
エシロル アンテルナショナル(コンパーニュ ジェネラル ドプテーク)により出願された特許
1 - 10 / 16
個人の両眼の屈折特性の少なくとも1つを自動的に測定するための方法及び装置
本発明は、個人の両眼(OD、OG)の屈折特性の少なくとも1つを自動的に測定する方法に関し、この方法は、a)各々の捕捉された画像をその画像を表す信号に変換するようになっている画像捕捉装置(10)に関連付けられた参照枠(O、X、Y、Z)内において、上記個人の要望にしたがって、上記個人の頭部の少なくとも1つの姿勢を調整する段階と、b)画像捕捉装置(10)に関連付けられた上記参照枠(O、X、Y、Z)内の既知の位置の少なくとも1つの光源(20)によって両眼(OD、OG)を照明する段階と、c)個人の頭部に関連付けられた参照枠内において、その個人の注視方向に関連付けられた少なくとも1つの注視方向パラメータ(H)を測定する段階と、d)段階c)において測定された注視方向パラメータに対応する、個人の両眼(OD、OG)の網膜上での上記光源(20)の網膜反射の少なくとも1つの画像(IROD1、IROG1、IROD2、IROG2)を捕捉するために上記画像捕捉装置(10)を使用する段階と、f)段階d)において捕捉された上記少なくとも1つの画像から、個人の眼(OD、OG)各々について上記屈折特性(D)を決定する段階と、h)決定された屈折特性に関連して、上記段階d)の画像捕捉中に測定された個人の注視方向に関連付けられた注視方向パラメータ(H)を記憶する段階とを含む。  (もっと読む)
(もっと読む)
積層レンズのための三層接着剤系及びその適用法
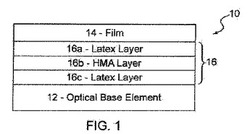
光学基礎部品上へ機能性フィルムを積層する方法、及び該方法に使用するための三層接着剤系。該三層接着剤は、該機能性フィルム上に配置された第一のラテックス接着剤層、及び該光学基礎部品上に配置された第二のラテックス接着剤層を含む。該光学基礎部品上に機能性フィルムを恒久的に保持する三層接着剤を形成するために、HMA層が、それらのラテックス層間に配置されている。本方法は、該機能性フィルム上のラテックス接着剤の第一コーティング、及び該光学基礎部品上のラテックス接着剤の第二コーティングを含む。次に、HMAは、それらの乾燥されたラテックス接着剤層の一方へコーティングされる。積層光学装置を形成するために、該フィルムは、HMAがそれらのラテックス層間に挟まれた状態で、光学基礎部品上へホットプレスされる。 (もっと読む)
厳密に1.0より大きい形状ファクターを有する無機ナノ粒子を含む透明ポリマー材料の製造方法
本発明は、透明ポリマー材料を得るために、(i)厳密に1.0より大きい形状ファクターを有する無機ナノ粒子;並びに少なくとも80重量%の量の第1の熱可塑性ポリマーのポリカーボネート(PC)及びこの第1の熱可塑性ポリマー以外の第2の透明熱可塑性ポリマーを含むポリマーマトリックス:を混合して混合物を得ることから成る工程;並びに(ii)このポリマーマトリックスを単独で又は混合物状で加熱して溶融状態にすることから成る工程:を任意の順序で含み、工程(i)の混合物が厳密に1.0より大きい形状ファクターを有する無機ナノ粒子を厳密に5重量%より少ない量で含む、透明ポリマー材料の製造方法に関する。 (もっと読む)
透明電気活性システム
本発明は、電気活性物質を収容する閉空間(12)の同じ側面上に隣接配置された2つの電極(2、3)を含む透明電気活性システムに関する。2つの電極は、250μm未満の距離を置いて分離されている。閉空間の内部に向かって延びる障壁(1)は、電極間に配置される。よって、電極間の分離は視認できない。電気活性物質間の相互中和が防止される。電気活性物質は、閉空間内に互いに分離されたセル(5)内に収容されることが有利である。よって、障壁(1)は、セル間の分離壁(4)とは異なるか、又はセル間の壁の一部と同化させることができる。  (もっと読む)
(もっと読む)
熱可塑性ポリカーボネート及び無機ナノ粒子を含む透明ポリマー材料の製造方法
本発明は、次の工程:(i)アルカリ土類金属カーボネートのナノ粒子、アルカリ土類金属サルフェートのナノ粒子、金属酸化物のナノ粒子、メタロイドの酸化物のナノ粒子及びシロキサンのナノ粒子から選択される無機ナノ粒子と、ポリカーボネート(PC)、ポリスチレン(PS)及びポリメチルメタクリレート(PMMA)から選択される溶融状態の少なくとも1種の熱可塑性ポリマーを含む組成物Aとを混合してマスターバッチを得る工程(この工程(i)の混合物は、前記無機ナノ粒子を少なくとも25重量%であって最大75重量%含む);並びに(ii)工程(i)で得られたマスターバッチと、溶融状態の熱可塑性ポリカーボネートマトリックス(PCm)を含む組成物Bとを混合して、前記無機ナノ粒子を最大10重量%、好ましくは前記無機ナノ粒子を最大5重量%含む透明ポリマー材料を得る工程:を含む、透明ポリマー材料の製造方法に関する。 (もっと読む)
熱可塑性ポリカーボネート及び表面変性された無機ナノ粒子を含む透明ポリマー材料の製造方法
本発明は、次の工程を含む透明ポリマー材料の製造方法を提供する。
(i)無機ナノ粒子と熱可塑性ポリカーボネートマトリックスとの間の界面における物理化学的相互作用を促進するのに適した少なくとも1種のモノマー及び/又は少なくとも1種のポリマーで少なくとも部分的に被覆された無機ナノ粒子を含む複合ナノ粒子を得る工程:この工程は、
・前記モノマー及び/若しくはポリマーを前記無機ナノ粒子の表面上に直接グラフトさせ若しくは直接吸着させることによって;又は
・ラジカル経路で反応することができる官能基を含むクロロシラン若しくはオルガノシランから選択されるカップリング剤を介して:
該無機ナノ粒子を前記モノマー及び/又は前記ポリマーで表面変性することによって実施される。
(ii)工程(i)で得られた複合ナノ粒子と溶融状態の熱可塑性ポリカーボネートマトリックスとを混合して前記透明ポリマー材料を得る工程。
(もっと読む)
対象者の眼の注目点の矢状面における水平方向の位置を計測する方法
本発明は、一般に、対象者に関する幾何学的且つ形態学的な計測値を取得することに関する。更に詳しくは、本発明は、対象者の眼の注目点の位置を計測する方法に関する。本方法は、例えば、対象者の異なる相対的姿勢(APIV1、APIV2、(O1、X1、Y1、Z1)、(O2、X2、Y2、Z2))における画像をキャプチャする段階と、眼の基準点((RCG1、RCD1)、(RCG2、RCD2))を識別する段階と、キャプチャされた画像によって注目点(CROD、CROG)を算出する段階と、を含む。姿勢パラメータ(APIV)の値は、対象者の頭部に配置された少なくとも1つの既知の幾何学的特徴を具備する位置識別要素(60、70、80、700、800)によって得られる。それぞれのキャプチャされた画像は、前述の位置識別要素(60、70、80、700、800)の表現を含む。従って、姿勢パラメータは、これらの画像及び既知の幾何学的特徴によって算出される。  (もっと読む)
(もっと読む)
複数の加工工具が取り付けられる回転可能な工具運搬器が設けられる、眼鏡レンズを形成する機械
眼鏡用レンズを形成する機械であり、取り付けられた複数の加工工具を有する回転可能な工具運搬器が設けられる機械であって、レンズ(100)を支持するとともに、第1の駆動手段(14)により第1の回転軸(A3)を中心にしてレンズを回転駆動する手段(12,13)と、第2の回転軸(A20)を中心にして回転するように取り付けられ、第2の駆動手段により回転駆動される工具運搬器(20)と、各工具用軸(A21,A22,A23)を中心にして回転するように工具運搬器(20)に取り付けられた複数の加工工具(21,22,23)であって、それら加工工具の少なくとも2つ(21,22)は、レンズの周面を形成するとともに異なる工具用軸(A21,A22)を有する複数の加工工具と、第1の回転軸(A3)と第2の回転軸(A20)との間の相対間隔を拡げる運動を行う第3の駆動手段と、第1の回転軸(A3)に対し実質的に交差するように延びる第3の回転軸(A0)を中心にして、第1の回転軸(A3)に対し工具運搬器(20)を旋回可能とする旋回手段(30,31,32)とを備える。  (もっと読む)
(もっと読む)
眼鏡用補正レンズの向きを決定する装置若しくは方法及び補正レンズを製造する光学的方法
本発明は、装着状態において、将来眼鏡をかける人の頭に対する眼鏡補正レンズの向きの少なくとも1つの成分を決定する装置と方法に関する。少なくとも1つの既知の幾何学的特性を有する少なくとも1つの同定要素(60、70、80)を具備する、位置同定システム(20)をフレーム(10)上に又はフレームに嵌め込んだレンズ上に取付け、垂直顔面平面内で同定要素の2次元像を撮影し、この撮影画像を処理して、同定要素の既知の幾何学的特性に依存するこの像の同定要素の幾何学的特性を計測し、そして、既知の幾何学的特性と撮影された幾何学的特性とを比較して、レンズの向きの少なくとも1つの成分を計算するものである。本発明は、補正レンズを光学的に設計製造する方法にも関する。  (もっと読む)
(もっと読む)
眼科用メガネと、嵌め込み用周縁リブをレンズの縁部に形成する方法
眼科用メガネは、内側受け溝(203)を有する少なくとも1つの円形部(201)を備えるフレーム(200)と、その円形部(201)の中に取り付けられたレンズ(100)とを備えていて、そのレンズ(100)が、前面(101)と、後面(102)と、縁部にある嵌め込み用周縁リブ(120;130)とを備え、その周縁リブは、レンズ(100)の後面(102)の側に位置する後方側部(122;132)と、レンズの前面(101)の側に位置する前方側部(121)とを持ち、その前方側部(121)と後方側部(122;132)が内側受け溝(203)に嵌め込まれる。嵌め込み用周縁リブ(130)の前方側部(121)は、前面の残部に対して少なくとも一次の連続性を有する。レンズの縁部は、後方突起部または後方肩部(124)を有する。嵌め込み用周縁リブ(130)の頂部と突起部(124)の間の距離であるその周縁リブの径方向の高さは、レンズの周縁部に沿って変化している。  (もっと読む)
(もっと読む)
1 - 10 / 16
[ Back to top ]