
国際特許分類[H02P6/08]の内容
電気 (1,674,590) | 電力の発電,変換,配電 (135,566) | 電動機,発電機,回転変換機の制御または調整;変圧器,リアクトルまたはチョークコイルの制御 (18,002) | 回転子の位置に依存する電子整流子を有する同期電動機または他の電動機の制御装置;それに用いる電子整流子 (4,020) | 単一電動機の速度またはトルクの制御装置 (1,166)
国際特許分類[H02P6/08]の下位に属する分類
国際特許分類[H02P6/08]に分類される特許
891 - 896 / 896
直列共鳴コンデンサ放電モーター
2個のコンデンサ(22、23)および少なくとも1個のインダクタ(16)を用いて、電気モーターに使用するための交流磁界を形成する。一方のコンデンサ(22)より出る電荷はインダクタ16を通過し、磁界を形成し、および第2のコンデンサ(23)に捕捉される。エネルギーが第2のコンデンサ(23)に加えられ、次にインダクタ(16)を介して第1のコンデンサ(22)に放電されて、第1の放電によって形成された磁界と極性が反対の磁界を形成する。
【選択図】図1 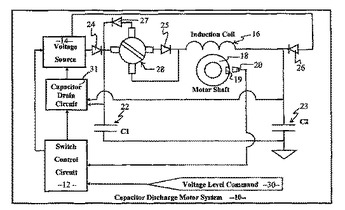 (もっと読む)
(もっと読む)
モータ駆動装置および電動パワーステアリング装置
巻線のインダクタンス値が小さいモータを、電流指令値演算手段や電流制御手段、PWM制御手段などのサンプリング周期が異なる各制御手段で構成するデジタル制御手段で制御されるモータ駆動装置にお
いて、各制御手段でサンプリングされた離散信号を0次ホールドでホールドすると、量子化誤差によりモータ電流に高調波が多く含まれ、よって、モータ騒音が大きくなる問題がある。 サンプリング周期の異なる各制御手段の間にn次ホールド手段を設けることにより、量子化誤差を顕著に低減することができ、その結果、モータ電流に含まれる高調波成分が少なくなり、モータ騒音を大幅に低減することができる。
(もっと読む)
永久磁石ブラシレスモータの磁気伝動装置
永久磁石ブラシレス3相モータであって、このモータは、巻線R、Y、Bと、直列および/または並列のそれぞれの巻線、例えばR、の区分をこの巻線Rの他の全ての区分に選択的に接続するためのスイッチ手段S1〜S12とを含む。制御手段は、モータがこのモータのスピード/トルク特性を変化させるように駆動する一方、異なる形態で巻線区分1〜5を接続するようにスイッチ手段S1〜S12を作動するように提供される。  (もっと読む)
(もっと読む)
電動機駆動システム用のセンサレス制御方法および装置
拡張カルマンフィルタ(330)を使用して初期回転子位置を予測し、その後回転子位置および/または速度を様々なタイプの負荷条件下で正確に予測する方法および装置が、電動機(106)のための状態オブザーバ制御システム(600)を提供する。初期回転子位置の様々な設定から、推定回転子位置/速度を出力としてもたらすことができる、制御システムモデル(300)が生成される。制御システムモデル(300)は、EKF(拡張カルマンフィルタ)推定器(330)と、速度コントローラ(322)と、電流コントローラ(324)と、可変負荷構成要素(310)とを含む。動作中、EKF推定器(330)は、速度および電流コントローラ(322、324)とフレーム変換(326、328)からの入力によって生成された基準電圧(402、404)および基準電流(1325)に基づいて、回転子速度(327)および位置(333)を推定する。さらに、基準電圧および基準電流(402、404、1325)は、システム(600)内のフィードバック信号(418、346)として、かつ電動機負荷(602)に印加する電力を制御するための駆動信号として使用されるように、フレーム変換される。  (もっと読む)
(もっと読む)
モータ駆動装置およびモータ

【課題】 各種家電機器に使用される送風モータの駆動制御において、高価で複雑な誘電体プロセスの1チップICを使用せずに、モータの駆動装置を提供する。
【解決手段】 プリドライブIC5と、トランジスタアレイ6と、MOSFETアレイ12を主要構成要素とし、前記プリドライブIC5で、前記トランジスタアレイ6と、前記MOSFETアレイ12を通電制御する構成で、モータの駆動制御を可能とするモータの駆動装置が得られる。
(もっと読む)
ブラシレスモータの制御装置
891 - 896 / 896
[ Back to top ]