
個人の両眼の屈折特性の少なくとも1つを自動的に測定するための方法及び装置
本発明は、個人の両眼(OD、OG)の屈折特性の少なくとも1つを自動的に測定する方法に関し、この方法は、a)各々の捕捉された画像をその画像を表す信号に変換するようになっている画像捕捉装置(10)に関連付けられた参照枠(O、X、Y、Z)内において、上記個人の要望にしたがって、上記個人の頭部の少なくとも1つの姿勢を調整する段階と、b)画像捕捉装置(10)に関連付けられた上記参照枠(O、X、Y、Z)内の既知の位置の少なくとも1つの光源(20)によって両眼(OD、OG)を照明する段階と、c)個人の頭部に関連付けられた参照枠内において、その個人の注視方向に関連付けられた少なくとも1つの注視方向パラメータ(H)を測定する段階と、d)段階c)において測定された注視方向パラメータに対応する、個人の両眼(OD、OG)の網膜上での上記光源(20)の網膜反射の少なくとも1つの画像(IROD1、IROG1、IROD2、IROG2)を捕捉するために上記画像捕捉装置(10)を使用する段階と、f)段階d)において捕捉された上記少なくとも1つの画像から、個人の眼(OD、OG)各々について上記屈折特性(D)を決定する段階と、h)決定された屈折特性に関連して、上記段階d)の画像捕捉中に測定された個人の注視方向に関連付けられた注視方向パラメータ(H)を記憶する段階とを含む。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、概して個人の眼の光学特性を測定する方法に関する。さらに明確に述べると、本発明は、個人の両眼の屈折特性の少なくとも1つを自動的に測定するための方法に関する。
【0002】
本発明は、さらに,この方法が実施されることを可能にする測定装置にも関する。
【背景技術】
【0003】
個人の眼の屈折特性は、個人の視力を矯正するための眼鏡を作成することにおいて不可欠な役割を果たす重要なものである。
【0004】
個人の眼の屈折特性を決定するための様々な方法と装置が現時点で知られている。これらの方法と装置は、特に、写真屈折検査法(photorefraction)と、いわゆる「網膜検影法」とに基づいている。
【0005】
しかし、これらの方法とその関連装置は、実行において時間浪費的である。
【0006】
観察者が裸眼で上記網膜反射を観察するために使用する手動装置は、あまり正確ではない。検出器を使用して精度が改善されているが、個人の眼の各々が個別的に測定される必要があるので、その測定を行うためには長い時間を要する。個人の2つの眼の片方の眼だけからの網膜反射だけが1度に観察される。
【0007】
これに加えて、既知の装置は、例えば、額のための受け台によって、及び、顎の支持体によって、及び/又は、例えば個人が注視(gaze)する目標を有することによって注視方向を制約するための手段によって、画像捕捉装置に関連付けられた参照枠内において個人の頭部及び/又は眼に対して予め規定された姿勢を強制するための拘束手段を含む。
【0008】
したがって、こうした既存の方法と装置を使用して行われる屈折特性の測定は、個人の姿勢と注視方向とに関して自然な状態では行われず、したがって、個人の両眼視力が考慮に入れられることを可能にしない。
【0009】
例えば、こうした測定は、近見視条件又は中間視条件の下での個人の眼の屈折特性を測定することを可能にしない。
【0010】
あいにく、眼の屈折特性は、視力条件(vision condition)と、個人によって行われる作業と、個人の姿勢及び注視方向とに基づいて、著しく変化しうる。
【発明の概要】
【発明が解決しようとする課題】
【0011】
本発明の目的は、個人が非拘束的で快適で自然な姿勢をとっている間に、且つ、決定された視力条件の下で、迅速且つ確実な形で個人の両眼の屈折特性を測定することを可能にする方法及び装置を提供することである。この自然な姿勢は、個人にとって人間工学的に最良であり且つ最も疲れが少ない姿勢に該当する。言い換えると、この自然な姿勢は、個人が通常とる姿勢に該当する。
【課題を解決するための手段】
【0012】
このために、本発明は、個人の両眼の屈折特性の少なくとも1つを自動的に測定する方法を提供し、この方法は、
a)各々の捕捉された画像をその画像を表す信号に変換するようになっている画像捕捉装置に関連付けられた参照枠内の既知の位置の少なくとも1つの光源によって両眼を照明する段階と、
b)画像捕捉装置に関連付けられたその参照枠内において、個人の要望にしたがって、その個人の頭部の少なくとも1つの姿勢を調整する段階と、
c)個人の頭部に関連付けられた参照枠内において、その個人の注視方向に関連付けられた少なくとも1つの注視方向パラメータを測定する段階と、
d)個人の両眼の網膜上での上記光源の網膜反射の少なくとも1つの画像を捕捉するために上記画像捕捉装置を使用する段階と、
f)段階d)において捕捉された上記少なくとも1つの画像から、個人の眼の各々について上記屈折特性を決定する段階と、
h)決定された屈折特性に関連して、段階d)の画像捕捉中に測定された個人の注視方向に関連付けられた注視方向パラメータを記憶する段階
とを含む。
【0013】
本発明は、さらに、予め規定された視力条件の下、個人の両眼の屈折特性の少なくとも1つを自動的に測定する方法を提供し、この方法は、
a)各々の捕捉された画像をその画像を表す信号に変換するようになっている画像捕捉装置に関連付けられた参照枠内において、上記個人の要望にしたがって、個人の頭部の少なくとも1つの姿勢を調整する段階と、
b)画像捕捉装置に関連付けられた上記参照枠内の既知の位置の少なくとも1つの光源によって両眼を照明する段階と、
c)個人の頭部に関連付けられた参照枠内において、その個人の注視方向に関連付けられた少なくとも1つの注視方向パラメータを測定する段階と、
i)個人の両眼の網膜上での上記光源の網膜反射の少なくとも1つの画像を上記画像捕捉装置によって捕捉する段階であって、この画像が、画像捕捉平面内において、上記予め規定された視力条件に対応する範囲内に置かれている上記注視方向パラメータの値に関して捕捉される、段階と、
j)上記少なくとも1つの捕捉画像から、上記予め規定された視力条件における個人の各々の上記屈折特性を測定する段階
とを含む。
【0014】
したがって、個人の各々の眼の屈折特性、例えば、屈折異常の符号(sign)、又は、上記屈折異常の値、すなわち、その球面及び/又は円柱屈折力が個人にとって自然で快適である姿勢において測定され、これによって、個人の実際の視力条件の下で上記屈折特性が決定されることが可能となる。このことが、こうした測定の精度を向上させる。さらに、この屈折特性は、個人の注視方向に関連付けされた注視方向パラメータに関連している。
【0015】
用語「注視方向に関連付け(link)された」は、上記注視方向パラメータ及び上記個人の注視方向の一方が他方から計算されることを可能にする、上記注視方向パラメータと上記個人の注視方向との間に数学的関係が存在するということを意味するために使用されている。
【0016】
この関連付け(link)は、直接的であってもよく、この場合には、注視方向パラメータが典型的には眼の方向を追跡するために画像認識を使用することにあり、又は、間接的であってもよく、この場合には、測定されたパラメータが頭部に対して排他的に関係し且つ頭部の1つ又は複数の位置及び/又は方向座標にある。このことは、本発明の特定の具体例において、より詳細に後述されている。
【0017】
したがって、この方法は、眼の屈折特性の測定値の各々に関連する確立されるべきマップ(map)が、対応する個人の注視方向に関連付けられることを可能にする。このことは、特に、遠見視に関連付けられた屈折特性値から近見視又は中間視に関連付けられた屈折特性値を識別することを可能にする。
【0018】
用語「近見視」は、本明細書において、25センチメートル(cm)から69cm離れている物品を個人が注視している条件を意味するために使用されており、及び、用語「中間視」は、70cmから199cm離れている物品を個人が注視している条件を表すために使用され、及び、用語「遠見視」は、少なくとも200cm離れている物品を個人が注視している条件を表すために使用される。
【0019】
個人は、手動によって若しくは遠隔操作によって、又は、この個人が要望するように調整が行われるように指示を与えることによって、画像捕捉装置の位置と方向を調整する。
【0020】
代替的に、画像捕捉装置の位置が固定されている場合、個人は、装置に面している間、その個人自身が要望する通りの姿勢をとる。
【0021】
この方法では、個人の両眼の屈折特性は同時に測定される。したがって、測定は容易であり、且つ、迅速に実行されることが可能である。この方法は、さらに、調節システムと両眼視力における眼の輻輳(convergence)との実態を考慮に入れることを可能にする。
【0022】
本発明の第1の有利な特徴によって、さらに、次の段階、すなわち、
e)光源の網膜反射の画像の幅又は輝度分布を上記少なくとも1つの捕捉画像から決定し、及び、上記幅又は上記輝度分布の関数として個人の両眼の各々の上記屈折特性を決定する段階
が提供される。
【0023】
こうした状況では、有利であることに、両眼が同時に照明され、両眼の網膜上の光源の網膜反射の画像が同時に捕捉され、段階e)において、光源の網膜反射の画像の幅又は輝度分布は、少なくとも、上記光源に対する個人の頭部の各々の姿勢において同時に捕捉される両眼の網膜反射に関係する上記信号から決定される。
【0024】
本発明のこの実施態様は、有利であることに、写真屈折検査法によって上記屈折特性を決定することを可能にする。
【0025】
本発明の別の有利な特徴によって、両眼が同時に照明され、両眼の網膜上の光源の網膜反射の画像が同時に捕捉され、段階e)において、光源の網膜反射の画像の幅又は輝度分布は、少なくとも上記光源に対する個人の頭部の各々の姿勢において同時に捕捉される両眼の網膜反射に関係する上記信号から決定される。
【0026】
その後、光源の網膜反射の画像の幅又は輝度分布から個人の眼の各々の屈折異常についての値が推定される。
【0027】
このことが、各々の眼の屈折異常に関する正確な値を決定することを可能にする。
【0028】
本発明の別の有利な特徴によって、個人の2つの眼の各々の網膜上の上記光源の網膜反射の少なくとも2つの画像が捕捉され、この方法は、さらに、
e’)上記少なくとも2つの捕捉画像から、光源の網膜反射の画像の移動を決定する段階
を含み、
個人の両眼の各々の上記屈折特性は上記移動の関数として決定される。
【0029】
本発明の別の有利な特徴によって、
2つの画像捕捉中に、異なる上記光源に対する個人の頭部の姿勢について、
段階c)において、上記2つの画像捕捉中に、個人の頭部の少なくとも一つの姿勢パラメータが画像捕捉装置の参照枠内において測定され、
段階e’)において、決定された網膜反射の画像の移動が、段階c)において測定された上記頭部姿勢パラメータの関数として、2つの画像捕捉の間の光源に対する個人の頭部の姿勢の相違と比較され、
個人の眼の各々の眼の上記屈折特性はこの比較から推定される。
【0030】
本発明の実施は、有利であることに、網膜検影法によって上記屈折特性を決定することを可能にする。
【0031】
この場合に、有利であることに、個人の各々の眼の屈折異常の符号は上記比較から推定される。
【0032】
本発明の別の有利な特徴によって、両眼が同時に照明され、両眼の網膜上の光源の網膜反射の画像が同時に捕捉され、段階e’)において、光源の網膜反射の画像の移動が、少なくとも上記光源に対する個人の頭部の各々の姿勢において同時に捕捉される両眼の網膜反射に関係する上記信号から決定される。
【0033】
次に示す頭部姿勢パラメータの少なくとも1つが測定されることが有利である。
・個人の頭部又は片方の眼と画像捕捉装置との間の距離、
・画像捕捉装置の瞳と、個人が自然な姿勢の状態にあり且つ画像捕捉装置に眼を向けているときに傾斜している個人の解剖学的平面との間の垂直距離であって、上記平面は、個人が自然な姿勢の状態にあり且つ水平に見ているときにほぼ水平である水平解剖学的平面に相当する垂直距離、
・画像捕捉装置の瞳と、個人が自然な姿勢の状態にあり且つ水平に見ているときにほぼ水平である水平解剖学的平面との間の距離、
・第1の参照平面の水平軸線の周りにおける、第1の参照平面に対する画像捕捉平面の第1の傾斜角度であって、第1の参照平面は、この画像捕捉装置の瞳に個人の一方の眼を接続する線に対して垂直である、第1の傾斜角度、及び、
・上記水平軸線に対して垂直なこの第1の参照平面の軸線の周りにおける、上記第1の参照平面に対する画像捕捉平面の第2の傾斜角度。
【0034】
一例を示すと、個人の頭部に関するこれらの姿勢パラメータは、その個人が画像捕捉装置を保持する態様とは無関係に、画像捕捉装置に対する着用者の頭部の位置が正確に決定されることを可能にする。
【0035】
画像捕捉中に、上記光源と上記画像捕捉装置とが上に取り付けられている支持体が、上記個人によって手で支えられることが好ましい。このことは、個人が自分が自然で快適であると分かる状態にあることを確実なものにすることを可能にする。
【0036】
本発明の別の有利で非限定的な特徴によって、個人が画像捕捉装置の瞳の付近を見つめている間、すなわち、その瞳の付近の定められた区域内を見ている間に、上記少なくとも1つの画像が捕捉されることを検証するための検証段階が画像捕捉段階の前又は後に行われる。
【0037】
本発明の別の有利で非限定的な特徴によって、上記注視方向パラメータは、排他的に、個人が画像捕捉装置の瞳を注視している間に測定される個人の頭部の姿勢パラメータである。
【0038】
本発明の別の有利で非限定的な特徴によって、少なくとも1つの画像を捕捉する前の準備段階中に、視力矯正機器が上記個人の顔の上に配置され、上記捕捉画像を表す信号及び/又は上記信号から推定された屈折特性は、この視力矯正機器の屈折力(power)と偏角(deflection)とに応じて矯正される。
【0039】
その後、本発明の方法の画像捕捉中に捕捉される画像は、例えば眼鏡フレームのリムの下端縁と個人の各眼の瞳孔との間の高さのような、個人の他の自然形態学的(physico−morphological)パラメータを決定するために処理されることが可能である。
【0040】
本発明の別の有利で非限定的な特徴では、段階c)において、個人の注視方向が、両眼の角膜反射の画像を表す信号から計算される。
【0041】
これに加えて、本発明の方法の一変形例が、
r)少なくとも1つの画像の捕捉の前又は最中に、個人の眼の前に画像を表示し、この画像は、上記画像の空間周波数をフィルタリングするための特定のカットオフの周波数フィルタによるローパスフィルタリングに相当する不鮮明性を表す段階と、
t)段階r)において使用されたローパスフィルタのカットオフ周波数の値に関連して決定された屈折特性を記憶装置内に記憶する段階と、
u)画像フィルタの様々なカットオフ周波数に関して、少なくとも段階b)、c)、d),f)、r)及びt)、又は、段階b)、c)、i)、j)、r)及びt)を繰り返す段階
とを含む。
【0042】
したがって、この方法は、段階r)において使用されたフィルタのカットオフ周波数の様々な値に関して、ひいては画像における様々な度合いの不鮮明性(fuzziness)に関して、当該不鮮明画像を見る条件の下、個人の眼の屈折特性を測定することを可能にする。
【0043】
その後、有利であることに、個人の眼の屈折特性が画像不鮮明性の度合いの変化に応じてどのように変化するかを決定することが可能である。
【0044】
さらに、その画像における様々な度合いの不鮮明性に関して個人による不鮮明性の認知を特徴付けることと、不鮮明性の認知が画像の不鮮明性の度合いの変化に応じてどのように変化するのかを決定することとが可能である。
【0045】
したがって、この変形例は、心理物理的な試験が行われることを可能にする。
【0046】
本発明の別の変形例では、
・上記画像捕捉段階中に、少なくとも2つの画像が連続的に捕捉され、これらの画像の各々は、個人の両眼の網膜上の上記光源の2つの網膜反射の画像に相当し、
・上記2つの画像の一方から個人の2つの眼の一方の上記屈折特性を決定し、且つ、他方の画像から個人の他方の眼の屈折特性を決定する。
【0047】
本発明は、さらに、個人の両眼の屈折特性の少なくとも1つを自動的に測定するための装置を提供し、この装置は、
・支持体と、
・個人の眼の少なくとも一方の眼を照明するような態様において支持体上に取り付けられている少なくとも1つの光源と、
・個人の各眼の網膜上の上記光源の網膜反射の少なくとも1つの画像を捕捉するようになっており、且つ、各捕捉画像を捕捉画像を表す信号に変換するようになっている、上記支持体上に取り付けられている少なくとも1つの画像捕捉装置であって、光源に対する個人の頭部の姿勢が2つの画像捕捉の間で異なり、上記光源は上記画像捕捉装置に関連付けられた参照枠内の既知の位置にある、少なくとも一つの画像捕捉装置と、
・個人の頭部に関連付けられた参照枠内において個人の注視方向に関連付けられた少なくとも1つの注視方向パラメータを測定するための手段と、
・個人の眼の上記屈折特性を決定するために上記少なくとも1つの捕捉画像を表す信号に応答し、且つ、決定された屈折特性に関連して個人の注視方向に関連付けられた上記少なくとも1つの注視方向パラメータを記憶装置内に記憶するようになっているコンピュータと
を備える。
【0048】
本発明の別の有利で非限定的な特徴によって、個人の頭部の上記姿勢パラメータを測定するための前記手段は、個人の頭部の上又は眼鏡の上に取り付けられるようになっている、個人の頭部の位置を識別するための要素、少なくとも1つの超音波送信器と少なくとも1つの超音波受信器とを含む測定装置、又は、電磁センサを使用する測定装置を備える。
【0049】
この測定装置は、個人の頭部の姿勢パラメータを遠隔的に迅速に且つ正確に測定することを可能にする。
【0050】
本発明の別の有利で非限定的な特徴によって、光源が、公知である互いに対する相対的な位置を有する複数の二次光源を備え、これらの二次光源の各々は互いに独立的に点灯させられうる。
【0051】
各々の画像捕捉のために異なる光源を起動することによって、個人の頭部が動かないならば、上記光源に対する個人の頭部の姿勢が各々の画像捕捉中に異なっていることを確実なものにすることが可能である。
【0052】
あるいは、代替策として、光源が画像捕捉装置に対して移動可能であってもよい。
【0053】
非限定的な具体例として示されている添付図面を参照しながら行われる以下の説明が、本発明が何であるかということと、本発明がどのように実施されるかということとを示す。
【図面の簡単な説明】
【0054】
【図1】個人が測定装置を手で保持している、本発明の方法の実施形態の斜視図である。
【図2】第1の画像捕捉中に個人が図1の測定装置の方を見ている時の、図1の個人の眼の略斜視図である。
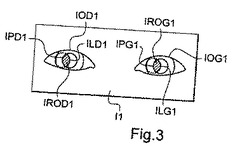
【図3】図2に関連付けられた、捕捉された第1の画像の画像捕捉平面における概略図である。
【図4】第2の画像捕捉中に個人が図1の測定装置の方を見ている時の、図1の個人の眼の略斜視図である。
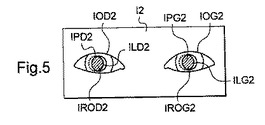
【図5】図4に関連して捕捉されたときの第2の画像の画像捕捉平面における概略図である。
【図6】図1の測定装置を手に持っている個人の側面図である。
【図7】個人の眼と図1の測定装置とを示す、水平平面における略平面図である。
【発明を実施するための形態】
【0055】
全般的に述べると、この着想は、既知であるか又は決定されている視力条件の下で、自然な姿勢である個人の両眼の屈折特性の少なくとも1つを自動的に測定することである。したがって、対応する眼の屈折特性に関連してこの注視方向パラメータを記録するために、又は、測定された注視方向パラメータが個人が予め規定された当該視力条件にあるということを示す時に、画像捕捉を起動させるために、又は、一連の画像が捕捉され終わった後に、これらの条件の下で眼の屈折特性を決定するように当該の視力条件の下で捕捉された画像を選択するために、各々の捕捉画像に対応する注視方向に関連しているパラメータの測定が行われる。
【0056】
特に重要なのは、個人が近見視又は中間視で見ている場合の視力条件である。眼の屈折特性は、眼が近見視又は中間視に追従する「調節」として知られている現象によって著しく変化させられる可能性がある。
【0057】
後述の具体例では、この測定は、例えば、The British Journal of Ophthalmologyにおいて1944年にM.Kleinによって発表された標題「検影法の原理」の論文に説明されているような、網膜検影法の原理に依拠している。
【0058】
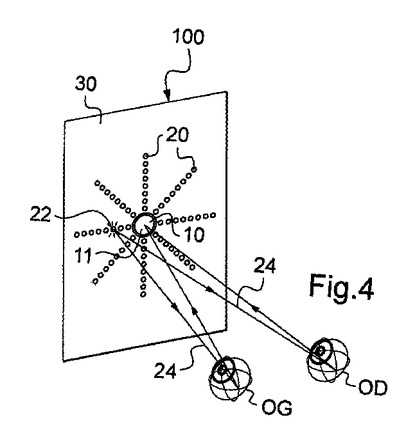
本発明の測定装置100の一例が、図1と図2と図4とに示されている。この測定装置100は、画像捕捉装置10と、個人の頭部を照明するための照明手段20とのための支持体として使用されるハウジング30を備える。
【0059】
ハウジング30は長方形タブレットの形であることが有利である。
【0060】
一例として、次の屈折特性、すなわち、屈折異常符号(ametropia sign)、球面屈折力、円柱屈折力、及び、円柱の軸線の位置の少なくとも1つを決定することによって、個人の各々の眼の客観的な屈折異常(objective ametropia)を決定することが望ましい。
【0061】
近視の場合には屈折異常符号は負であり、遠視の場合には屈折異常符号は正である。屈折異常の値は、眼の球面屈折力と円柱屈折力とに対応する。この値は、眼の様々な経線に沿って決定される。円柱屈折力と円柱の軸線とが眼の乱視を特徴付ける。
【0062】
これらの屈折特性は、個人の屈折異常の矯正に適合させられている眼鏡レンズのタイプ(眼鏡レンズの収束、発散、環状面、及び、屈折力)が決定されることを可能にするので、個人に対して適合させられた光学機器を選択する時に不可欠である。
【0063】
個人は、図1に示されているように、立っていようと座っていようと、自然な姿勢の状態にある。測定装置100に対する個人の姿勢は、顎支持体又は額受け台によって束縛されない。用語「自然の」姿勢は、最も快適であり、最も人間工学的に適しており、個人にとって最も疲れにくい、個人の姿勢を意味するために使用される。
【0064】
段階a)では、個人の頭部の少なくとも1つの姿勢が、個人の要望に応じて、画像捕捉装置に関連付けられた参照枠内において調整される。
【0065】
このことは、特に測定装置を個人が手で保持する第1の実現形態では、例えば図1に示されているように、個人が自由に姿勢をとり、画像捕捉装置100をその個人が要望する場所に置くことによって、単純に個人によって手動で行われてもよい。
【0066】
画像捕捉装置が支持体上に置かれるか又は台の上に取り付けられる第2の実施形態では、測定装置の位置決めが変更されることを可能にする遠隔操作装置によって、又は、指示にしたがって測定装置の位置を変更するオペレータに対して声による命令を与えることによって、個人がこの調整を遠隔的に行うことが可能である。
【0067】
最後に、第3の実施形態では、測定装置は定置されており、個人は、測定装置100に対して所望の位置をとる。
【0068】
したがって、その実施形態が何であろうとも、自然であり且つ束縛されていない位置にある個人の頭部の画像を捕捉することが可能である。このことが、実際の視力条件の下で個人の眼の屈折特性を決定することを可能にする。
【0069】
一変形例では、例えば画像捕捉装置の瞳の付近に置かれたテキストを読むことのような特定の目視作業が、個人に課せられるだろう。この場合に、このことが、画像が捕捉されることを可能にし、このため、目視作業を行うために個人が自然に採用する姿勢において個人の眼の屈折特性が決定されることを可能にする。
【0070】
段階b)では、オペレータが、既知の画像捕捉装置に関連付けられた参照枠(O、X、Y、Z)内の既知の位置を有する少なくとも1つの光源によって個人の両眼を照明する。
【0071】
画像捕捉装置10に関連付けられた参照枠(O、X、Y、Z)は、例えば、画像捕捉装置の瞳の上で中心に配置されるだろう。軸線(O、X)(O、Y)は、画像捕捉平面PCI内を延び、この画像捕捉平面PCIは、この場合には支持体30の平均平面によって表される画像捕捉装置のセンサの平面である。軸線(OZ)は、画像捕捉装置の光軸であり、この軸線は画像捕捉平面PCIに対して垂直である。
【0072】
図1と図2と図4とに示されている例では、測定装置100の照明手段20は複数の光源20を備える。これらの光源は、非常に小さいサイズ、例えば、ほぼ点のサイズであることが好ましい。例えば、光源の各々が約1ミリメートル(mm)の幅を有する。この例では、光源は発光ダイオード(LED)20である。これらのLEDの各々はそれぞれ互いに独立的に点灯させられて個人の両眼を照明する。これらのLEDは発散光源を構成する。したがって、有利なことに、これらのLEDは、非常に広い立体角を照明し、その結果として個人の頭部が広範囲に照明される。
【0073】
本明細書に説明されている光源20は一次光源であるが、しかし、一変形例では、この光源20は、この一次光源から到来する光線自体を反射又は偏向させることによって得られる二次光源であることが可能である。
【0074】
この例では、LEDは、画像捕捉装置10のための支持体としても機能するハウジング30の前面上に配置されており、このため、画像捕捉装置の参照枠内におけるこれらのLEDの各々の位置が構造によって分かっており且つ一定不変である。
【0075】
この例では、LEDは、ハウジング30の前面の平面内に位置しており、且つ、画像捕捉装置10の瞳11が位置している箇所において交差する4つの位置合わせ方向に沿って位置合わせされている。
【0076】
あるいは、この代わりに、当業者に公知である任意の他のタイプの光源を使用することを想定することが可能である。所定の位置にある時に、画像捕捉装置の参照枠内において個人の頭部に対して相対的に移動させられることが可能な単一の光源を使用することが可能である。この場合に、測定装置が、この参照枠内の光源の位置を決定するための手段を有する。
【0077】
画像捕捉段階では、画像捕捉装置10は、個人の2つの眼の網膜上の上記光源の網膜反射各々の少なくとも1つの画像、好ましくは2つの画像を捕捉し、各々の画像は対応する画像捕捉平面内で捕捉され、上記光源に対する個人の頭部の相対的姿勢はこの2つの画像捕捉の間で異なっている。
【0078】
画像捕捉装置による画像捕捉はオペレータによって起動されるか又は例えば電子及びコンピュータ装置によって自動的に起動される。
【0079】
例えば、この電子及びコンピュータ装置は、画像取得及び、取得された画像の処理のための、そのコンピュータ上に実装されているソフトウェアを有するコンピュータを備える。
【0080】
測定装置100は、対応する通信手段を有するコンピュータと通信するための手段を有することが好ましい。測定装置100とコンピュータとの通信手段は有線又は無線タイプであってよく、任意の従来通りの設計であってよく、したがって、この通信手段は説明されない。これらの通信手段が、共通のネットワークアーキテクチャの中に、又は、画像捕捉装置が複数のコンピュータと通信することを可能にする固定通信リンクの中に組み込まれていることが有利である。
【0081】
したがって、この電子及びコンピュータ装置は、オペレータによって予め規定された間隔で画像捕捉を起動する。測定装置100は、捕捉された画像を電子及びコンピュータ装置に送信し、及び、この電子及びコンピュータ装置は、後述されているように、段階c)で行われる個人の頭部に関する姿勢パラメータの測定値を受け取る。
【0082】
一変形例では、電子及びコンピュータ装置が、第1に、捕捉画像及び/又はこれらの画像を処理する段階中に得られた結果を通信するための表示スクリーンと、第2に、この電子及びコンピュータ装置がこれらの結果を他の機器と通信することを可能にする結線とを含む独立したシステムであるように講じられることがある。さらに、このシステムのための独立した処理システムが測定装置100内に採用随意に組み込まれるように講じられることがある。
【0083】
例えば、2つの画像捕捉が図2と図4に示されている構成において行われる。これらの図は、測定装置100に対する、これら2つの画像の捕捉中の個人の眼を示す概略図である。
【0084】
図2に示されているように、第1の画像捕捉中に、測定装置100のLED20の第1のLED21が、点灯させられて、光線23によって表されているように個人の右眼ODと左眼OGとを同時に照明する。これらの光線23は個人の眼OD、OGの各々の中の網膜を照明し、したがって、その次に、網膜は二次光源として作用する。これらの光線は網膜によって拡散の形で反射され、及び、眼から出て元に戻る。これらの光線23の一部分は、網膜によって拡散の形で反射され、対応する眼OD、OGを出て、画像捕捉装置10の瞳11によって受け取られる。
【0085】
同様に、図4に示されている第2の画像捕捉中に、測定装置の第2のLED22が、点灯させられて、光線24によって表されているように、個人の右目ODと左眼OGを同時に照明する。これらの光線は個人の眼OD、OGの各々の中の網膜を照明する。これらの光線24の一部分は、網膜によって反射され、対応する眼OD、OGを出て、画像捕捉装置10の瞳11によって受け取られる。
【0086】
したがって、画像捕捉装置10によって捕捉される対応する画像I1、I2は、個人の眼OD、OGの各々の網膜上の対応する第1及び第2のLED21、22の反射画像IROD1、IROG1、IROD2、IROG2を含む。
【0087】
一般的に、各々の網膜反射画像IROD1、IROG1、IROD2、IROG2の一部分だけが、各々の眼OD、OGの瞳孔11を通して目視可能である。目視可能な画像の一部分は、個人の瞳孔と画像捕捉装置の瞳との間を延びる切頭円錐形の空間の中に位置する部分である。
【0088】
この例では、網膜反射の画像IROD1、IROG1、IROD2、IROG2が、対応する眼の画像IOD1、IOG1、IOD2、IOG2内に網掛け表示の形で示されている(図3及び図5)。捕捉画像において目視不可能なこの反射画像の輪郭が、点線として描かれている。
【0089】
この電子及びコンピュータ装置は、実際には、一連の画像を捕捉する働きをし、目視可能な網膜反射画像をその上に有する画像だけが引き続いて保持される。特に、この電子及びコンピュータ装置は、上記切頭円錐形空間に入って出ていく画像に相当する2つの画像を選択し、この1対の画像が最大量の情報に対するアクセスを与える。
【0090】
この例では、画像捕捉装置の参照枠内の個人の頭部の姿勢が、画像が捕捉されている最中は同一のままであるが、しかし、異なるLEDが各々の画像捕捉中に点灯させられるので、上記光源に対する相対的な個人の頭部の姿勢は2つの画像捕捉の間で異なる。この目的のために、例えば、非常に短い時間間隔で隔てられている2つの画像を捕捉することが可能であり、したがって、この時間間隔内における個人のあらゆる移動が非常にわずかである。例えば、この時間間隔は、2ミリ秒(ms)から100msの範囲内であるだろう。
【0091】
図3と図5に概略的に示されている画像I1、I2を比較することによって、画像I1内のLED21の反射の画像IROD1、IROG1の位置が、画像I2内のLED22の反射の画像IROD2、IROG2の位置とは異なっていることが示される。言い換えると、画像捕捉中に点灯させられる光源の位置が変化する時に、上記光源の反射の画像の位置も変化する。
【0092】
この例では、対応する眼の瞳孔を通して撮像された各々のLEDの反射の画像IROD1、IROG1、IROD2、IROG2の位置が、個人の瞳孔の画像IPD1、IPG1、IPD2、IPG2の照明された区域、すなわち、図3と図5における網線によって表されている点灯している光源の網膜反射と、LED21、22によって照明されていない瞳孔の暗帯との間の境界又は限界ILD1、ILG1、ILD2、ILG2によって表されている。この限界ILD1、ILG1、ILD2、ILG2は、光源の反射の画像IROD1、IROG1、IROD2、IROG2の端縁に一致する。
【0093】
個人が画像捕捉装置10の瞳11の付近を見ている時に、画像捕捉段階が行われる。その場合に、個人の各々の眼の注視方向に従う視線DVD、DVGが、画像捕捉装置10(図7)の瞳11に対して各々の眼OD、OGを接続する各々の観察線DOD、DOGに対して10度未満の閾値以下の角度AD、AGを形成することが好ましい。この条件によって、個人の眼の瞳孔が適切な形で撮像されることを確実なものにすることが可能であり、したがって、個人の2つの眼の各々の眼の上の光源の網膜反射が2つの捕捉画像中で目視可能である。
【0094】
実際には、1組の3つ以上の画像が画像捕捉装置10によって捕捉される。この後に、光源の角膜反射とこれに対応する眼の瞳孔との相対的位置とから個人の注視方向を計算することによって、個人が画像捕捉装置10の瞳11の付近(すなわち、予め規定された区域)を見ている画像が選択される。
【0095】
この例では、この決められた区域は、注視方向内の視線DVD、DVGと観察線DOD、DOGとの間の角度AD、AGがその表面内では上記閾値よりも小さい、画像捕捉装置の瞳の周りに位置している支持体の表面に相当する。
【0096】
複数の画像が選択される場合には、電子及びコンピュータ装置は、採用随意に、これらの画像を平均化するようにプログラムされてもよい。
【0097】
この代わりに、代替策として、画像が画像捕捉装置10の瞳11の付近(すなわち、決められた区域内)を見ている間に、上記少なくとも1つの画像が捕捉されることを確実なものにするために、本発明の方法が画像捕捉段階の前の検証段階を含むように講じることも可能である。個人の注視方向がこの区域内にある画像だけが捕捉される。
【0098】
最後に、さらに、2つのLEDの各々が点灯させられている時に個人の頭部の複数の画像を捕捉することが可能であり、このため、各LEDが点灯している間に捕捉された画像を平均化すること、及び/又は、異なるLEDを連続的に点灯させることに対応する一連の画像を捕捉することが可能となる。この場合には、画像処理によって得られる結果の正確さが改善される。
【0099】
上記画像捕捉の最中に行われる段階c)では、個人の頭部に関連付けられた参照枠内の個人の注視方向に関係する少なくとも1つのパラメータが測定される。
【0100】
この例では、この注視方向パラメータは、排他的に、個人が画像捕捉装置の瞳を注視している間に測定される個人の頭部の姿勢に関係するパラメータである。
【0101】
この例では、この注視方向パラメータは、画像捕捉装置の瞳に向かって下げられている注視を表している頭部の姿勢のパラメータである。眼の目視点が画像捕捉装置の瞳に近いので、頭部の姿勢に関するこのパラメータは注視方向に関連しており、この注視方向は計算によってこのパラメータから直接的に推定されるだろう。
【0102】
この測定は、2つ以上の捕捉画像の各組の中の画像の少なくとも1つに関して行われる。これについてはより詳細に後述する。
【0103】
この測定は、画像を捕捉するのと同時に、又は、画像捕捉前若しくは画像捕捉後の100ms以下の時間間隔内において行われる。
【0104】
段階e’)では、電子及びコンピュータ装置は、上記画像を表している上記信号から、2つの捕捉画像の間の光源の網膜反射画像の移動を決定する。
【0105】
電子及びコンピュータ装置は、その決定された網膜反射の画像の移動を、2つの画像捕捉の間の光源に対する個人頭部の姿勢の間の差異と比較し、個人の眼の屈折特性がそれから推定される。
【0106】
本発明の方法の第1の変形例では、段階h)において、個人の注視方向パラメータの測定の結果が、上記注視方向に対応する視力条件の下での捕捉画像から推定される屈折特性に関連して、電子及びコンピュータ装置の記憶装置内に記憶される。
【0107】
その次に、この電子及びコンピュータ装置は、個人の注視方向と眼の屈折特性とに関連するマップを再構成する。
【0108】
本発明の方法の第2の変形例では、画像捕捉段階中に、電子及びコンピュータ装置は、注視方向パラメータHの値が上記予め規定された視力条件(例えば、近見視)に対応する範囲内に含まれない場合には、画像捕捉を起動しない。その次に、この電子及びコンピュータ装置は、個人が上記予め規定された視力条件にある時の個人の眼の屈折特性だけを決定する。
【0109】
この変形例は、画像を捕捉することとは無関係に、注視方向が得られる時にだけ明瞭に想定されなければならない。このことは、例えば、注視方向パラメータが個人の頭部の姿勢から直接的に推定できる時に当てはまり、及び、個人の頭部の姿勢は、画像捕捉を必要としない測定手段によって測定される。さらに、動画カメラが個人の頭部を連続的に動画撮影することと、適切な瞬間に画像捕捉を起動するために注視方向パラメータが動画撮影画像から同時に計算されることを想定することが可能である。
【0110】
本発明の方法の第3の変形例では、電子及びコンピュータ装置は、捕捉された画像の中から、測定された注視方向パラメータが上記予め規定された視力条件(例えば、近見視)に相当する範囲内に含まれる値を表す画像を選択する。その次に、この電子及びコンピュータ装置は、選択された画像から個人の眼の屈折特性を決定する。
【0111】
実際に且つ好ましくは、両眼OD、OGが同時に照明されている時に、両眼の各々の網膜上の光源の網膜反射画像が同時に捕捉され、段階e’)において、上記光源に対する個人の頭部の各姿勢において同時に捕捉される両眼の網膜反射に関係する上記信号に少なくとも基づいて比較が行われる。
【0112】
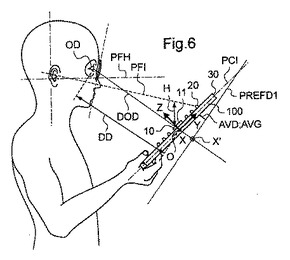
さらに明確に述べると、段階c)では、図6に示されているように、例えば、画像捕捉装置10の瞳11と、例えば遠見視条件の下での水平解剖学的平面PFHに対応する近見視又は中間視のような画像捕捉の視力条件の下での傾斜した解剖学的平面PFIとの間の垂直距離Hの測定が行われる。
【0113】
一変形例では、段階c)において、画像捕捉装置の瞳と、個人が自然な姿勢の状態であり且つ水平線を見ているときにほぼ水平である水平解剖学的平面PFHとの間の距離が測定される。
【0114】
別の変形例では、注視方向パラメータが、直接的に、両眼の角膜反射の画像を表している信号に基づいて電子及びコンピュータ装置によって決定される視線DVD、DVGの座標であるように講じられることがある。
【0115】
次の頭部姿勢パラメータも測定される。
・頭部又は個人の眼OD、OGの一方と画像捕捉装置との間の距離DD、DGであって、例えば、より詳細に述べると、個人の眼OD、OGの回転の中心と画像捕捉装置との間の距離DD、DG。
【0116】
さらに、次の頭部姿勢パラメータの少なくとも1つを測定するように講じられることがある。
・第1の参照平面PREFD、PREFGの水平軸線X’の周りにおける、第1の参照平面PREFD1、PREFG1に対する画像捕捉平面PCIの第1の傾斜角度AVD、AVGであって、第1の参照平面PFEFD1、PREFG1は観察線DOD、DOGに対して垂直であり、観察線DOD、DOGは個人の眼OD、OGのうちの一つを画像捕捉装置10の瞳11に接続する、第1の傾斜角度AVD、AVG。
・上記水平軸線X’に対して垂直である上記第1の参照平面PREFD1、PREFG1の軸線Yの周りにおける、第1の参照平面PREFD1、PREFG1に対する画像捕捉平面PCIの第2の傾斜角度AHD、AHG。
【0117】
したがって、第1の角度AVD、AVGは、画像捕捉平面PCIと水平軸線X’に対して垂直な上記平面との間の交差部分によって画定される線と、参照平面PREFD1、PREFG1と水平軸線X’に対して垂直な上記平面との間の交差部分によって画定される線との間の、上記水平軸線X’に対して垂直な平面内に存在する角度に相当する。
【0118】
したがって、第2の角度AVD、AVGは、画像捕捉平面PCIと軸線Yに対して垂直な上記平面との間の交差部分によって画定される線と、参照平面PREFD1、PREFG1と軸線Yに対して垂直な上記平面との間の交差部分によって画定される線との間の、上記軸線Yに対して垂直な平面内に存在する角度に相当する。
【0119】
注視方向H及び個人の頭部の姿勢のこれらのパラメータを測定するために、個人の頭部に、例えば、国際公開第2008/132356号に説明されている位置識別システムのような位置識別システムが取り付けられてもよい。この位置識別システムは、着用者の頭部上に直接的に保持されてもよく、又は、眼鏡レンズを含まない眼鏡フレーム上に配置されてもよい。
【0120】
姿勢に関する様々なパラメータ、特に着用者の頭部と画像捕捉装置との間の距離に関する様々なパラメータを計算する方法が、その文献に説明されている。
【0121】
解剖学的平面PFHが、その文献において説明されているようなフランクフルト平面であることが有利である。個人の頭部が自然な姿勢の状態であり且つ個人が画像捕捉装置を見ており無限遠は見ていない時に、その傾斜した解剖学的平面PFIはフランクフルト平面に相当する。
【0122】
特に、従来の校正段階は、個人が遠方を見ている間にフランクフルト平面の位置が決定されられている最中に行われる。この場合に、フランクフルト平面はほぼ水平である。個人の頭部が傾斜している時には、さらに、上記文献に説明されている位置識別システムの垂直位置識別要素の画像の幾何学的特徴からフランクフルト平面の位置を推定することが可能である。例えば、これは、その垂直位置識別要素上に示されているパターンの暗縞(black strip)間の間隔に関係するだろう。
【0123】
上記文献は、さらに、個人の頭部の参照枠内における個人の眼の回転中心の位置を決定する方法も説明している。この決定は、さらに、校正段階として行われてもよい。
【0124】
個人が画像捕捉装置の瞳を注視する時には、眼の回転中心の位置が頭部の参照枠内においてすでに決定されているので、且つ頭部の位置が画像捕捉の参照枠内においてすでに決定されているので、画像捕捉参照枠内における眼の回転中心の位置をそれから推定することが可能である。個人が画像捕捉装置の瞳を見つめる場合には、個人の眼の注視方向と、傾斜フランクフルト平面に対する相対的な画像捕捉装置の瞳の位置とを、それから推定することが可能である。
【0125】
一変形例では、2005年にSpringerによって出版された書籍「Analysis and modeling of faces and gestures」においてM.Oka他によって発表された論文「Real−time modeling of face deformation for 3D head pose estimation」(p308−320)に説明されている方法を使用して着用者の頭部の姿勢を3次元で推定する方法が使用されてもよい。
【0126】
さらに、米国特許出願公開第2003/0169907号明細書で説明されている方法のような、注視方向パラメータを決定するための当業者に公知の「視線追跡(eye tracking)」方法を使用することを想定することも可能である。
【0127】
典型的には、視線追跡法では、個人の眼の各々の網膜上の光源の反射の座標を決定するために画像が処理される。この段階は、例えば、画像と、反射に関する理論的パターンとの間の畳み込み(convolution)によって行われる。反射の座標が、例えば、反射を表す画像の画素座標によって決定されるだろう。
【0128】
瞳孔の端縁が、例えば、勾配とハフ変換とによって輪郭を検出することによって検出され、このようにして瞳孔の中心の座標と瞳孔の直径とを決定することを可能にする。
【0129】
校正段階は、さらに、光源の反射の位置と瞳孔の中心の座標とを注視方向に関する角度に変換する多項式関係又は他の関係を決定することも可能にする。これを行うために、この校正段階中に、個人が画像捕捉参照枠内の既知の3D位置の照準点(sighting point)、又は、少なくとも上記参照枠内の既知の角度位置の照準点を注視する。
【0130】
別の校正方法が、個人の頭部に関連付けられている参照枠に対して平行である平面内の2次元の瞳孔の位置を計算することにある。特に、個人の頭部に取り付けられている参照枠に対して平行なこの平面は、上記フランクフルト平面に対して垂直な額平面(forehead plane)であってよい。
【0131】
電子及びコンピュータ装置が、さらに、測定された頭部姿勢パラメータと注視方向パラメータとを記憶装置内に記憶することが有利である。したがって、屈折特性は、こうして計算されることが可能であり、おそらくは、これらの頭部姿勢パラメータの関数として後で矯正されることが可能である。
【0132】
例えば、個人の注視方向における視線DVD、DVGが、個人の眼を画像捕捉装置の瞳に接続する観察線DOD、DOGに対して角度シータをなす時には、捕捉画像上の個人の瞳孔の画像は円形ではなく、むしろ楕円形である。この場合に、コンピュータは、瞳孔の実際の形状、したがって光源の画像の反射の実際の形状を再構成するために、上記角度シータのコサインに等しい係数で楕円の小径を割り算するようにプログラムされている。このことは、対応する画像処理の終了時に屈折特性をより正確に決定することを可能にする。
【0133】
実際には、段階e’)において、電子及びコンピュータ装置は、光源の異なる位置に対応する2つの画像における光源の網膜反射画像の移動方向を、2つの対応する画像捕捉の間の光源自体の移動方向と比較する。
【0134】
図2から図5に示されている例では、光源はLED21の位置からLED22の位置に移動し、すなわち、個人の頭部の参照枠内においてほぼ水平である軸線に沿って、着用者の頭部の参照枠内において左から右に移動する。
【0135】
個人の眼の各々の瞳孔を通過して撮像されたLED22の網膜反射の画像IROD2、IROG2は、LED21の網膜反射の画像IROD1、IROG1に対して参照枠内においてわずかに左に片寄っている。
【0136】
したがって、網膜反射の画像IROD1、IROG1は、LEDの移動軸線に対して平行である眼の軸線に沿って、光源の移動方向とは反対向きの方向に移動させられる。この例では、これらの軸線はほぼ水平である。
【0137】
網膜検影法の原理にしたがって、電子及びコンピュータ装置は、LEDの移動軸線に対して平行である眼の軸線に対して垂直な眼の経線に沿って、すなわち、この例では垂直の経線に沿って、個人の眼OD、OGが負の屈折異常(すなわち、近視)を示すということを、この比較から推定するようにプログラムされている。
【0138】
反射の画像の移動が光源の移動と同じ方向に生じる時には、電子及びコンピュータ装置は、対応する経線に沿って、個人の眼OD、OGが正の屈折異常(すなわち、遠視)を示すということを、この比較から推定するようにプログラムされている。
【0139】
この例では、測定装置の平面内のLED20の構成が、支持体30の前面の上にLEDが一直線に配列されている4つの方向の各々に配置されている少なくとも2つのLEDを連続的に点灯させることによって、第1の経線から45度に方向配置されている2つの経線とその第1の経線から90度に方向配置されている1つの経線とを含む眼の4つの経線に沿って、各々の眼の屈折異常の符号を決定することを可能にする。
【0140】
一変形例では、段階e)において、電子及びコンピュータ装置は、光源の網膜反射の画像IROD1、IROG1、IROD2、IROG2の幅を決定するために、少なくとも1つの画像を表している信号、好ましくは各々の画像を表している信号を使用して、個人の眼の屈折異常に関する値をそれから推定する。
【0141】
この例では、光源がLEDなので、画像は円形の形状である。
【0142】
したがって、乱視を示さない眼の場合には、光源の網膜反射の画像は円形の形状である。この場合には、網膜反射の画像の幅は反射の直径に一致する。
【0143】
眼が実際に乱視である場合には、網膜反射の画像が楕円形の形状を示す。この場合には、最大の直径を有する楕円の軸が、絶対値において最大の屈折異常を示す眼の経線に一致する。この場合には、網膜反射の画像の幅が上記楕円形の最大直径に一致する。
【0144】
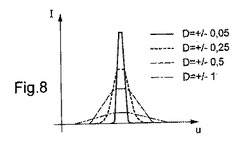
この幅を決定するために、電子及びコンピュータ装置は、対応する光源の網膜反射の明度(intensity)の空間分布を決定するために各々の捕捉画像を解析する。この明度の空間分布が図8に概略的に示されている。図8の各々の曲線が、眼によって反射される光の比率に相当する。
【0145】
各々の曲線の水平域(plateau)上に位置している点が、瞳孔の表面積全体に及ぶ反射に相当し、一方、各々の曲線のスロープ上に位置している点が、図3と図5とに示されているような眼の瞳孔内の目視可能な端縁を有する反射に相当する。明度の空間分布が、説明文においてジオプターで表現されている屈折異常Dの異なる値に関して、この図に示されている。
【0146】
この例では、明度の空間分布は、光源の反射によって照明される瞳孔の面積のパーセンテージに等しい。
【0147】
このパーセンテージを決定するために、電子及びコンピュータ装置は、眼の瞳孔の形状と、光源の反射によって照明されている眼の瞳孔の画像の区域と、個人の眼の瞳孔の暗帯(dark zone)との間の境界又は限界の位置とを決定する。このパーセンテージは、上述したように、眼の瞳孔の形状が正確に分かっている時に、向上した精度で決定される。
【0148】
その次に、電子及びコンピュータ装置は、例えば明度の空間分布の半分の高さにおける幅(すなわち、半値全幅)に等しいものとして、各々の明度分布に対応する網膜反射の直径を決定する。
【0149】
網膜反射の形状が楕円形である場合、電子及びコンピュータ装置は、その楕円の長軸に沿った明度の空間分布を決定し、それから網膜反射の幅を推定する。
【0150】
実際には、眼の実際の品質と光源の寸法とが、捕捉画像上に観察される明度の空間分布の変化を生じさせるだろうし、特に、上記分布を拡大するだろう。電子及びコンピュータ装置が、特に校正段階によって、こうした変化の矯正を行うようにプログラムされることが有利だろう。この校正段階は、例えば、当業者に公知である仕方で、既知の収差を表す人工の眼の補助によって行われるだろう。
【0151】
電子及びコンピュータ装置が、その空間分布の一部分を各々が示す、複数の捕捉画像からの反射の明度の空間分布を再構成することが有利であり、各捕捉画像が分布の一部を示す。特に、一連の捕捉画像が、完全に視覚化されるように且つ光源の網膜反射の明度の完全な空間分布を得るように、光源の網膜反射の画像の移動が追跡されることを可能にするように講じられてもよい。
【0152】
したがって、電子及びコンピュータ装置は網膜反射の画像の幅を非常に正確に決定する。
【0153】
光源の網膜反射の画像の幅Lが次の関係を満たし、
L=E×(−2×D×DPR+DPR/DSP−1)
前式中で、
Eは、想定されている個人の眼の瞳孔の直径であり、
DPRは、画像捕捉装置の瞳と個人の眼の網膜との間の距離であり、
DSRは、光源と個人の眼の網膜との間の距離であり、
Dは、ジオプター単位での眼の屈折異常の値である。
【0154】
したがって、屈折異常の値Dは、次の式を使用して計算できる。
D=(L/E−DPR/DSP+1)/(−2DPR)
【0155】
個人の眼の瞳孔の直径は、電子及びコンピュータ装置の中に計算パラメータとしてユーザによって入力されてもよいし、又は、例えば視線追跡法の上述の画像処理を行うことによって捕捉画像から測定されてもよい。
【0156】
第1の選択肢では、ユーザは、瞳孔のサイズに関する予め規定された平均値を入力する。第2の選択肢では、画像処理用の電子システムが、一連の記録画像の中の少なくとも1つの画像における個人の少なくとも片方の眼の瞳孔を識別し、その直径を測定する。この直径から、この電子システムは、このように測定された直径に換算係数(scale factor)を乗算することによって、瞳孔の実際のサイズを推定する。この換算係数は、例えば、国際公開第2008/132356号に説明されているような位置識別システム及びその方法を使用することによって決定される。
【0157】
画像捕捉装置の瞳と個人の眼の網膜との間の距離DPRが、段階c)で測定された姿勢パラメータから決定される。これらの姿勢パラメータは、特に、個人の眼OD、OG各々の回転中心と画像捕捉装置との間の距離DD、DGを含む。
【0158】
眼の網膜と眼の回転中心との間の距離が約11mmに等しいので、画像捕捉装置の瞳と個人の眼の網膜との間の距離DPRは、個人の眼OD、OGの回転中心と画像捕捉装置との間の距離DD、DGに11mmの距離を加えた距離に等しい。
【0159】
光源と個人の眼の網膜との間の距離DSRが、画像捕捉装置の瞳と個人の眼の網膜との間の距離DPRと、画像捕捉装置の瞳に対する、画像が捕捉されていた最中に点灯させられていた光源の既知の位置とから、電子及びコンピュータ装置によって計算される。
【0160】
この説明されている例では、距離DPRと距離DSRとが非常に類似しており、第1の近似値では、これらは等しいと見なされるだろう。
【0161】
こうして、屈折異常の値、すなわち、眼の球面屈折力又は円柱屈折力が、上記の式を使用して計算される。
【0162】
本発明の方法の実施を促進するために、点灯されている光源の網膜反射のサイズ及び形状に関する情報を可能な限り多く与える、すなわち、網膜反射の端縁を可能な限り明瞭に視覚化することを可能にする、個人の眼の画像捕捉を行うことが有利である。
【0163】
例えば、第1の組の画像の捕捉が、画像捕捉装置10の瞳11の最も近くに配置されているLEDから始めてそれから漸進的に離れる形で移動する形で、画像捕捉装置10の瞳11の両側に配置されている一連の交互のLEDのうち、単一の整列方向に配置されているLEDを連続的に点灯させることによって行われる。例えば、同じ側の連続的に点灯させられる2つのLEDの間のステップサイズ(step−size)が、検討されている整列方向に一致するLEDすべてによって迅速に走査するために、各々の反復毎に2倍にされてもよい。
【0164】
その後、反射の明度が平均的にその反射の最大明度の50%と90%に等しいLEDだけを点灯させることによって、後続の画像捕捉が行われる。反射の明度がその反射の最大明度の50%に等しい時には、反射の端縁、すなわち、その反射によって照明されている眼の瞳孔の区域と照明されていない眼の瞳孔の区域との間の境界又は限界が、眼の瞳孔を2つの等面積の区域に分割する。これは、画像捕捉装置の瞳の両側において整列させられている4つのLEDを点灯させることに相当する。
【0165】
したがって、その反射の幅がより正確に決定されることが可能である。
【0166】
眼の乱視を決定するために、電子及びコンピュータ装置は、反射の形状を解析し、その反射の明度の空間分布を決定し、ひいては、眼の異なる経線に沿って、例えば任意に選択され且つ0度、45度、90度の角度で互いに対して配置されている3つの経線に沿って、屈折異常の値を決定する。
【0167】
その後、電子及びコンピュータ装置は、屈折異常に関する最小値と最大値とに相当する眼の経線に沿った他の測定を行い、すなわち、楕円の最小直径と最大直径とを決定する。楕円の直径がその楕円の長軸の周りと短軸の周りとではわずかにしか変化しないので、電子及びコンピュータ装置は、この決定から、2つの対応する直径に沿った屈折異常に関する正確な値を推定する。
【0168】
最後に、電子及びコンピュータ装置は、その楕円の長軸のどちらか一方の側で45度においてその楕円の直径を決定する。その楕円の直径の値が、長軸に対して45度の角度に位置している軸線の周りで急激に変化するので、この測定は乱視の軸線を正確に決定することに役立つ。したがって、乱視が非常に正確に決定される。
【0169】
上記では、個人は矯正眼鏡レンズを含む眼鏡フレームを着用していない。したがって、得られる屈折特性の値が、個人自体の眼に対応する値である。一変形例では、例えば既知の屈折力と偏角とを有する眼鏡レンズを含む視力矯正機器をオペレータが上記個人の顔の上に置くことを想定することが可能である。
【0170】
こうした状況では、電子及びコンピュータ装置は、捕捉画像を表す信号、及び/又は、視力矯正機器の屈折力と偏角との関数として上記信号から推定される屈折特性を矯正するようにプログラムされる。
【0171】
例えば、特定の屈折力の視力矯正球面レンズという単純な状況では、それは、上述の方法によって決定される屈折異常の値にその屈折力を加えることに等しい。この2つの値の合計が、個人の眼の屈折特性を与える。
【0172】
その次に、個人の眼の過剰矯正又は矯正不足を決定するために、本発明の方法を再度適用することも可能である。
【0173】
当然であるが、個人は、視力矯正レンズを含まない眼鏡フレームを着用していてもよい。このようなフレームは、例えば個人の頭部の1つ又は複数の姿勢パラメータを決定するために使用される位置識別システムのための支持体の役割を果たす。
【0174】
画像捕捉装置の参照枠内の個人の注視方向が、画像が捕捉されている間は同一のままであることが好ましい。このために、電子及びコンピュータ装置は、個人の眼が2つの画像捕捉の間にわずかしか動かないように、例えば100msの間隔で、非常に短い間隔で画像捕捉を起動する。
【0175】
本発明は、あらゆる態様において上述の実施形態に限定されるものではなく、当業者は、本発明の着想にしたがって上記の実施形態にどのように変更を加えるかを理解する。
【0176】
特に、測定装置は、変形例において、少なくとも1つの超音波発信器と少なくとも1つの超音波受信器とを備える超音波測定装置を含むことがあり、又は個人の頭部に関係する姿勢パラメータを測定するための電磁センサを有する測定装置を含むことがある。
【0177】
一変形例では、段階e’)において、上記少なくとも1つの捕捉画像が、光源20の網膜反射の画像IROD1、IROG1、IROD2、IROG2の輝度の分布を決定するために使用され、個人の眼OD、OGの上記屈折特性Dは、この輝度の分布の関数として決定される。
【0178】
その次に、この屈折特性は、1997年に、「Optometry and Vision Science」Vol.174、pp.472−482において発表された論文に説明されている写真屈折検査法のような従来の写真屈折検査法によって決定される。眼の屈折特性、この場合には屈折異常の符号及び/又はその屈折異常の値は、反射の画像の輝度の分布から決定される。これは、従来の校正段階を使用して実現される。
【0179】
網膜検影法によって屈折特性を計算する方法に関して説明した様々な具体例とその変形例が、同様の態様において、写真屈折検査法の屈折特性を計算する方法を使用する方法に適用する。
【0180】
例えば、上記画像捕捉段階中に、個人の両眼の網膜上の上記光源の網膜反射の少なくとも2つの画像を捕捉し、個人の2つの眼の一方の眼の上記屈折特性を一つの画像から決定し、且つ、個人の他方の眼の屈折特性を他方の画像から決定することによって、本発明の方法を実施することを想定することが可能である。
【0181】
別の変形例では、本発明の方法は、次の段階を実行することによって行われる心理物理的な試験を含む。
r)画像の空間周波数をフィルタリングするための特定のカットオフの周波数フィルタによるローパスフィルタリングに相当する不鮮明性を示す画像を個人の眼の前方に表示する段階と、
t)段階s)で行われた心理物理的試験の結果に関連して決定された屈折特性と、段階r)で使用されたローパスフィルタのカットオフ周波数の値とを記憶装置内に記憶する段階と、
u)画像フィルタの異なるカットオフ周波数に関して、屈折特性を決定するための画像捕捉段階と段階r)と段階t)と共に、少なくとも段階b)及び段階c)を繰り返す段階。
【0182】
心理物理的試験が、さらに、画像の不鮮明性の個人による認知を特徴付ける段階s)も含み、段階u)において、この試験の結果が、さらに、対応するフィルタのカットオフ周波数に関連して記憶装置内に記憶されることが好ましい。
【0183】
このために、測定装置100は、表示装置で不鮮明性を表す画像を生成する手段と、画像を表示するための装置とを含む。例えば、この表示手段は、上述の装置のハウジング内に組み込まれているスクリーンによって構成されており、且つ、上記不鮮明画像を表示するようになっている。
【0184】
例えば、この不鮮明画像は電子及びコンピュータ装置によって生成される。この不鮮明画像は、例えば英数字文字を表す画像のような鮮明な画像の空間周波数の一部分を空間的にフィルタリングすることによって得られる。電子及びコンピュータ装置は、予め規定されたカットオフ周波数を有するローパスフィルタをその鮮明な画像に対してデジタル的に適用することによって不鮮明画像を決定する。
【0185】
さらに、スクリーン表示信号のアナログ的なフィルタリングによって不鮮明画像が得られることを想定することも可能である。
【0186】
一般的に、不鮮明画像は、一変形例では、特に不鮮明画像が得られることを可能にする任意の画像処理によって、当業者に公知の任意の方法によって得られるだろう。
【0187】
鮮明な画像が複数の異なる空間周波数成分に細分化されてもよい。
【0188】
フィルタリング中は、高い空間周波数を示す成分の振幅が減衰させられる。したがって、画像上に表示された英数字文字の輪郭が拡散するように見える。
【0189】
使用されるローパスフィルタは、その閾値よりも高い画像の空間周波数が、その閾値よりも低い画像の空間周波数よりもより大きく減衰させられる閾値に相当するカットオフ周波数によって特徴付けられる。したがって、このカットオフ周波数は、識別されることが可能な不鮮明画像の2つの詳細部分の間の最小距離に相当する。
【0190】
この不鮮明画像はリアルタイムで計算されてもよく、又は、電子及びコンピュータ装置内の画像ライブラリ内に記録されていてもよい。
【0191】
電子及びコンピュータ装置は、計算された不鮮明画像を表示することをスクリーンに生じさせるためにスクリーンと通信する。
【0192】
不鮮明画像の認知を特徴付ける段階s)は、例えば、個人に対して、表示画像の不鮮明性のこの個人の認知に関する個別的な質問を問うことにある。例えば、問われる質問は、個人が画像における不鮮明性を検出するか否かを判定すること、及び、不鮮明性の結果として個人によって感じられる困難性を評価すること、及び/又は、不鮮明画像によって表されている英数字文字における可読性の損失を評価することを決定するだろう。
【0193】
問われた質問に対する個人の回答が、表示画像の不鮮明性の度合いに関する不鮮明性の個人の認知を特徴付ける。この回答は、段階r)で使用されたローパスフィルタのカットオフ周波数の値と共に、決定された屈折特性に関連して電子及びコンピュータ装置の記憶装置内に記憶される。
【0194】
これに加えて、本発明による方法では、少なくとも段階b)及び段階c)が、屈折特性を決定するための画像捕捉段階と、画像フィルタに関する異なるカットオフ周波数における段階r)から段階t)と共に、繰り返される。
【0195】
その次に、画像の不鮮明性の度合いが変化するのに応じて、不鮮明性の認知がどのように変化するか、及び、個人の眼の屈折特性がどのように変化するのかということを決定することが可能であることが有利である。
【0196】
両眼の屈折特性が少なくとも1つの画像(例えば単一のグループの画像)から決定される本発明の一実施形態が、詳細に上述されている。
【0197】
変形例では、
上記画像捕捉段階中に、少なくとも2つの画像が捕捉され、この各々の画像は、個人の両眼の網膜上の上記光源の2つの網膜反射の画像を含み、
これら2つの画像の一方に基づいて、個人の2つの眼の一方の眼の上記屈折特性が決定され、他方の画像に基づいて、個人の眼の他方の眼の屈折特性が決定される
ことを想定することが可能である。
【0198】
例えば、1つのグループの画像が捕捉されることと、一方の眼の屈折特性を決定するためにこれらの画像の幾つかが処理され、他方の眼の屈折特性を決定するためにこれらの画像の残りが処理されることを想定することが可能である。本発明の方法の残り部分は不変のままである。
【0199】
こうした状況において、各々の眼に関して処理画像の選択を精緻なものにすることが可能であり、このことは、例えば、反射の明度がその反射の最大明度の50%と90%とに平均的に等しい捕捉画像を各々の眼に関して明確に選択することを可能にする。
【0200】
これは、特に2つの眼が互いに非常に異なる度合いの屈折異常を示す場合に有用である。
【技術分野】
【0001】
本発明は、概して個人の眼の光学特性を測定する方法に関する。さらに明確に述べると、本発明は、個人の両眼の屈折特性の少なくとも1つを自動的に測定するための方法に関する。
【0002】
本発明は、さらに,この方法が実施されることを可能にする測定装置にも関する。
【背景技術】
【0003】
個人の眼の屈折特性は、個人の視力を矯正するための眼鏡を作成することにおいて不可欠な役割を果たす重要なものである。
【0004】
個人の眼の屈折特性を決定するための様々な方法と装置が現時点で知られている。これらの方法と装置は、特に、写真屈折検査法(photorefraction)と、いわゆる「網膜検影法」とに基づいている。
【0005】
しかし、これらの方法とその関連装置は、実行において時間浪費的である。
【0006】
観察者が裸眼で上記網膜反射を観察するために使用する手動装置は、あまり正確ではない。検出器を使用して精度が改善されているが、個人の眼の各々が個別的に測定される必要があるので、その測定を行うためには長い時間を要する。個人の2つの眼の片方の眼だけからの網膜反射だけが1度に観察される。
【0007】
これに加えて、既知の装置は、例えば、額のための受け台によって、及び、顎の支持体によって、及び/又は、例えば個人が注視(gaze)する目標を有することによって注視方向を制約するための手段によって、画像捕捉装置に関連付けられた参照枠内において個人の頭部及び/又は眼に対して予め規定された姿勢を強制するための拘束手段を含む。
【0008】
したがって、こうした既存の方法と装置を使用して行われる屈折特性の測定は、個人の姿勢と注視方向とに関して自然な状態では行われず、したがって、個人の両眼視力が考慮に入れられることを可能にしない。
【0009】
例えば、こうした測定は、近見視条件又は中間視条件の下での個人の眼の屈折特性を測定することを可能にしない。
【0010】
あいにく、眼の屈折特性は、視力条件(vision condition)と、個人によって行われる作業と、個人の姿勢及び注視方向とに基づいて、著しく変化しうる。
【発明の概要】
【発明が解決しようとする課題】
【0011】
本発明の目的は、個人が非拘束的で快適で自然な姿勢をとっている間に、且つ、決定された視力条件の下で、迅速且つ確実な形で個人の両眼の屈折特性を測定することを可能にする方法及び装置を提供することである。この自然な姿勢は、個人にとって人間工学的に最良であり且つ最も疲れが少ない姿勢に該当する。言い換えると、この自然な姿勢は、個人が通常とる姿勢に該当する。
【課題を解決するための手段】
【0012】
このために、本発明は、個人の両眼の屈折特性の少なくとも1つを自動的に測定する方法を提供し、この方法は、
a)各々の捕捉された画像をその画像を表す信号に変換するようになっている画像捕捉装置に関連付けられた参照枠内の既知の位置の少なくとも1つの光源によって両眼を照明する段階と、
b)画像捕捉装置に関連付けられたその参照枠内において、個人の要望にしたがって、その個人の頭部の少なくとも1つの姿勢を調整する段階と、
c)個人の頭部に関連付けられた参照枠内において、その個人の注視方向に関連付けられた少なくとも1つの注視方向パラメータを測定する段階と、
d)個人の両眼の網膜上での上記光源の網膜反射の少なくとも1つの画像を捕捉するために上記画像捕捉装置を使用する段階と、
f)段階d)において捕捉された上記少なくとも1つの画像から、個人の眼の各々について上記屈折特性を決定する段階と、
h)決定された屈折特性に関連して、段階d)の画像捕捉中に測定された個人の注視方向に関連付けられた注視方向パラメータを記憶する段階
とを含む。
【0013】
本発明は、さらに、予め規定された視力条件の下、個人の両眼の屈折特性の少なくとも1つを自動的に測定する方法を提供し、この方法は、
a)各々の捕捉された画像をその画像を表す信号に変換するようになっている画像捕捉装置に関連付けられた参照枠内において、上記個人の要望にしたがって、個人の頭部の少なくとも1つの姿勢を調整する段階と、
b)画像捕捉装置に関連付けられた上記参照枠内の既知の位置の少なくとも1つの光源によって両眼を照明する段階と、
c)個人の頭部に関連付けられた参照枠内において、その個人の注視方向に関連付けられた少なくとも1つの注視方向パラメータを測定する段階と、
i)個人の両眼の網膜上での上記光源の網膜反射の少なくとも1つの画像を上記画像捕捉装置によって捕捉する段階であって、この画像が、画像捕捉平面内において、上記予め規定された視力条件に対応する範囲内に置かれている上記注視方向パラメータの値に関して捕捉される、段階と、
j)上記少なくとも1つの捕捉画像から、上記予め規定された視力条件における個人の各々の上記屈折特性を測定する段階
とを含む。
【0014】
したがって、個人の各々の眼の屈折特性、例えば、屈折異常の符号(sign)、又は、上記屈折異常の値、すなわち、その球面及び/又は円柱屈折力が個人にとって自然で快適である姿勢において測定され、これによって、個人の実際の視力条件の下で上記屈折特性が決定されることが可能となる。このことが、こうした測定の精度を向上させる。さらに、この屈折特性は、個人の注視方向に関連付けされた注視方向パラメータに関連している。
【0015】
用語「注視方向に関連付け(link)された」は、上記注視方向パラメータ及び上記個人の注視方向の一方が他方から計算されることを可能にする、上記注視方向パラメータと上記個人の注視方向との間に数学的関係が存在するということを意味するために使用されている。
【0016】
この関連付け(link)は、直接的であってもよく、この場合には、注視方向パラメータが典型的には眼の方向を追跡するために画像認識を使用することにあり、又は、間接的であってもよく、この場合には、測定されたパラメータが頭部に対して排他的に関係し且つ頭部の1つ又は複数の位置及び/又は方向座標にある。このことは、本発明の特定の具体例において、より詳細に後述されている。
【0017】
したがって、この方法は、眼の屈折特性の測定値の各々に関連する確立されるべきマップ(map)が、対応する個人の注視方向に関連付けられることを可能にする。このことは、特に、遠見視に関連付けられた屈折特性値から近見視又は中間視に関連付けられた屈折特性値を識別することを可能にする。
【0018】
用語「近見視」は、本明細書において、25センチメートル(cm)から69cm離れている物品を個人が注視している条件を意味するために使用されており、及び、用語「中間視」は、70cmから199cm離れている物品を個人が注視している条件を表すために使用され、及び、用語「遠見視」は、少なくとも200cm離れている物品を個人が注視している条件を表すために使用される。
【0019】
個人は、手動によって若しくは遠隔操作によって、又は、この個人が要望するように調整が行われるように指示を与えることによって、画像捕捉装置の位置と方向を調整する。
【0020】
代替的に、画像捕捉装置の位置が固定されている場合、個人は、装置に面している間、その個人自身が要望する通りの姿勢をとる。
【0021】
この方法では、個人の両眼の屈折特性は同時に測定される。したがって、測定は容易であり、且つ、迅速に実行されることが可能である。この方法は、さらに、調節システムと両眼視力における眼の輻輳(convergence)との実態を考慮に入れることを可能にする。
【0022】
本発明の第1の有利な特徴によって、さらに、次の段階、すなわち、
e)光源の網膜反射の画像の幅又は輝度分布を上記少なくとも1つの捕捉画像から決定し、及び、上記幅又は上記輝度分布の関数として個人の両眼の各々の上記屈折特性を決定する段階
が提供される。
【0023】
こうした状況では、有利であることに、両眼が同時に照明され、両眼の網膜上の光源の網膜反射の画像が同時に捕捉され、段階e)において、光源の網膜反射の画像の幅又は輝度分布は、少なくとも、上記光源に対する個人の頭部の各々の姿勢において同時に捕捉される両眼の網膜反射に関係する上記信号から決定される。
【0024】
本発明のこの実施態様は、有利であることに、写真屈折検査法によって上記屈折特性を決定することを可能にする。
【0025】
本発明の別の有利な特徴によって、両眼が同時に照明され、両眼の網膜上の光源の網膜反射の画像が同時に捕捉され、段階e)において、光源の網膜反射の画像の幅又は輝度分布は、少なくとも上記光源に対する個人の頭部の各々の姿勢において同時に捕捉される両眼の網膜反射に関係する上記信号から決定される。
【0026】
その後、光源の網膜反射の画像の幅又は輝度分布から個人の眼の各々の屈折異常についての値が推定される。
【0027】
このことが、各々の眼の屈折異常に関する正確な値を決定することを可能にする。
【0028】
本発明の別の有利な特徴によって、個人の2つの眼の各々の網膜上の上記光源の網膜反射の少なくとも2つの画像が捕捉され、この方法は、さらに、
e’)上記少なくとも2つの捕捉画像から、光源の網膜反射の画像の移動を決定する段階
を含み、
個人の両眼の各々の上記屈折特性は上記移動の関数として決定される。
【0029】
本発明の別の有利な特徴によって、
2つの画像捕捉中に、異なる上記光源に対する個人の頭部の姿勢について、
段階c)において、上記2つの画像捕捉中に、個人の頭部の少なくとも一つの姿勢パラメータが画像捕捉装置の参照枠内において測定され、
段階e’)において、決定された網膜反射の画像の移動が、段階c)において測定された上記頭部姿勢パラメータの関数として、2つの画像捕捉の間の光源に対する個人の頭部の姿勢の相違と比較され、
個人の眼の各々の眼の上記屈折特性はこの比較から推定される。
【0030】
本発明の実施は、有利であることに、網膜検影法によって上記屈折特性を決定することを可能にする。
【0031】
この場合に、有利であることに、個人の各々の眼の屈折異常の符号は上記比較から推定される。
【0032】
本発明の別の有利な特徴によって、両眼が同時に照明され、両眼の網膜上の光源の網膜反射の画像が同時に捕捉され、段階e’)において、光源の網膜反射の画像の移動が、少なくとも上記光源に対する個人の頭部の各々の姿勢において同時に捕捉される両眼の網膜反射に関係する上記信号から決定される。
【0033】
次に示す頭部姿勢パラメータの少なくとも1つが測定されることが有利である。
・個人の頭部又は片方の眼と画像捕捉装置との間の距離、
・画像捕捉装置の瞳と、個人が自然な姿勢の状態にあり且つ画像捕捉装置に眼を向けているときに傾斜している個人の解剖学的平面との間の垂直距離であって、上記平面は、個人が自然な姿勢の状態にあり且つ水平に見ているときにほぼ水平である水平解剖学的平面に相当する垂直距離、
・画像捕捉装置の瞳と、個人が自然な姿勢の状態にあり且つ水平に見ているときにほぼ水平である水平解剖学的平面との間の距離、
・第1の参照平面の水平軸線の周りにおける、第1の参照平面に対する画像捕捉平面の第1の傾斜角度であって、第1の参照平面は、この画像捕捉装置の瞳に個人の一方の眼を接続する線に対して垂直である、第1の傾斜角度、及び、
・上記水平軸線に対して垂直なこの第1の参照平面の軸線の周りにおける、上記第1の参照平面に対する画像捕捉平面の第2の傾斜角度。
【0034】
一例を示すと、個人の頭部に関するこれらの姿勢パラメータは、その個人が画像捕捉装置を保持する態様とは無関係に、画像捕捉装置に対する着用者の頭部の位置が正確に決定されることを可能にする。
【0035】
画像捕捉中に、上記光源と上記画像捕捉装置とが上に取り付けられている支持体が、上記個人によって手で支えられることが好ましい。このことは、個人が自分が自然で快適であると分かる状態にあることを確実なものにすることを可能にする。
【0036】
本発明の別の有利で非限定的な特徴によって、個人が画像捕捉装置の瞳の付近を見つめている間、すなわち、その瞳の付近の定められた区域内を見ている間に、上記少なくとも1つの画像が捕捉されることを検証するための検証段階が画像捕捉段階の前又は後に行われる。
【0037】
本発明の別の有利で非限定的な特徴によって、上記注視方向パラメータは、排他的に、個人が画像捕捉装置の瞳を注視している間に測定される個人の頭部の姿勢パラメータである。
【0038】
本発明の別の有利で非限定的な特徴によって、少なくとも1つの画像を捕捉する前の準備段階中に、視力矯正機器が上記個人の顔の上に配置され、上記捕捉画像を表す信号及び/又は上記信号から推定された屈折特性は、この視力矯正機器の屈折力(power)と偏角(deflection)とに応じて矯正される。
【0039】
その後、本発明の方法の画像捕捉中に捕捉される画像は、例えば眼鏡フレームのリムの下端縁と個人の各眼の瞳孔との間の高さのような、個人の他の自然形態学的(physico−morphological)パラメータを決定するために処理されることが可能である。
【0040】
本発明の別の有利で非限定的な特徴では、段階c)において、個人の注視方向が、両眼の角膜反射の画像を表す信号から計算される。
【0041】
これに加えて、本発明の方法の一変形例が、
r)少なくとも1つの画像の捕捉の前又は最中に、個人の眼の前に画像を表示し、この画像は、上記画像の空間周波数をフィルタリングするための特定のカットオフの周波数フィルタによるローパスフィルタリングに相当する不鮮明性を表す段階と、
t)段階r)において使用されたローパスフィルタのカットオフ周波数の値に関連して決定された屈折特性を記憶装置内に記憶する段階と、
u)画像フィルタの様々なカットオフ周波数に関して、少なくとも段階b)、c)、d),f)、r)及びt)、又は、段階b)、c)、i)、j)、r)及びt)を繰り返す段階
とを含む。
【0042】
したがって、この方法は、段階r)において使用されたフィルタのカットオフ周波数の様々な値に関して、ひいては画像における様々な度合いの不鮮明性(fuzziness)に関して、当該不鮮明画像を見る条件の下、個人の眼の屈折特性を測定することを可能にする。
【0043】
その後、有利であることに、個人の眼の屈折特性が画像不鮮明性の度合いの変化に応じてどのように変化するかを決定することが可能である。
【0044】
さらに、その画像における様々な度合いの不鮮明性に関して個人による不鮮明性の認知を特徴付けることと、不鮮明性の認知が画像の不鮮明性の度合いの変化に応じてどのように変化するのかを決定することとが可能である。
【0045】
したがって、この変形例は、心理物理的な試験が行われることを可能にする。
【0046】
本発明の別の変形例では、
・上記画像捕捉段階中に、少なくとも2つの画像が連続的に捕捉され、これらの画像の各々は、個人の両眼の網膜上の上記光源の2つの網膜反射の画像に相当し、
・上記2つの画像の一方から個人の2つの眼の一方の上記屈折特性を決定し、且つ、他方の画像から個人の他方の眼の屈折特性を決定する。
【0047】
本発明は、さらに、個人の両眼の屈折特性の少なくとも1つを自動的に測定するための装置を提供し、この装置は、
・支持体と、
・個人の眼の少なくとも一方の眼を照明するような態様において支持体上に取り付けられている少なくとも1つの光源と、
・個人の各眼の網膜上の上記光源の網膜反射の少なくとも1つの画像を捕捉するようになっており、且つ、各捕捉画像を捕捉画像を表す信号に変換するようになっている、上記支持体上に取り付けられている少なくとも1つの画像捕捉装置であって、光源に対する個人の頭部の姿勢が2つの画像捕捉の間で異なり、上記光源は上記画像捕捉装置に関連付けられた参照枠内の既知の位置にある、少なくとも一つの画像捕捉装置と、
・個人の頭部に関連付けられた参照枠内において個人の注視方向に関連付けられた少なくとも1つの注視方向パラメータを測定するための手段と、
・個人の眼の上記屈折特性を決定するために上記少なくとも1つの捕捉画像を表す信号に応答し、且つ、決定された屈折特性に関連して個人の注視方向に関連付けられた上記少なくとも1つの注視方向パラメータを記憶装置内に記憶するようになっているコンピュータと
を備える。
【0048】
本発明の別の有利で非限定的な特徴によって、個人の頭部の上記姿勢パラメータを測定するための前記手段は、個人の頭部の上又は眼鏡の上に取り付けられるようになっている、個人の頭部の位置を識別するための要素、少なくとも1つの超音波送信器と少なくとも1つの超音波受信器とを含む測定装置、又は、電磁センサを使用する測定装置を備える。
【0049】
この測定装置は、個人の頭部の姿勢パラメータを遠隔的に迅速に且つ正確に測定することを可能にする。
【0050】
本発明の別の有利で非限定的な特徴によって、光源が、公知である互いに対する相対的な位置を有する複数の二次光源を備え、これらの二次光源の各々は互いに独立的に点灯させられうる。
【0051】
各々の画像捕捉のために異なる光源を起動することによって、個人の頭部が動かないならば、上記光源に対する個人の頭部の姿勢が各々の画像捕捉中に異なっていることを確実なものにすることが可能である。
【0052】
あるいは、代替策として、光源が画像捕捉装置に対して移動可能であってもよい。
【0053】
非限定的な具体例として示されている添付図面を参照しながら行われる以下の説明が、本発明が何であるかということと、本発明がどのように実施されるかということとを示す。
【図面の簡単な説明】
【0054】
【図1】個人が測定装置を手で保持している、本発明の方法の実施形態の斜視図である。
【図2】第1の画像捕捉中に個人が図1の測定装置の方を見ている時の、図1の個人の眼の略斜視図である。
【図3】図2に関連付けられた、捕捉された第1の画像の画像捕捉平面における概略図である。
【図4】第2の画像捕捉中に個人が図1の測定装置の方を見ている時の、図1の個人の眼の略斜視図である。
【図5】図4に関連して捕捉されたときの第2の画像の画像捕捉平面における概略図である。
【図6】図1の測定装置を手に持っている個人の側面図である。
【図7】個人の眼と図1の測定装置とを示す、水平平面における略平面図である。
【発明を実施するための形態】
【0055】
全般的に述べると、この着想は、既知であるか又は決定されている視力条件の下で、自然な姿勢である個人の両眼の屈折特性の少なくとも1つを自動的に測定することである。したがって、対応する眼の屈折特性に関連してこの注視方向パラメータを記録するために、又は、測定された注視方向パラメータが個人が予め規定された当該視力条件にあるということを示す時に、画像捕捉を起動させるために、又は、一連の画像が捕捉され終わった後に、これらの条件の下で眼の屈折特性を決定するように当該の視力条件の下で捕捉された画像を選択するために、各々の捕捉画像に対応する注視方向に関連しているパラメータの測定が行われる。
【0056】
特に重要なのは、個人が近見視又は中間視で見ている場合の視力条件である。眼の屈折特性は、眼が近見視又は中間視に追従する「調節」として知られている現象によって著しく変化させられる可能性がある。
【0057】
後述の具体例では、この測定は、例えば、The British Journal of Ophthalmologyにおいて1944年にM.Kleinによって発表された標題「検影法の原理」の論文に説明されているような、網膜検影法の原理に依拠している。
【0058】
本発明の測定装置100の一例が、図1と図2と図4とに示されている。この測定装置100は、画像捕捉装置10と、個人の頭部を照明するための照明手段20とのための支持体として使用されるハウジング30を備える。
【0059】
ハウジング30は長方形タブレットの形であることが有利である。
【0060】
一例として、次の屈折特性、すなわち、屈折異常符号(ametropia sign)、球面屈折力、円柱屈折力、及び、円柱の軸線の位置の少なくとも1つを決定することによって、個人の各々の眼の客観的な屈折異常(objective ametropia)を決定することが望ましい。
【0061】
近視の場合には屈折異常符号は負であり、遠視の場合には屈折異常符号は正である。屈折異常の値は、眼の球面屈折力と円柱屈折力とに対応する。この値は、眼の様々な経線に沿って決定される。円柱屈折力と円柱の軸線とが眼の乱視を特徴付ける。
【0062】
これらの屈折特性は、個人の屈折異常の矯正に適合させられている眼鏡レンズのタイプ(眼鏡レンズの収束、発散、環状面、及び、屈折力)が決定されることを可能にするので、個人に対して適合させられた光学機器を選択する時に不可欠である。
【0063】
個人は、図1に示されているように、立っていようと座っていようと、自然な姿勢の状態にある。測定装置100に対する個人の姿勢は、顎支持体又は額受け台によって束縛されない。用語「自然の」姿勢は、最も快適であり、最も人間工学的に適しており、個人にとって最も疲れにくい、個人の姿勢を意味するために使用される。
【0064】
段階a)では、個人の頭部の少なくとも1つの姿勢が、個人の要望に応じて、画像捕捉装置に関連付けられた参照枠内において調整される。
【0065】
このことは、特に測定装置を個人が手で保持する第1の実現形態では、例えば図1に示されているように、個人が自由に姿勢をとり、画像捕捉装置100をその個人が要望する場所に置くことによって、単純に個人によって手動で行われてもよい。
【0066】
画像捕捉装置が支持体上に置かれるか又は台の上に取り付けられる第2の実施形態では、測定装置の位置決めが変更されることを可能にする遠隔操作装置によって、又は、指示にしたがって測定装置の位置を変更するオペレータに対して声による命令を与えることによって、個人がこの調整を遠隔的に行うことが可能である。
【0067】
最後に、第3の実施形態では、測定装置は定置されており、個人は、測定装置100に対して所望の位置をとる。
【0068】
したがって、その実施形態が何であろうとも、自然であり且つ束縛されていない位置にある個人の頭部の画像を捕捉することが可能である。このことが、実際の視力条件の下で個人の眼の屈折特性を決定することを可能にする。
【0069】
一変形例では、例えば画像捕捉装置の瞳の付近に置かれたテキストを読むことのような特定の目視作業が、個人に課せられるだろう。この場合に、このことが、画像が捕捉されることを可能にし、このため、目視作業を行うために個人が自然に採用する姿勢において個人の眼の屈折特性が決定されることを可能にする。
【0070】
段階b)では、オペレータが、既知の画像捕捉装置に関連付けられた参照枠(O、X、Y、Z)内の既知の位置を有する少なくとも1つの光源によって個人の両眼を照明する。
【0071】
画像捕捉装置10に関連付けられた参照枠(O、X、Y、Z)は、例えば、画像捕捉装置の瞳の上で中心に配置されるだろう。軸線(O、X)(O、Y)は、画像捕捉平面PCI内を延び、この画像捕捉平面PCIは、この場合には支持体30の平均平面によって表される画像捕捉装置のセンサの平面である。軸線(OZ)は、画像捕捉装置の光軸であり、この軸線は画像捕捉平面PCIに対して垂直である。
【0072】
図1と図2と図4とに示されている例では、測定装置100の照明手段20は複数の光源20を備える。これらの光源は、非常に小さいサイズ、例えば、ほぼ点のサイズであることが好ましい。例えば、光源の各々が約1ミリメートル(mm)の幅を有する。この例では、光源は発光ダイオード(LED)20である。これらのLEDの各々はそれぞれ互いに独立的に点灯させられて個人の両眼を照明する。これらのLEDは発散光源を構成する。したがって、有利なことに、これらのLEDは、非常に広い立体角を照明し、その結果として個人の頭部が広範囲に照明される。
【0073】
本明細書に説明されている光源20は一次光源であるが、しかし、一変形例では、この光源20は、この一次光源から到来する光線自体を反射又は偏向させることによって得られる二次光源であることが可能である。
【0074】
この例では、LEDは、画像捕捉装置10のための支持体としても機能するハウジング30の前面上に配置されており、このため、画像捕捉装置の参照枠内におけるこれらのLEDの各々の位置が構造によって分かっており且つ一定不変である。
【0075】
この例では、LEDは、ハウジング30の前面の平面内に位置しており、且つ、画像捕捉装置10の瞳11が位置している箇所において交差する4つの位置合わせ方向に沿って位置合わせされている。
【0076】
あるいは、この代わりに、当業者に公知である任意の他のタイプの光源を使用することを想定することが可能である。所定の位置にある時に、画像捕捉装置の参照枠内において個人の頭部に対して相対的に移動させられることが可能な単一の光源を使用することが可能である。この場合に、測定装置が、この参照枠内の光源の位置を決定するための手段を有する。
【0077】
画像捕捉段階では、画像捕捉装置10は、個人の2つの眼の網膜上の上記光源の網膜反射各々の少なくとも1つの画像、好ましくは2つの画像を捕捉し、各々の画像は対応する画像捕捉平面内で捕捉され、上記光源に対する個人の頭部の相対的姿勢はこの2つの画像捕捉の間で異なっている。
【0078】
画像捕捉装置による画像捕捉はオペレータによって起動されるか又は例えば電子及びコンピュータ装置によって自動的に起動される。
【0079】
例えば、この電子及びコンピュータ装置は、画像取得及び、取得された画像の処理のための、そのコンピュータ上に実装されているソフトウェアを有するコンピュータを備える。
【0080】
測定装置100は、対応する通信手段を有するコンピュータと通信するための手段を有することが好ましい。測定装置100とコンピュータとの通信手段は有線又は無線タイプであってよく、任意の従来通りの設計であってよく、したがって、この通信手段は説明されない。これらの通信手段が、共通のネットワークアーキテクチャの中に、又は、画像捕捉装置が複数のコンピュータと通信することを可能にする固定通信リンクの中に組み込まれていることが有利である。
【0081】
したがって、この電子及びコンピュータ装置は、オペレータによって予め規定された間隔で画像捕捉を起動する。測定装置100は、捕捉された画像を電子及びコンピュータ装置に送信し、及び、この電子及びコンピュータ装置は、後述されているように、段階c)で行われる個人の頭部に関する姿勢パラメータの測定値を受け取る。
【0082】
一変形例では、電子及びコンピュータ装置が、第1に、捕捉画像及び/又はこれらの画像を処理する段階中に得られた結果を通信するための表示スクリーンと、第2に、この電子及びコンピュータ装置がこれらの結果を他の機器と通信することを可能にする結線とを含む独立したシステムであるように講じられることがある。さらに、このシステムのための独立した処理システムが測定装置100内に採用随意に組み込まれるように講じられることがある。
【0083】
例えば、2つの画像捕捉が図2と図4に示されている構成において行われる。これらの図は、測定装置100に対する、これら2つの画像の捕捉中の個人の眼を示す概略図である。
【0084】
図2に示されているように、第1の画像捕捉中に、測定装置100のLED20の第1のLED21が、点灯させられて、光線23によって表されているように個人の右眼ODと左眼OGとを同時に照明する。これらの光線23は個人の眼OD、OGの各々の中の網膜を照明し、したがって、その次に、網膜は二次光源として作用する。これらの光線は網膜によって拡散の形で反射され、及び、眼から出て元に戻る。これらの光線23の一部分は、網膜によって拡散の形で反射され、対応する眼OD、OGを出て、画像捕捉装置10の瞳11によって受け取られる。
【0085】
同様に、図4に示されている第2の画像捕捉中に、測定装置の第2のLED22が、点灯させられて、光線24によって表されているように、個人の右目ODと左眼OGを同時に照明する。これらの光線は個人の眼OD、OGの各々の中の網膜を照明する。これらの光線24の一部分は、網膜によって反射され、対応する眼OD、OGを出て、画像捕捉装置10の瞳11によって受け取られる。
【0086】
したがって、画像捕捉装置10によって捕捉される対応する画像I1、I2は、個人の眼OD、OGの各々の網膜上の対応する第1及び第2のLED21、22の反射画像IROD1、IROG1、IROD2、IROG2を含む。
【0087】
一般的に、各々の網膜反射画像IROD1、IROG1、IROD2、IROG2の一部分だけが、各々の眼OD、OGの瞳孔11を通して目視可能である。目視可能な画像の一部分は、個人の瞳孔と画像捕捉装置の瞳との間を延びる切頭円錐形の空間の中に位置する部分である。
【0088】
この例では、網膜反射の画像IROD1、IROG1、IROD2、IROG2が、対応する眼の画像IOD1、IOG1、IOD2、IOG2内に網掛け表示の形で示されている(図3及び図5)。捕捉画像において目視不可能なこの反射画像の輪郭が、点線として描かれている。
【0089】
この電子及びコンピュータ装置は、実際には、一連の画像を捕捉する働きをし、目視可能な網膜反射画像をその上に有する画像だけが引き続いて保持される。特に、この電子及びコンピュータ装置は、上記切頭円錐形空間に入って出ていく画像に相当する2つの画像を選択し、この1対の画像が最大量の情報に対するアクセスを与える。
【0090】
この例では、画像捕捉装置の参照枠内の個人の頭部の姿勢が、画像が捕捉されている最中は同一のままであるが、しかし、異なるLEDが各々の画像捕捉中に点灯させられるので、上記光源に対する相対的な個人の頭部の姿勢は2つの画像捕捉の間で異なる。この目的のために、例えば、非常に短い時間間隔で隔てられている2つの画像を捕捉することが可能であり、したがって、この時間間隔内における個人のあらゆる移動が非常にわずかである。例えば、この時間間隔は、2ミリ秒(ms)から100msの範囲内であるだろう。
【0091】
図3と図5に概略的に示されている画像I1、I2を比較することによって、画像I1内のLED21の反射の画像IROD1、IROG1の位置が、画像I2内のLED22の反射の画像IROD2、IROG2の位置とは異なっていることが示される。言い換えると、画像捕捉中に点灯させられる光源の位置が変化する時に、上記光源の反射の画像の位置も変化する。
【0092】
この例では、対応する眼の瞳孔を通して撮像された各々のLEDの反射の画像IROD1、IROG1、IROD2、IROG2の位置が、個人の瞳孔の画像IPD1、IPG1、IPD2、IPG2の照明された区域、すなわち、図3と図5における網線によって表されている点灯している光源の網膜反射と、LED21、22によって照明されていない瞳孔の暗帯との間の境界又は限界ILD1、ILG1、ILD2、ILG2によって表されている。この限界ILD1、ILG1、ILD2、ILG2は、光源の反射の画像IROD1、IROG1、IROD2、IROG2の端縁に一致する。
【0093】
個人が画像捕捉装置10の瞳11の付近を見ている時に、画像捕捉段階が行われる。その場合に、個人の各々の眼の注視方向に従う視線DVD、DVGが、画像捕捉装置10(図7)の瞳11に対して各々の眼OD、OGを接続する各々の観察線DOD、DOGに対して10度未満の閾値以下の角度AD、AGを形成することが好ましい。この条件によって、個人の眼の瞳孔が適切な形で撮像されることを確実なものにすることが可能であり、したがって、個人の2つの眼の各々の眼の上の光源の網膜反射が2つの捕捉画像中で目視可能である。
【0094】
実際には、1組の3つ以上の画像が画像捕捉装置10によって捕捉される。この後に、光源の角膜反射とこれに対応する眼の瞳孔との相対的位置とから個人の注視方向を計算することによって、個人が画像捕捉装置10の瞳11の付近(すなわち、予め規定された区域)を見ている画像が選択される。
【0095】
この例では、この決められた区域は、注視方向内の視線DVD、DVGと観察線DOD、DOGとの間の角度AD、AGがその表面内では上記閾値よりも小さい、画像捕捉装置の瞳の周りに位置している支持体の表面に相当する。
【0096】
複数の画像が選択される場合には、電子及びコンピュータ装置は、採用随意に、これらの画像を平均化するようにプログラムされてもよい。
【0097】
この代わりに、代替策として、画像が画像捕捉装置10の瞳11の付近(すなわち、決められた区域内)を見ている間に、上記少なくとも1つの画像が捕捉されることを確実なものにするために、本発明の方法が画像捕捉段階の前の検証段階を含むように講じることも可能である。個人の注視方向がこの区域内にある画像だけが捕捉される。
【0098】
最後に、さらに、2つのLEDの各々が点灯させられている時に個人の頭部の複数の画像を捕捉することが可能であり、このため、各LEDが点灯している間に捕捉された画像を平均化すること、及び/又は、異なるLEDを連続的に点灯させることに対応する一連の画像を捕捉することが可能となる。この場合には、画像処理によって得られる結果の正確さが改善される。
【0099】
上記画像捕捉の最中に行われる段階c)では、個人の頭部に関連付けられた参照枠内の個人の注視方向に関係する少なくとも1つのパラメータが測定される。
【0100】
この例では、この注視方向パラメータは、排他的に、個人が画像捕捉装置の瞳を注視している間に測定される個人の頭部の姿勢に関係するパラメータである。
【0101】
この例では、この注視方向パラメータは、画像捕捉装置の瞳に向かって下げられている注視を表している頭部の姿勢のパラメータである。眼の目視点が画像捕捉装置の瞳に近いので、頭部の姿勢に関するこのパラメータは注視方向に関連しており、この注視方向は計算によってこのパラメータから直接的に推定されるだろう。
【0102】
この測定は、2つ以上の捕捉画像の各組の中の画像の少なくとも1つに関して行われる。これについてはより詳細に後述する。
【0103】
この測定は、画像を捕捉するのと同時に、又は、画像捕捉前若しくは画像捕捉後の100ms以下の時間間隔内において行われる。
【0104】
段階e’)では、電子及びコンピュータ装置は、上記画像を表している上記信号から、2つの捕捉画像の間の光源の網膜反射画像の移動を決定する。
【0105】
電子及びコンピュータ装置は、その決定された網膜反射の画像の移動を、2つの画像捕捉の間の光源に対する個人頭部の姿勢の間の差異と比較し、個人の眼の屈折特性がそれから推定される。
【0106】
本発明の方法の第1の変形例では、段階h)において、個人の注視方向パラメータの測定の結果が、上記注視方向に対応する視力条件の下での捕捉画像から推定される屈折特性に関連して、電子及びコンピュータ装置の記憶装置内に記憶される。
【0107】
その次に、この電子及びコンピュータ装置は、個人の注視方向と眼の屈折特性とに関連するマップを再構成する。
【0108】
本発明の方法の第2の変形例では、画像捕捉段階中に、電子及びコンピュータ装置は、注視方向パラメータHの値が上記予め規定された視力条件(例えば、近見視)に対応する範囲内に含まれない場合には、画像捕捉を起動しない。その次に、この電子及びコンピュータ装置は、個人が上記予め規定された視力条件にある時の個人の眼の屈折特性だけを決定する。
【0109】
この変形例は、画像を捕捉することとは無関係に、注視方向が得られる時にだけ明瞭に想定されなければならない。このことは、例えば、注視方向パラメータが個人の頭部の姿勢から直接的に推定できる時に当てはまり、及び、個人の頭部の姿勢は、画像捕捉を必要としない測定手段によって測定される。さらに、動画カメラが個人の頭部を連続的に動画撮影することと、適切な瞬間に画像捕捉を起動するために注視方向パラメータが動画撮影画像から同時に計算されることを想定することが可能である。
【0110】
本発明の方法の第3の変形例では、電子及びコンピュータ装置は、捕捉された画像の中から、測定された注視方向パラメータが上記予め規定された視力条件(例えば、近見視)に相当する範囲内に含まれる値を表す画像を選択する。その次に、この電子及びコンピュータ装置は、選択された画像から個人の眼の屈折特性を決定する。
【0111】
実際に且つ好ましくは、両眼OD、OGが同時に照明されている時に、両眼の各々の網膜上の光源の網膜反射画像が同時に捕捉され、段階e’)において、上記光源に対する個人の頭部の各姿勢において同時に捕捉される両眼の網膜反射に関係する上記信号に少なくとも基づいて比較が行われる。
【0112】
さらに明確に述べると、段階c)では、図6に示されているように、例えば、画像捕捉装置10の瞳11と、例えば遠見視条件の下での水平解剖学的平面PFHに対応する近見視又は中間視のような画像捕捉の視力条件の下での傾斜した解剖学的平面PFIとの間の垂直距離Hの測定が行われる。
【0113】
一変形例では、段階c)において、画像捕捉装置の瞳と、個人が自然な姿勢の状態であり且つ水平線を見ているときにほぼ水平である水平解剖学的平面PFHとの間の距離が測定される。
【0114】
別の変形例では、注視方向パラメータが、直接的に、両眼の角膜反射の画像を表している信号に基づいて電子及びコンピュータ装置によって決定される視線DVD、DVGの座標であるように講じられることがある。
【0115】
次の頭部姿勢パラメータも測定される。
・頭部又は個人の眼OD、OGの一方と画像捕捉装置との間の距離DD、DGであって、例えば、より詳細に述べると、個人の眼OD、OGの回転の中心と画像捕捉装置との間の距離DD、DG。
【0116】
さらに、次の頭部姿勢パラメータの少なくとも1つを測定するように講じられることがある。
・第1の参照平面PREFD、PREFGの水平軸線X’の周りにおける、第1の参照平面PREFD1、PREFG1に対する画像捕捉平面PCIの第1の傾斜角度AVD、AVGであって、第1の参照平面PFEFD1、PREFG1は観察線DOD、DOGに対して垂直であり、観察線DOD、DOGは個人の眼OD、OGのうちの一つを画像捕捉装置10の瞳11に接続する、第1の傾斜角度AVD、AVG。
・上記水平軸線X’に対して垂直である上記第1の参照平面PREFD1、PREFG1の軸線Yの周りにおける、第1の参照平面PREFD1、PREFG1に対する画像捕捉平面PCIの第2の傾斜角度AHD、AHG。
【0117】
したがって、第1の角度AVD、AVGは、画像捕捉平面PCIと水平軸線X’に対して垂直な上記平面との間の交差部分によって画定される線と、参照平面PREFD1、PREFG1と水平軸線X’に対して垂直な上記平面との間の交差部分によって画定される線との間の、上記水平軸線X’に対して垂直な平面内に存在する角度に相当する。
【0118】
したがって、第2の角度AVD、AVGは、画像捕捉平面PCIと軸線Yに対して垂直な上記平面との間の交差部分によって画定される線と、参照平面PREFD1、PREFG1と軸線Yに対して垂直な上記平面との間の交差部分によって画定される線との間の、上記軸線Yに対して垂直な平面内に存在する角度に相当する。
【0119】
注視方向H及び個人の頭部の姿勢のこれらのパラメータを測定するために、個人の頭部に、例えば、国際公開第2008/132356号に説明されている位置識別システムのような位置識別システムが取り付けられてもよい。この位置識別システムは、着用者の頭部上に直接的に保持されてもよく、又は、眼鏡レンズを含まない眼鏡フレーム上に配置されてもよい。
【0120】
姿勢に関する様々なパラメータ、特に着用者の頭部と画像捕捉装置との間の距離に関する様々なパラメータを計算する方法が、その文献に説明されている。
【0121】
解剖学的平面PFHが、その文献において説明されているようなフランクフルト平面であることが有利である。個人の頭部が自然な姿勢の状態であり且つ個人が画像捕捉装置を見ており無限遠は見ていない時に、その傾斜した解剖学的平面PFIはフランクフルト平面に相当する。
【0122】
特に、従来の校正段階は、個人が遠方を見ている間にフランクフルト平面の位置が決定されられている最中に行われる。この場合に、フランクフルト平面はほぼ水平である。個人の頭部が傾斜している時には、さらに、上記文献に説明されている位置識別システムの垂直位置識別要素の画像の幾何学的特徴からフランクフルト平面の位置を推定することが可能である。例えば、これは、その垂直位置識別要素上に示されているパターンの暗縞(black strip)間の間隔に関係するだろう。
【0123】
上記文献は、さらに、個人の頭部の参照枠内における個人の眼の回転中心の位置を決定する方法も説明している。この決定は、さらに、校正段階として行われてもよい。
【0124】
個人が画像捕捉装置の瞳を注視する時には、眼の回転中心の位置が頭部の参照枠内においてすでに決定されているので、且つ頭部の位置が画像捕捉の参照枠内においてすでに決定されているので、画像捕捉参照枠内における眼の回転中心の位置をそれから推定することが可能である。個人が画像捕捉装置の瞳を見つめる場合には、個人の眼の注視方向と、傾斜フランクフルト平面に対する相対的な画像捕捉装置の瞳の位置とを、それから推定することが可能である。
【0125】
一変形例では、2005年にSpringerによって出版された書籍「Analysis and modeling of faces and gestures」においてM.Oka他によって発表された論文「Real−time modeling of face deformation for 3D head pose estimation」(p308−320)に説明されている方法を使用して着用者の頭部の姿勢を3次元で推定する方法が使用されてもよい。
【0126】
さらに、米国特許出願公開第2003/0169907号明細書で説明されている方法のような、注視方向パラメータを決定するための当業者に公知の「視線追跡(eye tracking)」方法を使用することを想定することも可能である。
【0127】
典型的には、視線追跡法では、個人の眼の各々の網膜上の光源の反射の座標を決定するために画像が処理される。この段階は、例えば、画像と、反射に関する理論的パターンとの間の畳み込み(convolution)によって行われる。反射の座標が、例えば、反射を表す画像の画素座標によって決定されるだろう。
【0128】
瞳孔の端縁が、例えば、勾配とハフ変換とによって輪郭を検出することによって検出され、このようにして瞳孔の中心の座標と瞳孔の直径とを決定することを可能にする。
【0129】
校正段階は、さらに、光源の反射の位置と瞳孔の中心の座標とを注視方向に関する角度に変換する多項式関係又は他の関係を決定することも可能にする。これを行うために、この校正段階中に、個人が画像捕捉参照枠内の既知の3D位置の照準点(sighting point)、又は、少なくとも上記参照枠内の既知の角度位置の照準点を注視する。
【0130】
別の校正方法が、個人の頭部に関連付けられている参照枠に対して平行である平面内の2次元の瞳孔の位置を計算することにある。特に、個人の頭部に取り付けられている参照枠に対して平行なこの平面は、上記フランクフルト平面に対して垂直な額平面(forehead plane)であってよい。
【0131】
電子及びコンピュータ装置が、さらに、測定された頭部姿勢パラメータと注視方向パラメータとを記憶装置内に記憶することが有利である。したがって、屈折特性は、こうして計算されることが可能であり、おそらくは、これらの頭部姿勢パラメータの関数として後で矯正されることが可能である。
【0132】
例えば、個人の注視方向における視線DVD、DVGが、個人の眼を画像捕捉装置の瞳に接続する観察線DOD、DOGに対して角度シータをなす時には、捕捉画像上の個人の瞳孔の画像は円形ではなく、むしろ楕円形である。この場合に、コンピュータは、瞳孔の実際の形状、したがって光源の画像の反射の実際の形状を再構成するために、上記角度シータのコサインに等しい係数で楕円の小径を割り算するようにプログラムされている。このことは、対応する画像処理の終了時に屈折特性をより正確に決定することを可能にする。
【0133】
実際には、段階e’)において、電子及びコンピュータ装置は、光源の異なる位置に対応する2つの画像における光源の網膜反射画像の移動方向を、2つの対応する画像捕捉の間の光源自体の移動方向と比較する。
【0134】
図2から図5に示されている例では、光源はLED21の位置からLED22の位置に移動し、すなわち、個人の頭部の参照枠内においてほぼ水平である軸線に沿って、着用者の頭部の参照枠内において左から右に移動する。
【0135】
個人の眼の各々の瞳孔を通過して撮像されたLED22の網膜反射の画像IROD2、IROG2は、LED21の網膜反射の画像IROD1、IROG1に対して参照枠内においてわずかに左に片寄っている。
【0136】
したがって、網膜反射の画像IROD1、IROG1は、LEDの移動軸線に対して平行である眼の軸線に沿って、光源の移動方向とは反対向きの方向に移動させられる。この例では、これらの軸線はほぼ水平である。
【0137】
網膜検影法の原理にしたがって、電子及びコンピュータ装置は、LEDの移動軸線に対して平行である眼の軸線に対して垂直な眼の経線に沿って、すなわち、この例では垂直の経線に沿って、個人の眼OD、OGが負の屈折異常(すなわち、近視)を示すということを、この比較から推定するようにプログラムされている。
【0138】
反射の画像の移動が光源の移動と同じ方向に生じる時には、電子及びコンピュータ装置は、対応する経線に沿って、個人の眼OD、OGが正の屈折異常(すなわち、遠視)を示すということを、この比較から推定するようにプログラムされている。
【0139】
この例では、測定装置の平面内のLED20の構成が、支持体30の前面の上にLEDが一直線に配列されている4つの方向の各々に配置されている少なくとも2つのLEDを連続的に点灯させることによって、第1の経線から45度に方向配置されている2つの経線とその第1の経線から90度に方向配置されている1つの経線とを含む眼の4つの経線に沿って、各々の眼の屈折異常の符号を決定することを可能にする。
【0140】
一変形例では、段階e)において、電子及びコンピュータ装置は、光源の網膜反射の画像IROD1、IROG1、IROD2、IROG2の幅を決定するために、少なくとも1つの画像を表している信号、好ましくは各々の画像を表している信号を使用して、個人の眼の屈折異常に関する値をそれから推定する。
【0141】
この例では、光源がLEDなので、画像は円形の形状である。
【0142】
したがって、乱視を示さない眼の場合には、光源の網膜反射の画像は円形の形状である。この場合には、網膜反射の画像の幅は反射の直径に一致する。
【0143】
眼が実際に乱視である場合には、網膜反射の画像が楕円形の形状を示す。この場合には、最大の直径を有する楕円の軸が、絶対値において最大の屈折異常を示す眼の経線に一致する。この場合には、網膜反射の画像の幅が上記楕円形の最大直径に一致する。
【0144】
この幅を決定するために、電子及びコンピュータ装置は、対応する光源の網膜反射の明度(intensity)の空間分布を決定するために各々の捕捉画像を解析する。この明度の空間分布が図8に概略的に示されている。図8の各々の曲線が、眼によって反射される光の比率に相当する。
【0145】
各々の曲線の水平域(plateau)上に位置している点が、瞳孔の表面積全体に及ぶ反射に相当し、一方、各々の曲線のスロープ上に位置している点が、図3と図5とに示されているような眼の瞳孔内の目視可能な端縁を有する反射に相当する。明度の空間分布が、説明文においてジオプターで表現されている屈折異常Dの異なる値に関して、この図に示されている。
【0146】
この例では、明度の空間分布は、光源の反射によって照明される瞳孔の面積のパーセンテージに等しい。
【0147】
このパーセンテージを決定するために、電子及びコンピュータ装置は、眼の瞳孔の形状と、光源の反射によって照明されている眼の瞳孔の画像の区域と、個人の眼の瞳孔の暗帯(dark zone)との間の境界又は限界の位置とを決定する。このパーセンテージは、上述したように、眼の瞳孔の形状が正確に分かっている時に、向上した精度で決定される。
【0148】
その次に、電子及びコンピュータ装置は、例えば明度の空間分布の半分の高さにおける幅(すなわち、半値全幅)に等しいものとして、各々の明度分布に対応する網膜反射の直径を決定する。
【0149】
網膜反射の形状が楕円形である場合、電子及びコンピュータ装置は、その楕円の長軸に沿った明度の空間分布を決定し、それから網膜反射の幅を推定する。
【0150】
実際には、眼の実際の品質と光源の寸法とが、捕捉画像上に観察される明度の空間分布の変化を生じさせるだろうし、特に、上記分布を拡大するだろう。電子及びコンピュータ装置が、特に校正段階によって、こうした変化の矯正を行うようにプログラムされることが有利だろう。この校正段階は、例えば、当業者に公知である仕方で、既知の収差を表す人工の眼の補助によって行われるだろう。
【0151】
電子及びコンピュータ装置が、その空間分布の一部分を各々が示す、複数の捕捉画像からの反射の明度の空間分布を再構成することが有利であり、各捕捉画像が分布の一部を示す。特に、一連の捕捉画像が、完全に視覚化されるように且つ光源の網膜反射の明度の完全な空間分布を得るように、光源の網膜反射の画像の移動が追跡されることを可能にするように講じられてもよい。
【0152】
したがって、電子及びコンピュータ装置は網膜反射の画像の幅を非常に正確に決定する。
【0153】
光源の網膜反射の画像の幅Lが次の関係を満たし、
L=E×(−2×D×DPR+DPR/DSP−1)
前式中で、
Eは、想定されている個人の眼の瞳孔の直径であり、
DPRは、画像捕捉装置の瞳と個人の眼の網膜との間の距離であり、
DSRは、光源と個人の眼の網膜との間の距離であり、
Dは、ジオプター単位での眼の屈折異常の値である。
【0154】
したがって、屈折異常の値Dは、次の式を使用して計算できる。
D=(L/E−DPR/DSP+1)/(−2DPR)
【0155】
個人の眼の瞳孔の直径は、電子及びコンピュータ装置の中に計算パラメータとしてユーザによって入力されてもよいし、又は、例えば視線追跡法の上述の画像処理を行うことによって捕捉画像から測定されてもよい。
【0156】
第1の選択肢では、ユーザは、瞳孔のサイズに関する予め規定された平均値を入力する。第2の選択肢では、画像処理用の電子システムが、一連の記録画像の中の少なくとも1つの画像における個人の少なくとも片方の眼の瞳孔を識別し、その直径を測定する。この直径から、この電子システムは、このように測定された直径に換算係数(scale factor)を乗算することによって、瞳孔の実際のサイズを推定する。この換算係数は、例えば、国際公開第2008/132356号に説明されているような位置識別システム及びその方法を使用することによって決定される。
【0157】
画像捕捉装置の瞳と個人の眼の網膜との間の距離DPRが、段階c)で測定された姿勢パラメータから決定される。これらの姿勢パラメータは、特に、個人の眼OD、OG各々の回転中心と画像捕捉装置との間の距離DD、DGを含む。
【0158】
眼の網膜と眼の回転中心との間の距離が約11mmに等しいので、画像捕捉装置の瞳と個人の眼の網膜との間の距離DPRは、個人の眼OD、OGの回転中心と画像捕捉装置との間の距離DD、DGに11mmの距離を加えた距離に等しい。
【0159】
光源と個人の眼の網膜との間の距離DSRが、画像捕捉装置の瞳と個人の眼の網膜との間の距離DPRと、画像捕捉装置の瞳に対する、画像が捕捉されていた最中に点灯させられていた光源の既知の位置とから、電子及びコンピュータ装置によって計算される。
【0160】
この説明されている例では、距離DPRと距離DSRとが非常に類似しており、第1の近似値では、これらは等しいと見なされるだろう。
【0161】
こうして、屈折異常の値、すなわち、眼の球面屈折力又は円柱屈折力が、上記の式を使用して計算される。
【0162】
本発明の方法の実施を促進するために、点灯されている光源の網膜反射のサイズ及び形状に関する情報を可能な限り多く与える、すなわち、網膜反射の端縁を可能な限り明瞭に視覚化することを可能にする、個人の眼の画像捕捉を行うことが有利である。
【0163】
例えば、第1の組の画像の捕捉が、画像捕捉装置10の瞳11の最も近くに配置されているLEDから始めてそれから漸進的に離れる形で移動する形で、画像捕捉装置10の瞳11の両側に配置されている一連の交互のLEDのうち、単一の整列方向に配置されているLEDを連続的に点灯させることによって行われる。例えば、同じ側の連続的に点灯させられる2つのLEDの間のステップサイズ(step−size)が、検討されている整列方向に一致するLEDすべてによって迅速に走査するために、各々の反復毎に2倍にされてもよい。
【0164】
その後、反射の明度が平均的にその反射の最大明度の50%と90%に等しいLEDだけを点灯させることによって、後続の画像捕捉が行われる。反射の明度がその反射の最大明度の50%に等しい時には、反射の端縁、すなわち、その反射によって照明されている眼の瞳孔の区域と照明されていない眼の瞳孔の区域との間の境界又は限界が、眼の瞳孔を2つの等面積の区域に分割する。これは、画像捕捉装置の瞳の両側において整列させられている4つのLEDを点灯させることに相当する。
【0165】
したがって、その反射の幅がより正確に決定されることが可能である。
【0166】
眼の乱視を決定するために、電子及びコンピュータ装置は、反射の形状を解析し、その反射の明度の空間分布を決定し、ひいては、眼の異なる経線に沿って、例えば任意に選択され且つ0度、45度、90度の角度で互いに対して配置されている3つの経線に沿って、屈折異常の値を決定する。
【0167】
その後、電子及びコンピュータ装置は、屈折異常に関する最小値と最大値とに相当する眼の経線に沿った他の測定を行い、すなわち、楕円の最小直径と最大直径とを決定する。楕円の直径がその楕円の長軸の周りと短軸の周りとではわずかにしか変化しないので、電子及びコンピュータ装置は、この決定から、2つの対応する直径に沿った屈折異常に関する正確な値を推定する。
【0168】
最後に、電子及びコンピュータ装置は、その楕円の長軸のどちらか一方の側で45度においてその楕円の直径を決定する。その楕円の直径の値が、長軸に対して45度の角度に位置している軸線の周りで急激に変化するので、この測定は乱視の軸線を正確に決定することに役立つ。したがって、乱視が非常に正確に決定される。
【0169】
上記では、個人は矯正眼鏡レンズを含む眼鏡フレームを着用していない。したがって、得られる屈折特性の値が、個人自体の眼に対応する値である。一変形例では、例えば既知の屈折力と偏角とを有する眼鏡レンズを含む視力矯正機器をオペレータが上記個人の顔の上に置くことを想定することが可能である。
【0170】
こうした状況では、電子及びコンピュータ装置は、捕捉画像を表す信号、及び/又は、視力矯正機器の屈折力と偏角との関数として上記信号から推定される屈折特性を矯正するようにプログラムされる。
【0171】
例えば、特定の屈折力の視力矯正球面レンズという単純な状況では、それは、上述の方法によって決定される屈折異常の値にその屈折力を加えることに等しい。この2つの値の合計が、個人の眼の屈折特性を与える。
【0172】
その次に、個人の眼の過剰矯正又は矯正不足を決定するために、本発明の方法を再度適用することも可能である。
【0173】
当然であるが、個人は、視力矯正レンズを含まない眼鏡フレームを着用していてもよい。このようなフレームは、例えば個人の頭部の1つ又は複数の姿勢パラメータを決定するために使用される位置識別システムのための支持体の役割を果たす。
【0174】
画像捕捉装置の参照枠内の個人の注視方向が、画像が捕捉されている間は同一のままであることが好ましい。このために、電子及びコンピュータ装置は、個人の眼が2つの画像捕捉の間にわずかしか動かないように、例えば100msの間隔で、非常に短い間隔で画像捕捉を起動する。
【0175】
本発明は、あらゆる態様において上述の実施形態に限定されるものではなく、当業者は、本発明の着想にしたがって上記の実施形態にどのように変更を加えるかを理解する。
【0176】
特に、測定装置は、変形例において、少なくとも1つの超音波発信器と少なくとも1つの超音波受信器とを備える超音波測定装置を含むことがあり、又は個人の頭部に関係する姿勢パラメータを測定するための電磁センサを有する測定装置を含むことがある。
【0177】
一変形例では、段階e’)において、上記少なくとも1つの捕捉画像が、光源20の網膜反射の画像IROD1、IROG1、IROD2、IROG2の輝度の分布を決定するために使用され、個人の眼OD、OGの上記屈折特性Dは、この輝度の分布の関数として決定される。
【0178】
その次に、この屈折特性は、1997年に、「Optometry and Vision Science」Vol.174、pp.472−482において発表された論文に説明されている写真屈折検査法のような従来の写真屈折検査法によって決定される。眼の屈折特性、この場合には屈折異常の符号及び/又はその屈折異常の値は、反射の画像の輝度の分布から決定される。これは、従来の校正段階を使用して実現される。
【0179】
網膜検影法によって屈折特性を計算する方法に関して説明した様々な具体例とその変形例が、同様の態様において、写真屈折検査法の屈折特性を計算する方法を使用する方法に適用する。
【0180】
例えば、上記画像捕捉段階中に、個人の両眼の網膜上の上記光源の網膜反射の少なくとも2つの画像を捕捉し、個人の2つの眼の一方の眼の上記屈折特性を一つの画像から決定し、且つ、個人の他方の眼の屈折特性を他方の画像から決定することによって、本発明の方法を実施することを想定することが可能である。
【0181】
別の変形例では、本発明の方法は、次の段階を実行することによって行われる心理物理的な試験を含む。
r)画像の空間周波数をフィルタリングするための特定のカットオフの周波数フィルタによるローパスフィルタリングに相当する不鮮明性を示す画像を個人の眼の前方に表示する段階と、
t)段階s)で行われた心理物理的試験の結果に関連して決定された屈折特性と、段階r)で使用されたローパスフィルタのカットオフ周波数の値とを記憶装置内に記憶する段階と、
u)画像フィルタの異なるカットオフ周波数に関して、屈折特性を決定するための画像捕捉段階と段階r)と段階t)と共に、少なくとも段階b)及び段階c)を繰り返す段階。
【0182】
心理物理的試験が、さらに、画像の不鮮明性の個人による認知を特徴付ける段階s)も含み、段階u)において、この試験の結果が、さらに、対応するフィルタのカットオフ周波数に関連して記憶装置内に記憶されることが好ましい。
【0183】
このために、測定装置100は、表示装置で不鮮明性を表す画像を生成する手段と、画像を表示するための装置とを含む。例えば、この表示手段は、上述の装置のハウジング内に組み込まれているスクリーンによって構成されており、且つ、上記不鮮明画像を表示するようになっている。
【0184】
例えば、この不鮮明画像は電子及びコンピュータ装置によって生成される。この不鮮明画像は、例えば英数字文字を表す画像のような鮮明な画像の空間周波数の一部分を空間的にフィルタリングすることによって得られる。電子及びコンピュータ装置は、予め規定されたカットオフ周波数を有するローパスフィルタをその鮮明な画像に対してデジタル的に適用することによって不鮮明画像を決定する。
【0185】
さらに、スクリーン表示信号のアナログ的なフィルタリングによって不鮮明画像が得られることを想定することも可能である。
【0186】
一般的に、不鮮明画像は、一変形例では、特に不鮮明画像が得られることを可能にする任意の画像処理によって、当業者に公知の任意の方法によって得られるだろう。
【0187】
鮮明な画像が複数の異なる空間周波数成分に細分化されてもよい。
【0188】
フィルタリング中は、高い空間周波数を示す成分の振幅が減衰させられる。したがって、画像上に表示された英数字文字の輪郭が拡散するように見える。
【0189】
使用されるローパスフィルタは、その閾値よりも高い画像の空間周波数が、その閾値よりも低い画像の空間周波数よりもより大きく減衰させられる閾値に相当するカットオフ周波数によって特徴付けられる。したがって、このカットオフ周波数は、識別されることが可能な不鮮明画像の2つの詳細部分の間の最小距離に相当する。
【0190】
この不鮮明画像はリアルタイムで計算されてもよく、又は、電子及びコンピュータ装置内の画像ライブラリ内に記録されていてもよい。
【0191】
電子及びコンピュータ装置は、計算された不鮮明画像を表示することをスクリーンに生じさせるためにスクリーンと通信する。
【0192】
不鮮明画像の認知を特徴付ける段階s)は、例えば、個人に対して、表示画像の不鮮明性のこの個人の認知に関する個別的な質問を問うことにある。例えば、問われる質問は、個人が画像における不鮮明性を検出するか否かを判定すること、及び、不鮮明性の結果として個人によって感じられる困難性を評価すること、及び/又は、不鮮明画像によって表されている英数字文字における可読性の損失を評価することを決定するだろう。
【0193】
問われた質問に対する個人の回答が、表示画像の不鮮明性の度合いに関する不鮮明性の個人の認知を特徴付ける。この回答は、段階r)で使用されたローパスフィルタのカットオフ周波数の値と共に、決定された屈折特性に関連して電子及びコンピュータ装置の記憶装置内に記憶される。
【0194】
これに加えて、本発明による方法では、少なくとも段階b)及び段階c)が、屈折特性を決定するための画像捕捉段階と、画像フィルタに関する異なるカットオフ周波数における段階r)から段階t)と共に、繰り返される。
【0195】
その次に、画像の不鮮明性の度合いが変化するのに応じて、不鮮明性の認知がどのように変化するか、及び、個人の眼の屈折特性がどのように変化するのかということを決定することが可能であることが有利である。
【0196】
両眼の屈折特性が少なくとも1つの画像(例えば単一のグループの画像)から決定される本発明の一実施形態が、詳細に上述されている。
【0197】
変形例では、
上記画像捕捉段階中に、少なくとも2つの画像が捕捉され、この各々の画像は、個人の両眼の網膜上の上記光源の2つの網膜反射の画像を含み、
これら2つの画像の一方に基づいて、個人の2つの眼の一方の眼の上記屈折特性が決定され、他方の画像に基づいて、個人の眼の他方の眼の屈折特性が決定される
ことを想定することが可能である。
【0198】
例えば、1つのグループの画像が捕捉されることと、一方の眼の屈折特性を決定するためにこれらの画像の幾つかが処理され、他方の眼の屈折特性を決定するためにこれらの画像の残りが処理されることを想定することが可能である。本発明の方法の残り部分は不変のままである。
【0199】
こうした状況において、各々の眼に関して処理画像の選択を精緻なものにすることが可能であり、このことは、例えば、反射の明度がその反射の最大明度の50%と90%とに平均的に等しい捕捉画像を各々の眼に関して明確に選択することを可能にする。
【0200】
これは、特に2つの眼が互いに非常に異なる度合いの屈折異常を示す場合に有用である。
【特許請求の範囲】
【請求項1】
個人の両眼(OD、OG)の屈折特性の少なくとも1つを自動的に測定する方法であって、
a)各々の捕捉された画像を該画像を表す信号に変換するようになっている画像捕捉装置(10)に関連付けられた参照枠(O、X、Y、Z)内において、前記個人の要望にしたがって、該個人の頭部の少なくとも1つの姿勢を調整する段階と、
b)前記画像捕捉装置(10)に関連付けられた前記参照枠(O、X、Y、Z)内の既知の位置の少なくとも1つの光源(20)によって両眼(OD、OG)を照明する段階と、
c)前記個人の頭部に関連付けられた参照枠内において、前記個人の注視方向に関連付けられた少なくとも1つの注視方向パラメータ(H)を測定する段階と、
d)前記段階c)において測定された前記注視方向パラメータに対応する、前記個人の両眼(OD、OG)の網膜上での前記光源(20)の網膜反射の少なくとも1つの画像(IROD1、IROG1、IROD2、IROG2)を捕捉するために前記画像捕捉装置(10)を使用する段階と、
f)前記段階d)において捕捉された前記少なくとも1つの画像から、前記個人の眼(OD、OG)の各々について前記屈折特性(D)を決定する段階と、
h)前記決定された屈折特性に関連して、前記段階d)の画像捕捉中に測定された前記個人の注視方向に関連付けられた前記注視方向パラメータ(H)を記憶する段階
とを含み、
前記段階c)において、前記頭部の以下の姿勢パラメータ(DD、DG、H、AHD、AHG、AVD、AVG)、すなわち、
・前記画像捕捉装置(10)の瞳と、前記個人が自然な姿勢の状態にあり且つ前記画像捕捉装置に眼を向けているときに傾斜している前記個人の解剖学的平面(PFI)との間の垂直距離(H)であって、前記解剖学的平面は、前記個人が自然な姿勢の状態にあり且つ水平に見ているときにほぼ水平である水平解剖学的平面(PFH)に相当する、垂直距離(H)と、
・前記画像捕捉装置(10)の瞳と、前記個人が自然な姿勢の状態にあり且つ水平に見ているときにほぼ水平である前記水平解剖学的平面(PFH)との間の距離と、
・第1の参照平面(PREFD1、PREFG1)の水平軸線(X’)に対して垂直な平面内における、該第1の参照平面(PREFD1、PREFG1)に対する画像捕捉平面(PCI)の第1の傾斜角度(AVD、AVG)であって、前記第1の参照平面(PREFD1、PREFG1)は、前記画像捕捉装置(10)の瞳に前記個人の一方の眼(OD、OG)を接続する線に対して垂直であり、前記画像捕捉平面(PCI)と前記水平軸線(X’)に対して垂直な前記平面との間の交差部分によって画定される線と、前記参照平面(PREFD1、PREFG1)と前記水平軸線(X’)に対して垂直な前記平面との間の交差部分によって画定される線との間に存在する角度に相当する第1の傾斜角度(AVD、AVG)と、
・前記水平軸線(X’)に対して垂直な前記第1の参照平面(PREFD1、PREFG1)の軸線(Y)に対して垂直な平面内における、前記第1の参照平面(PREFD1、PREFG1)に対する前記画像捕捉平面(PCI)の第2の傾斜角度(AHD、AHG)であって、前記画像捕捉平面(PCI)と前記軸線(Y)に対して垂直な前記平面との間の交差部分によって画定される線と、前記参照平面(PREFD1、PREFG1)と前記軸線(Y)に対して垂直な前記平面との間の交差部分によって画定される線との間の、前記軸線(Y)に対して垂直な前記平面内に存在する角度に相当する第2の傾斜角度(AHD、AHG)と
のうちの少なくとも1つが測定される、方法。
【請求項2】
予め規定された視力条件の下、個人の両眼(OD、OG)の屈折特性の少なくとも1つを自動的に測定する方法であって、
a)各々の捕捉された画像を該画像を表す信号に変換するようになっている画像捕捉装置(10)に関連付けられた参照枠(O、X、Y、Z)内において、前記個人の要望にしたがって、該個人の頭部の少なくとも1つの姿勢を調整する段階と、
b)前記画像捕捉装置(10)に関連付けられた前記参照枠(O、X、Y、Z)内の既知の位置の少なくとも1つの光源(20)によって両眼(OD、OG)を照明する段階と、
c)前記個人の頭部に関連付けられた参照枠内において、前記個人の注視方向に関連付けられた少なくとも1つの注視方向パラメータ(H)を測定する段階と、
i)前記段階c)において測定された前記注視方向パラメータを、前記予め規定された視力条件に対応する所定の範囲内の値と比較し、前記段階c)において測定された前記注視方向パラメータ(H)の値が前記予め規定された視力条件に相当する前記範囲内にある場合、前記個人の両眼(OD、OG)の網膜上の前記光源(20)の網膜反射の少なくとも1つの画像(IROD1、IROG1、IROD2、IROG2)の前記画像捕捉装置(10)による捕捉を起動し、前記画像が画像捕捉平面(PCI)内で捕捉される、段階と、
j)前記予め規定された視力条件において前記個人の眼(OD、OG)の各々の前記屈折特性(D)を前記少なくとも1つの捕捉画像から決定する段階
とを含み、
前記段階c)において、前記頭部の以下の姿勢パラメータ(DD、DG、H、AHD、AHG、AVD、AVG)、すなわち、
・前記画像捕捉装置(10)の瞳と、前記個人が自然な姿勢の状態にあり且つ前記画像捕捉装置に眼を向けているときに傾斜している前記個人の解剖学的平面(PFI)との間の垂直距離(H)であって、前記解剖学的平面は、前記個人が自然な姿勢の状態にあり且つ水平に見ているときにほぼ水平である水平解剖学的平面(PFH)に相当する、垂直距離(H)と、
・前記画像捕捉装置(10)の瞳と、前記個人が自然な姿勢の状態にあり且つ水平に見ている時にほぼ水平である前記水平解剖学的平面(PFH)との間の距離と、
・第1の参照平面(PREFD1、PREFG1)の水平軸線(X’)に対して垂直な平面内における、該第1の参照平面(PREFD1、PREFG1)に対する前記画像捕捉平面(PCI)の第1の傾斜角度(AVD、AVG)であって、前記第1の参照平面(PREFD1、PREFG1)は、前記画像捕捉装置(10)の瞳に前記個人の一方の眼(OD、OG)を接続する線に対して垂直であり、前記画像捕捉平面(PCI)と前記水平軸線(X’)に対して垂直な前記平面との間の交差部分によって画定される線と、前記参照平面(PREFD1、PREFG1)と前記水平軸線(X’)に対して垂直な前記平面との間の交差部分によって画定される線との間に存在する角度に相当する第1の傾斜角度(AVD、AVG)と、
・前記水平軸線(X’)に対して垂直な前記第1の参照平面(PREFD1、PREFG1)の軸線(Y)に対して垂直な平面内における、前記第1の参照平面(PREFD1、PREFG1)に対する前記画像捕捉平面(PCI)の第2の傾斜角度(AHD、AHG)であって、前記画像捕捉平面(PCI)と前記軸線(Y)に対して垂直な前記平面との間の交差部分によって画定される線と、前記参照平面(PREFD1、PREFG1)と前記軸線(Y)に対して垂直な前記平面との間の交差部分によって画定される線との間において、前記軸線(Y)に対して垂直な前記平面内に存在する角度に相当する第2の傾斜角度(AHD、AHG)と
のうちの少なくとも1つが測定される、方法。
【請求項3】
e)前記光源(20)の網膜反射の画像(IROD1、IROG1、IROD2、IROG2)の幅又は輝度分布を前記少なくとも1つの捕捉画像から決定し、前記幅又は前記輝度分布の関数として前記個人の眼(OD、OG)の各々の前記屈折特性(D)を決定する段階
をさらに含む、請求項1又は2に記載の方法。
【請求項4】
両眼(OD、OG)が同時に照明され、両眼(OD、OG)の網膜上の前記光源(20)の網膜反射の画像が同時に捕捉され、段階e)において、前記光源(20)の網膜反射の画像(IROD1、IROG1、IROD2、IROG2)の前記幅又は前記輝度分布は、少なくとも前記光源(20)に対する前記個人の頭部の前記姿勢において同時に捕捉される両眼(OD、OG)の網膜反射に関係する前記信号から決定される、請求項3に記載の方法。
【請求項5】
前記光源(20)の網膜反射の画像(IROD1、IROG1、IROD2、IROG2)の前記幅(L)又は前記輝度分布から、前記個人の眼(OD、OG)の各々の屈折異常についての値が推定される、請求項4に記載の方法。
【請求項6】
前記個人の2つの眼(OD、OG)の各々の網膜上の前記光源(20)の前記網膜反射の少なくとも2つの画像(IROD1、IROG1、IROD2、IROG2)が捕捉され、当該方法は、
e’)前記少なくとも2つの捕捉画像から、前記光源(20)の前記網膜反射の画像(IROD1、IROG1、IROD2、IROG2)の移動を決定する段階
を更に含み、
前記個人の眼(OD、OG)の各々の前記屈折特性(D)は前記移動の関数として決定される、請求項1又は2に記載の方法。
【請求項7】
前記2つの画像捕捉中に、異なる前記光源(20)に対する前記個人の頭部の姿勢について、
段階c)において、前記2つの画像捕捉中に、前記個人の頭部の少なくとも1つの姿勢パラメータ(DD、DG、AHD、AHG、AVD、AVG)が前記画像捕捉装置(10)の前記参照枠(O、X、Y、Z)内において測定され、
段階e’)において、前記決定された網膜反射の画像の前記移動が、段階c)において測定された前記頭部姿勢パラメータ(DD、DG、AHD、AHG、AVD、AVG)の関数として、前記2つの画像捕捉の間の前記光源(20)に対する前記個人の頭部の姿勢の相違と比較され、
前記個人の眼(OD、OG)の各々の屈折特性(D)は前記比較から推定される、請求項6に記載の方法。
【請求項8】
前記個人の眼(OD、OG)の各々の屈折異常の符号が前記比較から推定される、請求項7に記載の方法。
【請求項9】
両眼(OD、OG)が同時に照明され、両眼(OD、OG)の網膜上の前記光源(20)の網膜反射の画像が同時に捕捉され、段階e’)において、前記光源(20)の網膜反射の画像(IROD1、IROG1、IROD2、IROG2)の前記移動が、少なくとも前記光源(20)に対する前記個人の頭部の各々の姿勢において同時に捕捉される両眼(OD、OG)の前記網膜反射に関係する前記信号から決定される、請求項6から8のいずれか一項に記載の方法。
【請求項10】
画像捕捉の間、前記光源(20)と前記画像捕捉装置(10)とが上に取り付けられている支持体(30)が、前記個人によって手で保持される、請求項1から9のいずれか一項に記載の方法。
【請求項11】
前記個人が、前記画像捕捉装置(10)の瞳(11)の付近を見つめている間、すなわち、前記瞳の付近の定められた区域内を見ている間に、前記少なくとも1つの画像が捕捉されることを検証するための、前記画像捕捉段階の前又は後の検証段階を含む、請求項1から10のいずれか一項に記載の方法。
【請求項12】
前記注視方向パラメータは、排他的に、個人が前記画像捕捉装置の瞳を注視している間に測定される前記個人の頭部の姿勢パラメータ(H)である、請求項1から11のいずれか一項に記載の方法。
【請求項13】
少なくとも1つの画像を捕捉する前の準備段階中に、視力矯正機器が前記個人の顔の上に配置され、前記捕捉画像を表す前記信号及び/又は該信号から推定された前記屈折特性が前記視力矯正機器の屈折力と偏角との関数として矯正される、請求項3から12のいずれか一項に記載の方法。
【請求項14】
前記段階c)において、前記個人の注視方向(DVD、DVG)は、両眼(OD、OG)の角膜反射の画像を表している信号から計算される、請求項1から13のいずれか一項に記載の方法。
【請求項15】
r)少なくとも1つの画像の捕捉の前又は最中に、前記個人の眼の前に参照画像を表示し、該参照画像は、該参照画像の空間周波数をフィルタリングするための特定のカットオフの周波数フィルタによるローパスフィルタリングに相当する不鮮明性を表す段階と、
t)前記参照画像をフィルタリングするために前記段階r)において使用された前記ローパスフィルタのカットオフ周波数の値に関連して決定された前記屈折特性を記憶装置内に記憶する段階と、
u)前記参照画像フィルタの様々なカットオフ周波数に関して、少なくとも段階b)、c)、d)、f)、r)及びt)、又は、段階b)、c)、i)、j)、r)及びt)を繰り返す段階
とを含む、請求項1から14のいずれか一項に記載の方法。
【請求項16】
・前記画像捕捉段階中に、少なくとも2つの画像が連続的に捕捉され、該2つの画像の各々は、前記個人の両眼の網膜上の前記光源の2つの網膜反射の画像に相当し、
・前記2つの画像の一方から前記個人の2つの眼の一方の前記屈折特性を決定し、且つ、他方の画像から前記個人の他方の眼の屈折特性を決定する、
請求項1又は2に記載の方法。
【請求項17】
個人の両眼(OD、OG)の屈折特性の少なくとも1つを自動的に測定するための装置であって、
・支持体(30)と、
・前記個人の眼(OD、OG)の少なくとも一方の眼を照明するような態様において前記支持体(30)上に取り付けられている少なくとも1つの光源(20)と、
・前記個人の各眼の網膜上の前記光源(20)の網膜反射の少なくとも1つの画像(IROD1、IROG1、IROD2、IROG2)を捕捉するようになっており、且つ、各捕捉画像を該捕捉画像を表す信号に変換するようになっている、前記支持体(30)上に取り付けられている少なくとも1つの画像捕捉装置(10)であって、前記光源(20)は該画像捕捉装置(10)に関連付けられた参照枠内(O、X、Y、Z)の既知の位置にある、少なくとも一つの画像捕捉装置(10)と、
・前記個人の頭部に関連付けられた参照枠内において前記個人の注視方向に関連付けられた少なくとも1つの注視方向パラメータ(H)を測定するための手段であって、前記パラメータは、
・前記画像捕捉装置(10)の瞳と、前記個人が自然な姿勢の状態にあり且つ前記画像捕捉装置に眼を向けているときに傾斜している前記個人の解剖学的平面(PFI)との間の垂直距離(H)であって、前記解剖学的平面は、前記個人が自然な姿勢の状態にあり且つ水平に見ているときにほぼ水平である水平解剖学的平面(PFH)に相当する、垂直距離(H)と、
・前記画像捕捉装置(10)の瞳と、前記個人が自然な姿勢の状態にあり且つ水平に見ているときにほぼ水平である前記前記水平解剖学的平面(PFH)との間の距離と、
・第1の参照平面(PREFD1、PREFG1)の水平軸線(X’)に対して垂直な平面内における、該第1の参照平面(PREFD1、PREFG1)に対する画像捕捉平面(PCI)の第1の傾斜角度(AVD、AVG)であって、前記第1の参照平面(PREFD1、PREFG1)は、前記画像捕捉装置(10)の瞳に前記個人の一方の眼(OD、OG)を接続する線に対して垂直であり、前記画像捕捉平面(PCI)と前記水平軸線(X’)に対して垂直な前記平面との間の交差部分によって画定される線と、前記参照平面(PREFD1、PREFG1)と、前記水平軸線(X’)に対して垂直な前記平面との間の交差部分によって画定される線との間に存在する角度に相当する第1の傾斜角度(AVD、AVG)と、
・前記水平軸線(X’)に対して垂直な前記第1の参照平面(PREFD1、PREFG1)の軸線(Y)に対して垂直な平面内における、前記第1の参照平面(PREFD1、PREFG1)に対する前記画像捕捉平面(PCI)の第2の傾斜角度(AHD、AHG)であって、前記画像捕捉平面(PCI)と前記軸線(Y)に対して垂直な前記平面との間の交差部分によって画定される線と、前記参照平面(PREFD1、PREFG1)と前記軸線(Y)に対して垂直な前記平面との間の交差部分によって画定される線との間において、前記軸線(Y)に対して垂直な前記平面内に存在する角度に相当する第2の傾斜角度(AHD、AHG)と
から選択される、測定手段と、
・前記個人の眼(OD,OG)の前記屈折特性(D)を決定するために前記少なくとも1つの捕捉画像を表す前記信号に応答し、且つ、前記決定された屈折特性に関連して前記個人の注視方向に関連付けられた前記少なくとも1つの注視方向パラメータ(H)を記憶装置内に記憶するようになっているコンピュータと
を備える、装置。
【請求項1】
個人の両眼(OD、OG)の屈折特性の少なくとも1つを自動的に測定する方法であって、
a)各々の捕捉された画像を該画像を表す信号に変換するようになっている画像捕捉装置(10)に関連付けられた参照枠(O、X、Y、Z)内において、前記個人の要望にしたがって、該個人の頭部の少なくとも1つの姿勢を調整する段階と、
b)前記画像捕捉装置(10)に関連付けられた前記参照枠(O、X、Y、Z)内の既知の位置の少なくとも1つの光源(20)によって両眼(OD、OG)を照明する段階と、
c)前記個人の頭部に関連付けられた参照枠内において、前記個人の注視方向に関連付けられた少なくとも1つの注視方向パラメータ(H)を測定する段階と、
d)前記段階c)において測定された前記注視方向パラメータに対応する、前記個人の両眼(OD、OG)の網膜上での前記光源(20)の網膜反射の少なくとも1つの画像(IROD1、IROG1、IROD2、IROG2)を捕捉するために前記画像捕捉装置(10)を使用する段階と、
f)前記段階d)において捕捉された前記少なくとも1つの画像から、前記個人の眼(OD、OG)の各々について前記屈折特性(D)を決定する段階と、
h)前記決定された屈折特性に関連して、前記段階d)の画像捕捉中に測定された前記個人の注視方向に関連付けられた前記注視方向パラメータ(H)を記憶する段階
とを含み、
前記段階c)において、前記頭部の以下の姿勢パラメータ(DD、DG、H、AHD、AHG、AVD、AVG)、すなわち、
・前記画像捕捉装置(10)の瞳と、前記個人が自然な姿勢の状態にあり且つ前記画像捕捉装置に眼を向けているときに傾斜している前記個人の解剖学的平面(PFI)との間の垂直距離(H)であって、前記解剖学的平面は、前記個人が自然な姿勢の状態にあり且つ水平に見ているときにほぼ水平である水平解剖学的平面(PFH)に相当する、垂直距離(H)と、
・前記画像捕捉装置(10)の瞳と、前記個人が自然な姿勢の状態にあり且つ水平に見ているときにほぼ水平である前記水平解剖学的平面(PFH)との間の距離と、
・第1の参照平面(PREFD1、PREFG1)の水平軸線(X’)に対して垂直な平面内における、該第1の参照平面(PREFD1、PREFG1)に対する画像捕捉平面(PCI)の第1の傾斜角度(AVD、AVG)であって、前記第1の参照平面(PREFD1、PREFG1)は、前記画像捕捉装置(10)の瞳に前記個人の一方の眼(OD、OG)を接続する線に対して垂直であり、前記画像捕捉平面(PCI)と前記水平軸線(X’)に対して垂直な前記平面との間の交差部分によって画定される線と、前記参照平面(PREFD1、PREFG1)と前記水平軸線(X’)に対して垂直な前記平面との間の交差部分によって画定される線との間に存在する角度に相当する第1の傾斜角度(AVD、AVG)と、
・前記水平軸線(X’)に対して垂直な前記第1の参照平面(PREFD1、PREFG1)の軸線(Y)に対して垂直な平面内における、前記第1の参照平面(PREFD1、PREFG1)に対する前記画像捕捉平面(PCI)の第2の傾斜角度(AHD、AHG)であって、前記画像捕捉平面(PCI)と前記軸線(Y)に対して垂直な前記平面との間の交差部分によって画定される線と、前記参照平面(PREFD1、PREFG1)と前記軸線(Y)に対して垂直な前記平面との間の交差部分によって画定される線との間の、前記軸線(Y)に対して垂直な前記平面内に存在する角度に相当する第2の傾斜角度(AHD、AHG)と
のうちの少なくとも1つが測定される、方法。
【請求項2】
予め規定された視力条件の下、個人の両眼(OD、OG)の屈折特性の少なくとも1つを自動的に測定する方法であって、
a)各々の捕捉された画像を該画像を表す信号に変換するようになっている画像捕捉装置(10)に関連付けられた参照枠(O、X、Y、Z)内において、前記個人の要望にしたがって、該個人の頭部の少なくとも1つの姿勢を調整する段階と、
b)前記画像捕捉装置(10)に関連付けられた前記参照枠(O、X、Y、Z)内の既知の位置の少なくとも1つの光源(20)によって両眼(OD、OG)を照明する段階と、
c)前記個人の頭部に関連付けられた参照枠内において、前記個人の注視方向に関連付けられた少なくとも1つの注視方向パラメータ(H)を測定する段階と、
i)前記段階c)において測定された前記注視方向パラメータを、前記予め規定された視力条件に対応する所定の範囲内の値と比較し、前記段階c)において測定された前記注視方向パラメータ(H)の値が前記予め規定された視力条件に相当する前記範囲内にある場合、前記個人の両眼(OD、OG)の網膜上の前記光源(20)の網膜反射の少なくとも1つの画像(IROD1、IROG1、IROD2、IROG2)の前記画像捕捉装置(10)による捕捉を起動し、前記画像が画像捕捉平面(PCI)内で捕捉される、段階と、
j)前記予め規定された視力条件において前記個人の眼(OD、OG)の各々の前記屈折特性(D)を前記少なくとも1つの捕捉画像から決定する段階
とを含み、
前記段階c)において、前記頭部の以下の姿勢パラメータ(DD、DG、H、AHD、AHG、AVD、AVG)、すなわち、
・前記画像捕捉装置(10)の瞳と、前記個人が自然な姿勢の状態にあり且つ前記画像捕捉装置に眼を向けているときに傾斜している前記個人の解剖学的平面(PFI)との間の垂直距離(H)であって、前記解剖学的平面は、前記個人が自然な姿勢の状態にあり且つ水平に見ているときにほぼ水平である水平解剖学的平面(PFH)に相当する、垂直距離(H)と、
・前記画像捕捉装置(10)の瞳と、前記個人が自然な姿勢の状態にあり且つ水平に見ている時にほぼ水平である前記水平解剖学的平面(PFH)との間の距離と、
・第1の参照平面(PREFD1、PREFG1)の水平軸線(X’)に対して垂直な平面内における、該第1の参照平面(PREFD1、PREFG1)に対する前記画像捕捉平面(PCI)の第1の傾斜角度(AVD、AVG)であって、前記第1の参照平面(PREFD1、PREFG1)は、前記画像捕捉装置(10)の瞳に前記個人の一方の眼(OD、OG)を接続する線に対して垂直であり、前記画像捕捉平面(PCI)と前記水平軸線(X’)に対して垂直な前記平面との間の交差部分によって画定される線と、前記参照平面(PREFD1、PREFG1)と前記水平軸線(X’)に対して垂直な前記平面との間の交差部分によって画定される線との間に存在する角度に相当する第1の傾斜角度(AVD、AVG)と、
・前記水平軸線(X’)に対して垂直な前記第1の参照平面(PREFD1、PREFG1)の軸線(Y)に対して垂直な平面内における、前記第1の参照平面(PREFD1、PREFG1)に対する前記画像捕捉平面(PCI)の第2の傾斜角度(AHD、AHG)であって、前記画像捕捉平面(PCI)と前記軸線(Y)に対して垂直な前記平面との間の交差部分によって画定される線と、前記参照平面(PREFD1、PREFG1)と前記軸線(Y)に対して垂直な前記平面との間の交差部分によって画定される線との間において、前記軸線(Y)に対して垂直な前記平面内に存在する角度に相当する第2の傾斜角度(AHD、AHG)と
のうちの少なくとも1つが測定される、方法。
【請求項3】
e)前記光源(20)の網膜反射の画像(IROD1、IROG1、IROD2、IROG2)の幅又は輝度分布を前記少なくとも1つの捕捉画像から決定し、前記幅又は前記輝度分布の関数として前記個人の眼(OD、OG)の各々の前記屈折特性(D)を決定する段階
をさらに含む、請求項1又は2に記載の方法。
【請求項4】
両眼(OD、OG)が同時に照明され、両眼(OD、OG)の網膜上の前記光源(20)の網膜反射の画像が同時に捕捉され、段階e)において、前記光源(20)の網膜反射の画像(IROD1、IROG1、IROD2、IROG2)の前記幅又は前記輝度分布は、少なくとも前記光源(20)に対する前記個人の頭部の前記姿勢において同時に捕捉される両眼(OD、OG)の網膜反射に関係する前記信号から決定される、請求項3に記載の方法。
【請求項5】
前記光源(20)の網膜反射の画像(IROD1、IROG1、IROD2、IROG2)の前記幅(L)又は前記輝度分布から、前記個人の眼(OD、OG)の各々の屈折異常についての値が推定される、請求項4に記載の方法。
【請求項6】
前記個人の2つの眼(OD、OG)の各々の網膜上の前記光源(20)の前記網膜反射の少なくとも2つの画像(IROD1、IROG1、IROD2、IROG2)が捕捉され、当該方法は、
e’)前記少なくとも2つの捕捉画像から、前記光源(20)の前記網膜反射の画像(IROD1、IROG1、IROD2、IROG2)の移動を決定する段階
を更に含み、
前記個人の眼(OD、OG)の各々の前記屈折特性(D)は前記移動の関数として決定される、請求項1又は2に記載の方法。
【請求項7】
前記2つの画像捕捉中に、異なる前記光源(20)に対する前記個人の頭部の姿勢について、
段階c)において、前記2つの画像捕捉中に、前記個人の頭部の少なくとも1つの姿勢パラメータ(DD、DG、AHD、AHG、AVD、AVG)が前記画像捕捉装置(10)の前記参照枠(O、X、Y、Z)内において測定され、
段階e’)において、前記決定された網膜反射の画像の前記移動が、段階c)において測定された前記頭部姿勢パラメータ(DD、DG、AHD、AHG、AVD、AVG)の関数として、前記2つの画像捕捉の間の前記光源(20)に対する前記個人の頭部の姿勢の相違と比較され、
前記個人の眼(OD、OG)の各々の屈折特性(D)は前記比較から推定される、請求項6に記載の方法。
【請求項8】
前記個人の眼(OD、OG)の各々の屈折異常の符号が前記比較から推定される、請求項7に記載の方法。
【請求項9】
両眼(OD、OG)が同時に照明され、両眼(OD、OG)の網膜上の前記光源(20)の網膜反射の画像が同時に捕捉され、段階e’)において、前記光源(20)の網膜反射の画像(IROD1、IROG1、IROD2、IROG2)の前記移動が、少なくとも前記光源(20)に対する前記個人の頭部の各々の姿勢において同時に捕捉される両眼(OD、OG)の前記網膜反射に関係する前記信号から決定される、請求項6から8のいずれか一項に記載の方法。
【請求項10】
画像捕捉の間、前記光源(20)と前記画像捕捉装置(10)とが上に取り付けられている支持体(30)が、前記個人によって手で保持される、請求項1から9のいずれか一項に記載の方法。
【請求項11】
前記個人が、前記画像捕捉装置(10)の瞳(11)の付近を見つめている間、すなわち、前記瞳の付近の定められた区域内を見ている間に、前記少なくとも1つの画像が捕捉されることを検証するための、前記画像捕捉段階の前又は後の検証段階を含む、請求項1から10のいずれか一項に記載の方法。
【請求項12】
前記注視方向パラメータは、排他的に、個人が前記画像捕捉装置の瞳を注視している間に測定される前記個人の頭部の姿勢パラメータ(H)である、請求項1から11のいずれか一項に記載の方法。
【請求項13】
少なくとも1つの画像を捕捉する前の準備段階中に、視力矯正機器が前記個人の顔の上に配置され、前記捕捉画像を表す前記信号及び/又は該信号から推定された前記屈折特性が前記視力矯正機器の屈折力と偏角との関数として矯正される、請求項3から12のいずれか一項に記載の方法。
【請求項14】
前記段階c)において、前記個人の注視方向(DVD、DVG)は、両眼(OD、OG)の角膜反射の画像を表している信号から計算される、請求項1から13のいずれか一項に記載の方法。
【請求項15】
r)少なくとも1つの画像の捕捉の前又は最中に、前記個人の眼の前に参照画像を表示し、該参照画像は、該参照画像の空間周波数をフィルタリングするための特定のカットオフの周波数フィルタによるローパスフィルタリングに相当する不鮮明性を表す段階と、
t)前記参照画像をフィルタリングするために前記段階r)において使用された前記ローパスフィルタのカットオフ周波数の値に関連して決定された前記屈折特性を記憶装置内に記憶する段階と、
u)前記参照画像フィルタの様々なカットオフ周波数に関して、少なくとも段階b)、c)、d)、f)、r)及びt)、又は、段階b)、c)、i)、j)、r)及びt)を繰り返す段階
とを含む、請求項1から14のいずれか一項に記載の方法。
【請求項16】
・前記画像捕捉段階中に、少なくとも2つの画像が連続的に捕捉され、該2つの画像の各々は、前記個人の両眼の網膜上の前記光源の2つの網膜反射の画像に相当し、
・前記2つの画像の一方から前記個人の2つの眼の一方の前記屈折特性を決定し、且つ、他方の画像から前記個人の他方の眼の屈折特性を決定する、
請求項1又は2に記載の方法。
【請求項17】
個人の両眼(OD、OG)の屈折特性の少なくとも1つを自動的に測定するための装置であって、
・支持体(30)と、
・前記個人の眼(OD、OG)の少なくとも一方の眼を照明するような態様において前記支持体(30)上に取り付けられている少なくとも1つの光源(20)と、
・前記個人の各眼の網膜上の前記光源(20)の網膜反射の少なくとも1つの画像(IROD1、IROG1、IROD2、IROG2)を捕捉するようになっており、且つ、各捕捉画像を該捕捉画像を表す信号に変換するようになっている、前記支持体(30)上に取り付けられている少なくとも1つの画像捕捉装置(10)であって、前記光源(20)は該画像捕捉装置(10)に関連付けられた参照枠内(O、X、Y、Z)の既知の位置にある、少なくとも一つの画像捕捉装置(10)と、
・前記個人の頭部に関連付けられた参照枠内において前記個人の注視方向に関連付けられた少なくとも1つの注視方向パラメータ(H)を測定するための手段であって、前記パラメータは、
・前記画像捕捉装置(10)の瞳と、前記個人が自然な姿勢の状態にあり且つ前記画像捕捉装置に眼を向けているときに傾斜している前記個人の解剖学的平面(PFI)との間の垂直距離(H)であって、前記解剖学的平面は、前記個人が自然な姿勢の状態にあり且つ水平に見ているときにほぼ水平である水平解剖学的平面(PFH)に相当する、垂直距離(H)と、
・前記画像捕捉装置(10)の瞳と、前記個人が自然な姿勢の状態にあり且つ水平に見ているときにほぼ水平である前記前記水平解剖学的平面(PFH)との間の距離と、
・第1の参照平面(PREFD1、PREFG1)の水平軸線(X’)に対して垂直な平面内における、該第1の参照平面(PREFD1、PREFG1)に対する画像捕捉平面(PCI)の第1の傾斜角度(AVD、AVG)であって、前記第1の参照平面(PREFD1、PREFG1)は、前記画像捕捉装置(10)の瞳に前記個人の一方の眼(OD、OG)を接続する線に対して垂直であり、前記画像捕捉平面(PCI)と前記水平軸線(X’)に対して垂直な前記平面との間の交差部分によって画定される線と、前記参照平面(PREFD1、PREFG1)と、前記水平軸線(X’)に対して垂直な前記平面との間の交差部分によって画定される線との間に存在する角度に相当する第1の傾斜角度(AVD、AVG)と、
・前記水平軸線(X’)に対して垂直な前記第1の参照平面(PREFD1、PREFG1)の軸線(Y)に対して垂直な平面内における、前記第1の参照平面(PREFD1、PREFG1)に対する前記画像捕捉平面(PCI)の第2の傾斜角度(AHD、AHG)であって、前記画像捕捉平面(PCI)と前記軸線(Y)に対して垂直な前記平面との間の交差部分によって画定される線と、前記参照平面(PREFD1、PREFG1)と前記軸線(Y)に対して垂直な前記平面との間の交差部分によって画定される線との間において、前記軸線(Y)に対して垂直な前記平面内に存在する角度に相当する第2の傾斜角度(AHD、AHG)と
から選択される、測定手段と、
・前記個人の眼(OD,OG)の前記屈折特性(D)を決定するために前記少なくとも1つの捕捉画像を表す前記信号に応答し、且つ、前記決定された屈折特性に関連して前記個人の注視方向に関連付けられた前記少なくとも1つの注視方向パラメータ(H)を記憶装置内に記憶するようになっているコンピュータと
を備える、装置。
【図1】


【図2】

【図3】
【図4】
【図5】
【図6】
【図7】

【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公表番号】特表2013−510613(P2013−510613A)
【公表日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願番号】特願2012−538375(P2012−538375)
【出願日】平成22年11月9日(2010.11.9)
【国際出願番号】PCT/FR2010/000747
【国際公開番号】WO2011/058244
【国際公開日】平成23年5月19日(2011.5.19)
【出願人】(504268065)エシロル アンテルナショナル(コンパーニュ ジェネラル ドプテーク) (16)
【公表日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願日】平成22年11月9日(2010.11.9)
【国際出願番号】PCT/FR2010/000747
【国際公開番号】WO2011/058244
【国際公開日】平成23年5月19日(2011.5.19)
【出願人】(504268065)エシロル アンテルナショナル(コンパーニュ ジェネラル ドプテーク) (16)
[ Back to top ]