体であって、無線操縦タイプの先行走行移動体とこの先行走行移動体の後方から支援する有線操縦走行移動体とを組み合わせた原子力施設などの高濃度放射能環境下における無人移動体運用システム。
(もっと読む)
無人走行用移動体
【課題】被災地の調査に適した無人走行用の移動体を開発する。
【解決手段】機体2と該機体2を覆う走行用クローラ5から構成される無人走行用の移動体であって、機体2は、内部に移動体制御用の中央収納部21を有し、機体2の下面はクローラベルト53の摺接面を形成し、機体2の前後にはプーリ7が設けられており、走行用クローラ5は、機体2の前後に設けたプーリ7間にクローラベルト53が掛け回され、電動モータ9を駆動源とする無人走行用の移動体。
(もっと読む)
調査用の無人走行移動体
【課題】原子力施設内等の被災地の調査に適した無人走行用の移動体を開発する。
【解決手段】クローラDで覆われた本体Aの中央内部空間部分に走行用制御機器等を収納し、上部に調査用センサ機器などを装着して、走行制御機器類への保護および障害地の走行性および高濃度放射能環境下における調査能力を向上させた無人走行用の移動体Eであって、調査用センサをセンターベースバーCに設け、移動体Eは無線操縦および/又は有線操縦とした。
(もっと読む)
プラットフォームを備えた無人走行用の移動体
【課題】センサなどの安定した取付けができる基台を備えた原子力施設内を走行できる移動体を提供することを目的とする。
【解決手段】箱状の本体(A)と左右に設けられた走行用クローラ(D)を巻きかけるプーリ(B)が本体の前後に装着されており、プーリ(B)はセンターフレームと両側のサイドフレーム間に設けられた軸に軸支されており、センターフレームは機体の幅方向の中央部に存在しており、前後のセンターフレームにセンターベースバー(C)が連結し、センターベースバー(C)の上方に機器装着用のプラットフォーム(P)が装着されており、前記左右の走行用クローラ(D)はセンターフレームの幅の間隔を空けて機体の全巾に掛け回されている無人走行用の移動体。
(もっと読む)
機器設置用支柱を備えた無人走行用の移動体
【課題】センサなどを安定した取付けができる支持構造を備えた原子力施設内を走行できる移動体を提供することを目的とする。
【解決手段】箱状の本体(A)と左右に設けられた走行用クローラ(D)を巻きかけるプーリ(B)が本体の前後に装着されたクローラを備えた無人走行用の移動体であって、
左右のクローラはプーリ(B)のセンターフレームの幅の間隔をあけて機体のほぼ全幅を覆い、前後のプーリのセンターフレームに両端が連結されたセンターベースバー(C)を備えており、センターベースバーに機器装着用の支柱(H)を備えた無人走行用の移動体。
(もっと読む)
無人走行用移動体
【課題】被災地の調査に適した無人走行用の移動体を開発する。
【解決手段】機体2と該機体2を覆う走行用クローラ5から構成される無人走行用の移動体であって、機体2は、内部に移動体制御用の中央収納部21を有し、機体2の下面はクローラベルト53の摺接面を形成し、機体2の前後にはプーリ7が設けられており、走行用クローラ5は、機体2の前後に設けたプーリ7間にクローラベルト53が掛け回され、電動モータ9を駆動源とする無人走行用の移動体。
(もっと読む)
無人走行用移動体
【課題】被災地の調査に適した無人走行用の移動体を開発する。
【解決手段】機体2と該機体2を覆う走行用クローラ5から構成される無人走行用の移動体であって、機体2は、内部に移動体制御用の中央収納部21を有し、機体2の下面はクローラベルト53の摺接面を形成し、機体2の前後にはプーリ7が設けられており、走行用クローラ5は、機体2の前後に設けたプーリ7間にクローラベルト53が掛け回され、電動モータ9を駆動源とする無人走行用の移動体。
(もっと読む)
水位測定装置を備えた無人走行用の移動体
【課題】原子炉冷却水などの水位状態を測定する器具を備えた原子力施設内を走行できる移動体を提供することを目的とする。
【解決手段】横竿を取り付けた回転可能な支柱を用いてセンサを取り付け、水中へ投入可能な位置を選択できる水位測定装置であって、ほぼ全機幅に渡って駆動用クローラで被覆された無人走行用の移動体に適用される水位測定装置である。
(もっと読む)
1 - 10 / 56
[ Back to top ]