
国際特許分類[G05D1/04]の内容
物理学 (1,541,580) | 制御;調整 (21,505) | 非電気的変量の制御または調整系 (4,282) | 陸用,水用,空中用,宇宙用運行体の位置,進路,高度または姿勢の制御,例.自動操縦 (1,941) | 高度または深度の制御 (3)
国際特許分類[G05D1/04]の下位に属する分類
高度または深度の変化率の制御
国際特許分類[G05D1/04]に分類される特許
1 - 3 / 3
飛行体の飛行制御システム
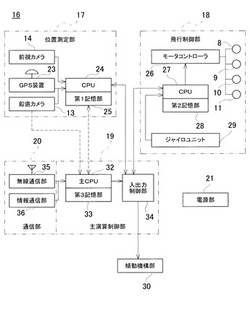
【課題】簡便に而も高精度に飛行体の高さ位置の測定を可能とし、無人飛行時の飛行体の飛行高度を適正に制御可能とした飛行制御システムを提供する。
【解決手段】飛行体と、該飛行体に設けられた航行手段8,9,10,11と、位置測定部17と、前記航行手段を制御する飛行制御部18と、前記位置測定部と前記飛行制御部とを制御する主演算制御部19とを具備し、前記位置測定部は飛行体の地上座標を測定するGPS装置23と、飛行体下方のデジタル画像を撮像する鉛直カメラ13とを有し、該鉛直カメラにより撮像した2地点の画像と、前記GPS装置により測定した2地点の地上座標と、前記鉛直カメラの焦点距離に基づき前記飛行体の高度を測定し、前記主演算制御部は測定された高度に基づき前記飛行制御部を介して前記航行手段を制御し、前記飛行体を所定の高度で飛行させる。
(もっと読む)
特異点のない運動量経路を決定するための方法およびシステム

【課題】宇宙探査機の向きを回転する操縦コマンドが受信される第1のステップを含む宇宙探査機内のCMGの配列のCMGの移動における特異点を回避する方法を提供する。
【解決手段】そこで、宇宙探査機の向きを回転するのに必要なトルクを決定する。次いで、トルクを積分して運動量経路を決定する。運動量経路は直線分の列に分解される。線分毎に、直線分にそった単位ベクトルが決定される。次いで、この単位ベクトルに垂直な平面内で線分の始点と終点とを結ぶ連続的経路があるかどうかが決定される。この単位ベクトルに垂直な平面内で経路にそった点毎に、一組のジンバル角度が決定される。
(もっと読む)
移動ロボット
【課題】 段差を非接触で自動的に検知し、段差に応じて乗越え方法を選択することができる移動ロボットを提供するにある。
【解決手段】 移動ロボットの本体フレーム10は、駆動車輪6,12によって走行路上で移動され、本体フレームの走路方向対して前方には、第1の従動輪30が設けられ、その後方には、第2の従動輪32が設けられている。本体フレームの走路方向の距離は、ある俯角で走行路を観察する距離センサ部28によって検出される。俯角を略一定に維持したまま第1の従動輪及び距離センサを一体的に前記本体フレーム上で上下動させる第1の上下動機構及び第2の従動輪を上下動させる第2の上下動機構が本体フレームに設けられ、距離センサ部からの距離信号に基づいて走路上の段差が検出されて本体フレームの移動とともに第1及び第2の上下動機構が上下動される。
(もっと読む)
1 - 3 / 3
[ Back to top ]