
国際特許分類[G01S13/64]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | 電波の反射を使用する方式,例.一次レーダ方式;類似の方式 (1,818) | 物標の相対運動に基づく測定方式 (469) | 速度または軌道の決定方式;運動のセンスの決定方式 (74) | 距離ゲートを使用する速度測定方式 (2)
国際特許分類[G01S13/64]に分類される特許
1 - 2 / 2
追尾処理装置
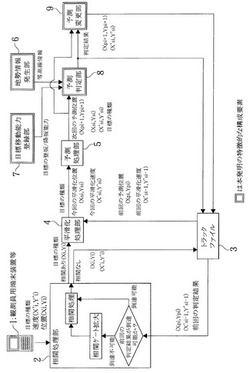
【課題】追尾処理装置において、予測経路上の等高線本数に基づく簡便な方法で予測位置への移動可否を判定する。
【解決手段】開示される追尾処理装置は、観測員用端末装置等1から提供される目標の種類と位置情報をもとに、目標の位置情報と航跡の予測位置とを位置相関する相関処理部2と、現在の平滑化位置・平滑化速度を算出する平滑化処理部4と、次の目標の位置情報入力時に得られる位置を予測する予測処理部5と、監視区域の地勢情報を提供する地勢情報発生部6と、目標が予測された位置へ到達可能か否かを目標の種類ごとに判定する予測判定部8と、判定結果が到達不可能の場合に予測の変更を行う予測変更部9とを有する追尾処理装置において、地勢情報発生部から提供される監視対象領域の等高線情報に基づいて、目標の現在位置と予測位置との間の等高線密度により傾斜の度合いを算定し、算定結果に基づいて、目標が当該予測位置に到達し得るか否かを判定する。
(もっと読む)
オブジェクトの間隔及び速度測定のための装置
本発明はレーダパルスによるオブジェクトの間隔及び速度を測定するための装置に関し、これにより送信及び受信されるレーダパルスは互いに受信側のミキサ(8)において相関される。レンジゲートを設定するための制御装置(7)において、ミキサ(8)に供給される送信側のレーダパルスはそのパルス遅延に関して連続的に上昇及び/又は下降して変化可能である。切り換え装置はドップラー周波数測定モードに切り換えられるか又は距離測定モードにリセットされる。 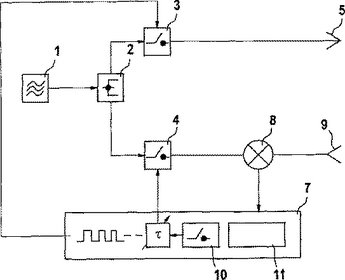 (もっと読む)
(もっと読む)
1 - 2 / 2
[ Back to top ]