
圧力接触領域の空間的最小化を特徴とするデジタイザー・パッドを用いた多目的キーボードとその製造方法
【発明の詳細な説明】
[発明の背景]
本発明は電気的感圧器を用いた多目的キーボード、特に圧力接触領域でのリーデイング・エッジとトレーリング・エッジを検出できる圧力接触領域が空間的に最小であることを特徴とするデジタイザー・パッドを組み込んだキーボードに関する。
デジタイザー・パッドとその機能はよく知られている。
発明者イベントフ他(USP4,739,299,1988年4月19日)とマーガリン(USP4,455,450、1984年6月19日)の米国特許は、デジタイザー・パッドが連続しているかまたはインタリーブした伝導線を持つ対面する伝導パッドを有していることを述べている。そのインタリーブした伝導線はデジタイザー・パッドに対する加圧点のXY座標かXYZ座標を特定することができる。そのようなデジタイザー・パッドは、パッドに対して力を印加するとがった道具を使う。ここで、そのとがった道具はかなり局所化した圧力点を生成する。
しかし、局所化した接触点がさらに広い領域にまで広がり、そして、そこではその近傍の回路線も接触関係になるように押されている場合、圧力が多くの点にかかり曖昧な結果となる。このような例では、力のかかる位置の測定はおおよそ力の重心を用いる。すなわち、〈x〉=∫xF(x)ds/∫F(x)dxここで、〈x〉は力の位置の推定値。
F〈x〉は位置に関する力の分布。
積分は位置検知器の全長にそって行う。
しばしば、重心よりも、圧力を与える物体のリーデイング・エッジとトレーシングエッジの位置を測定することが望まれる。特に、重心志向のデジタイザ・パッドは電気的キーボードで使用するには不利な点を有している。リーデイングとトレーリング圧力エッジの測定は物体のサイズを決定するのに有益であり、さらに動作中の物体の位置の動的測定手段を与える。例えば、人の指がキーボードのキーを押すことを考えてもらいたい。重心を使ったデバイスは同時に押された2つのキーを見分けたり、それら2つのキーの間にある1つのキーを見分けることはできなかった。
コンピュータ、ワードプロセッサ、電話、工業用制御に電気的キーボードを組み込む共通の方法のうちますます増えているものは能動的検知要素としての薄膜スイッチを利用することである。
この薄膜スイッチは単純に印刷されたテンプレート・オーバレイで覆われているか、または従来のキーボードをまねた薄膜上に機械的キー・アクチュエータをもつ。その薄膜スイッチは通常共通の基板上にスイッチ・アレイをもち、そのスイッチ・アレイは必要とされるキーボード・パターンで配置される。普通、キー・ストロークはマイクロプロセッサによって確かめられ、その後、そのマイクロプロセッサは検出されたキー・ストロークをコンピュータの入力バスに合った形に変換する。
デジタイザー・パッドのような電気的感圧デバイスをキーボードに組み込むことは有利な点を持つ。そこでは、このパッドの基本要素はパッド上の偏差が1ポイント以上のものを同時に検出する能力を持つ。なぜなら、能動要素の位置は製造時には決められておらず、ハードウエアかソフトウエアの手段によって再定義することができるからである。
重心位置よりもむしろ、パッドを押す物体のリーデイング・エッジとトレーリング・エッジを測定するデジタイザ・パッドを利用ことはさらに望まれる。
キーボードをサポートしているデジタイザー・パッドは米国特許4739299(発明者:F.N.イベントフ他、1988年、4月19日特許)で記述されている。一般的に、イベントフ他のデジタイザ・パッドは連続しているかインタリーブした伝導線のある対面した伝導パッドを持ち、デジタイザー・パッドに対する点加圧のXY座標かXYZ座標を特定することができる。
米国特許4739299の型の標準XYZデジタイザー・パッドを組み込むことは2つの問題を発生する。第1に、この座標XYZデジタイザー・パッドを使って、キー・ロールオーバの発生を検出できない。同様に、多重のキー・コマンドは検出できない。イベントフ他のXYZデジタイザは圧力の印加された分布の中心に一致する一点を検出して出力する。
キー・ロールオーバを経験することはタイピストにとっては普通で、特に高速でタイピングしている時、最後のキーが完全に解放される前に新たなキーが打たれる時はいつでもキー・ロールオーバを経験する。例えば、標準のタイプライタ・キーボードの配列で、文字“q"と文字“t"のロールオーバはキー“e"を打った時と区別できないであろう。キー・ロールオーバの第1の問題はデジタイザ・パッドのリーデイングとトレーリング・エッジの検知特性の利用によって回避できる。ここで、そのデジタイザ・パッドは接触点からトレーリング・エッジまでの垂直方向と水平方向の距離を計ることができる。
第2の問題は標準のXYZデジタイザ・パッドに関連するもので、2つのキー・コマンド(例えば、大文字の“A"のためのシフト−A)に適用させることができないことである。例えば、標準のキーボード配列で、同時に“シフト”と“X"を押すと、“Z"キーの押下と区別することはできない。
最後に、様々なテンプレート・オーバレイを受け入れることができる多目的キーボードを作ることは最も望まれることであり、それによって、デジタイザ・パッドの接触領域を変えないで違う機能のキーボードを作ることができる。
[発明の要約]
本発明の多目的キーボードはデジタイザ・パッドを用いており、パッドが局所的圧力接触ポイントをもたない物体によって押される場合のキー・ロールオーバと多重キー・コマンドの問題を解決している。
本発明は多様な機能に適応できる多目的キーボードを提供する。このキーボードは以下のもの、すなわち、 XとY次元の両方向にそった圧力接触領域の第1エッジと第2エッジで位置づけられる圧力接触領域の最小化を特徴とするXYZデジタイザ・パッドと、 デジタイザ・パッド上にある、少なくとも1つの交換可能な機械的オーバレイと、 少なくとも1つのアドレス・データバスでデジタイザ・パッドと接続され、アドレス・データバスと各機械的オーバレイのための具体的な信号変換手段から受信したデータから、機械的オーバレイをとうしてデジタイザ・パッドに印加される圧力接触が連続して起こるよう要求するプロセッサと、を有する。
多目的キーボードを提供する方法がまた述べられている。
本発明の多くの有利点のうちの1つは、デジタイザ・パッドの能動領域のなかで、多くの能動的検知要素パターンのキーと他の機能を配列できる能力にある。パッドの境界上の位置の間に必要な境界はない。ここで、標準のXYZデジタイザ・パッド上でみられるスイッチ要素の機械的レイアウトに反するように、パッドの境界をハードウエアかソフトウエアで再定義することはできない。
様々なモデルのキーボードとキー配列を統合することの有利点は、製造者が組み立てるキーボードの各モデルにたいし、別々の薄膜スイッチをアセンブルする代わりに、ただ一つのデジタイザ・パッドをストックすればよいということである。例えば、左手用と右手用キーボードは、機械的オーバーレイを変え、定義されたキー領域を変えることで製造され、より良いコスト効率の方法で2つの異なるインプリメンテーションができる。
本発明のさらに有効な点は、一切の追加の製造コストなしで、能動領域の適切な再定義と適切なオーバレイ設計より、グラフィックス・パッドや継続制御キーのような非伝統的キーボード機能が多目的キーボードへ組み込みこめることである。
最後に、多目的キーボード上の検知領域を活性化させるのに必要な力は、薄膜機構や機械的キーでは前もって定義されていない。空間的に最小化を特徴とするデジタイザ・パッドで用いられているような感圧抵抗での、連続的な抵抗変化対力の特性は、ハードウエアかソフトウエアのいずれかを使うことで、様々なキー・ストロークの閾値を持たせるようにして利用することができる。
[図面の簡単な説明]
本発明と上記の有利点は、添付図面を含む好適な実施例についての以下の記述から理解できる。添付図面において、 図1Aは、B−Bの横断面を持つ多目的キーボードを示す図である。
図1Bは、デジタル空間的最小化パッドと交換可能なテンプレート・オーバレイを有する多目的キーボードの断面図である。
図2は、交換可能なテンプレート・オーバレイとデジタイザ・パッドの展開図である。
図3Aは、交換可能なテンプレート・オーバレイ上の1つのキーを押すことによって生成される出力の図である。
図3Bは、個々のキーのリーデイング・エッジとトレーリング・エッジがキーを識別するには接近しすぎている場合、交換可能なテンプレート・オーバレイ上の2つのキーを同時に押すことによって生成される出力の図である。
図4は、プロセッサに置かれるソフトウエア・プログラムのマッピング論理のフローチャートである。
[好適な実施例の詳細な説明]
本発明の多目的キーボードはデジタイザ・パッドのような電気的圧力・位置検知器を組み込んだものである。ここで、そのデジタイザ・パッドは、単純なテンプレート・オーバレイのキーボードか、その上に置かれる機械的アクチュエータに印加される点圧力のリーデイングとトレーリングに関する情報を積層感圧抵抗を用いて入力する。
圧力接触領域の空間的最小化を特徴とするデジイタイザ・パッドはリーデイングとトレーリング・エッジの両方を検出する。ここで、そのリーデイングとトレーリング・エッジは方向づけられたインターリーブ回路線によって定義された空間次元で、パッド上での圧力印加領域を囲む。このインターリーブ回路線は、その空間次元で圧力印加領域の境界を特定する。このデジタイザ・パッドは1つかそれ以上のデジタイザ層構造を使う。ここで、その各構造は、他の層のインターリーブ回路線に関して前定義されるか、正規に方向づけられた各層のインターリーブ回路線を持つ。
本発明のデジタイザ・パッドの一実施例は、面の中で互いに直交するように方向ずけられる2つのデジタイザ層構造を組み込んでいる。このパッドの配置はYX両方向に圧力が印加される領域の複数の境界を位置づける。その印加される圧力量は2つのデジタイザ層手段のX−Y面に位置づける。その印加される圧力量は2つのデジタイザ層手段のX−Y面に直交するZ軸方向を定義する。ここで、その2つのデジタイザ層手段は米国特許4739299(発明者:イベントフ、1988年4月19日特許)と米国特許4315238(発明者:イベントフ、1982年2月9日特許)で述べられている感圧抵抗層を利用している。
感圧領域のリーデイングとトレーリング・エッジを完全に検出できるデジタイザ・パッドの一例に、ヤニガー他の特許出願(米国特許出願番号07/308706、タイトル名“圧力接触読込の空間的明確化を特徴とするデジタイザ・パッド"1989年2月9日出願」がある。
マイクロプロセッサを前記ヤニガー他によるデジタイザ・パッドに接続し、デジタイザ・パッドの様々な領域が押される時、マイクロプロセッサのソフトウエアが検出するようにプログラミングすることによって、ある特定のキーを検知された領域と関係づけることで見分けることができる。同じ機械的構造を有する空間的最小化デジタイザ・パッドは、内部接続されたプロセッサによって定義される任意数のキーボードの配置に対応できる。
プロセッサのためのマッピング・ソフトウエアは記憶手段を使って組み込まれるか、従来のプロセッサ・ソフトウエア・プログラムを使って簡単にプログラムできる。このデジタイザ・パッドを使っている本発明の多目的キーボードは次のもの、すなわち、 選択的に積層され方向づけられた1つかそれ以上のデジタイザ層構造と、 所定の配列を有する交換可能なテンプレート・オーバレイと、 空間的最小化デジタイザ・パッドからプロセッサにX座標についての情報を転送するXアドレス情報バスと、 空間的最小化デジタイザ・パッドからプロセッサにY座標についての情報を転送するYアドレス情報バスと、を持つ。このプロセッサは制御手段の指示の下で受信した位置情報を格納または操作することにより、その情報とそのプロセッサ上で前定義された制御機能を実行する。
多目的キーボードの他の実施例は、簡単なソフトウエアの修正により、特定のキーを活性化させる力を変えるもので、プロセッサの応答を引き起こすキーの押下の閾値を変えるものである。
マイクロプロセッサのマッピング・ソフトウエアは記憶手段を使って組み込まれるか、または従来のソフトウエア・プログラムを利用して簡単にプログラムできる。
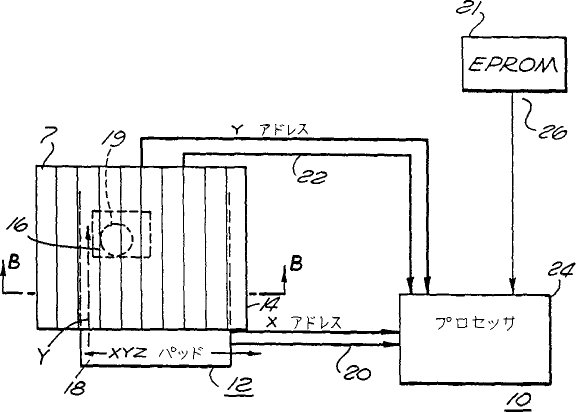
図1AはB−Bの横断面を持つ本発明の多目的キーボード10の図である。キーボード10は空間的最小化デジタイザ・パッド12をもち、交換可能なテンプレート・オーバレイ14と協調的に関係し、また、その交換可能なテンプレート・オーバレイ14の下にある。任意の個々のキー7に印加されたテンプレート・オーバレイ14上の押されたキー・ストローク16は、デジタイザ・パッド12によって検出される。定義されたキー領域19は、オーバレイ14上のキーストローク領域16の下の小型デジタイザ・パッド12の表面にあり、デジタイザ・パッド12上で方向づけされた座標系18との関連で、その位置アドレスを検出する。例えば、Xアドレス情報バス20は検出された領域のXアドレスを含み、マイクロプロセッサ24にそのXの位置を転送する。このマイクロプロセッサ24は同様に、Y方向で圧力が検出されたアドレス位置のYアドレス情報バス22からYアドレス情報を受信する。従来のソフトウエア・プログラム21は信号の解釈・制御手段26に格納されており、プロセッサ24のためのマッピングソフトウエアである。そして、そのプロセッサ24はデジタイザ・パッド12からXとYアドレス情報バス20と22をそれぞれ経由して受信したXとYアドレスを操作する。
制御手段26は、各々異なるテンプレート・オーバレイやデジタイザ・パッド12と結合して使われる機械的アクチュエータ配列14をもつ多目的キーボード10とは別に変えられうる。このように、制御手段26を取り替えることにより、テンプレート・オーバレイ上の各圧力接点の解釈を指示することができる。
例えば、図1Aで示すように、特定領域16を文字“E"として定義する第1のオーバレイ14の場合には、信号解釈手段26すなわちPROMはバス20と22から受信したXとYアドレス情報をその文字として解釈する。第1のテンプレート・オーバレイ14を第2のテンプレート・オーバレイ14に変えることは、結果として、押された同じ領域16が別の文字となるか、別のコマンド指定となる。ソフトウエア21によってEPROMの中のこの信号解釈手段26を変えることで、違ったオーバレイ14で同じく押された領域16を正しく解釈することができる。オーバレイ14が押される第2の例では、こんどはその文字が“A"として検知される。
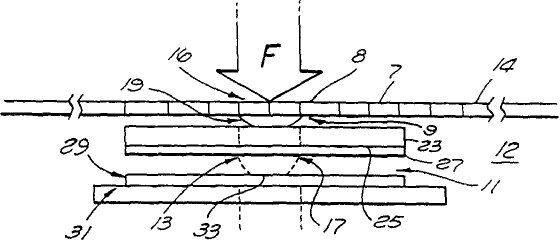
図1Bは交換可能なテンプレート・オーバレイを持つ空間的最小化デジタル・パッドを含む多目的キーボードをB−1の線に沿って切ったときの断面図である。分路層11は検知パッド領域29の伝導線に対して、通常は非伝導の関係となるように薄く覆った状態で置かれる。分路層11はマイラや他の柔軟なプラスチックのような絶縁裏板23を使って作ることが可能である。絶縁裏板23は検知パッド領域29に隣接するインターリーブした第1と第2の伝導線に対面するよう配置された表面25を持ち、圧力Fは交換可能なテンプレート・オーバレイ14の選ばれた領域に与えられ、結果的に分路層11の選ばれた領域に与えられる。交換可能なテンプレート・オーバレイ14は多様な個別のキー7と上面8と底面9とをもつ。キー7が力Fで押された時、テンプレート・オーバレイ14は絶縁裏板23の上表面に第1の圧力領域19と第2の接触領域33を形成させる。第2の接触領域33は第1の圧力エッジ13と第2の圧力エッジ17を持つ。ここで、第2の圧力エッジ17は、図2でより明快に示す伝導線のインターリーブした方向づけによって定義されたX次元に沿って、第1の圧力エッジ13と対面している。
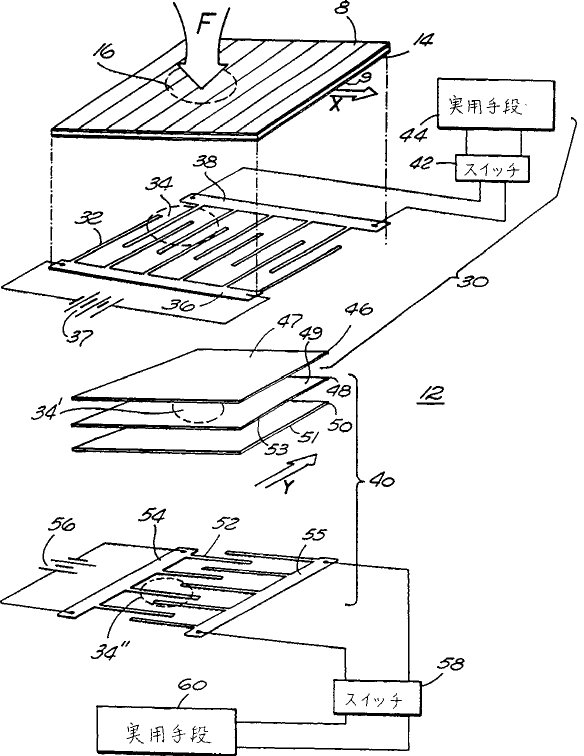
図2は交換可能なテンプレート・オーバレイ14と空間的最小化を特徴とするデジタイザ・パッド12を持つ電気的感圧デバイスの展開図である。この例のデジタイザ・パッド12はXアドレス検出構造30とYアドレス検出構造40を組み込んでいる。Xアドレス検出構造30とYアドレスYアドレス検出構造40は、それぞれインターリーブした複数の抵抗ストリップを組み込んであり、その複数の抵抗ストリップはそのストリップの長さに対して抵抗勾配があるという関係をもち、一定間隔離して配置してある。テンプレート・オーバレイ14のキー7にキー・ストローク16のような力Fによって見いだされる圧力は、抵抗性ストリップと多様な層50、48、46を通しXとYアドレス検出構造30、40によって検出される。
感圧合成層はXとYアドレス検出構造の抵抗勾配ストリップを組み込んでおり、アドレス検出構造30の中の第1の抵抗ストリップ36と第2の抵抗ストリップ38から交互に張り出したインターリーブ伝導線32によって定義されたキーボード10の面に対して正常の方向で全体の力を測定する。電圧源37は第1の抵抗ストリップ36の終端とスイッチ42と実用回路44に接続されている。第1の分路層46は絶縁層48の片側49上に置かれた分路合成層47を有し、対面して置かれ、またインターリーブ伝導線32が第1と第2の抵抗ストリップ36と38間に張り出している領域で定義されている検知パッド領域34と対面する関係となっている。
図2で、第2のデジタイザ層40はYアドレス検出構造として機能し、多様なインターリーブ伝導線52を持っている。ここで、インターリーブ伝導線52は第1の抵抗ストリップ54と第2の抵抗ストリップ55から張り出している。検知パッド領域34′は第1の検知パッド領域34とともに整列し張り出しており、また絶縁層48上に示されている。第2の電圧源56からの電圧は第2の抵抗ストリップ55の終端で接続しているスイッチ58と実用回路60と共に、第1の抵抗ストリップ54の終端に供給される。第2の分路層53は第2の分路合成層57を有し、絶縁層48の別の面53と並べられる。ここで絶縁層48は、インターリーブ伝導線52が第1と第2の抵抗ストリップ54、55間に張り出している領域によって定義されている検知パッド領域52と対面する関係になるよう置かれている。
図2の実施例では、インターリーブ伝導線52は、インターリーブ伝導線32が基本的に同じ面のなかの各本質部分から張り出している方向と直交する方向に張り出している。処理のプロセスでは、実行回路44、60とスイッチ58、42は適切な周知の方法で相互作用し調和して働き、検知パッド領域34、34′、34″上のテンプレート・オーバレイ14の下の空間的位置を決めることができる。ヤニガー他の特許07/308706(1989年2月9日出願)との関連で、本出願に組み込まれている圧力接触領域の空間的最小化を特徴とするデジタイザ・パッド12は、第1の次元(X)に従ってエッジ位置を検出する手段を提供するものである。ここでその第1の次元(X)は、第1と第2の伝導線32、52が2つのデジタイザ層30、40をスタックした基本層上で方向づけられる方向に直交する。またここで、そのデジタイザ層30、40は回路線を互いに十分に直交させることができる。デジタイザ・パッド12は2つの直交次元、特にXとY次元に従って接触領域のエッジを検出できる。
図1Bに示されるような分路層のために、例えば米国特許43152338と4739299の手段のような感圧抵抗層を組み込む。そのデジタイザ・パッドは、テンプレート・オーバレイ14を通しデジタイザ・パッド上のZ方向で、下方に押す力の大きさを検出できる。また、下方の力Fの方向に直交する第2の次元で圧力接触領域の対面するエッジが識別される。最後に、ZとX次元の両方に直交する第3の次元(例えば、Y次元)で、接触領域の2つのエッジの位置が明らかになる。
一つのデジタイザ・パッド12のために、初期のキー7の多様なパターンと他の機能をパッド12の上にあるテンプレート・オーバレイ14の能動領域内に定義することが可能である。テンプレート・オーバレイ14の機械的レイアウトはキーボードの設計と製造にとって、もはや拘束要因とはならない。一例として、直線的に配列した64x64個のキーのある機械的オーバレイをもつキーボードは、三角形状に配列した8個の円形キーがあるキーボードに再構成できる。それは、ソフトウエアとマイクロプロセッサ・コードのような関連ファームウエアを変えることによってなされる。
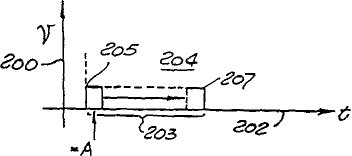
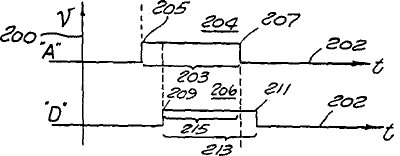
図3Aは、一つのキーが押されることによって生成される出力信号204の時間202対電圧200の関係を示すグラフィック図である。ここで、その一つのキーが押されることは、キーが一定期間203押された時の輪郭のはっきりしたリーデイング・エッジ205とトレーリング207をもつデジタイザ・パッドとプロセッサによって監視される。電圧信号204はキー“A"として、信号解釈器26によって解釈される。
図3Bは、出力信号204、206の時間201対電圧200のグラフィック図である。その出力信号204、206はテンプレート・オーバレイ上の2つのキーを同時に押すことによって生成される。ここで、個々のキーのリーデイング・エッジとトレーリング・エッジは区別するには接近しすぎている。
図3Bでは、例えば“A"キーが括弧206でくくられた区間で示す一定期間押されている時、そのキーのリーデイング205とトレーリング207をもつ信号204を生成する。“D"キーが括弧213でくくられた区間で示す一定期間押されている時、そのキーはリーデイング209とトレーリング211をもつ信号206を生成する。そして、“A"と“D"キーが同時に押された時、それらの信号204、206は各々括弧215でくくられた区間でオーバラップする。その“A"と“D"キーが押された時、その各々は異った電圧レベルを生成する。その電圧信号の大きさはデジタイザ・パッドのキーの位置に依存する。
2つのキーが同時にたたかれた時、ロールオーバが発生する。例えば、前に押されているキーが放される前に、ある別のキーが押された時のような場合に発生すうる。図3では、キー・ロールオーバの例を示している。ここでは、“A"キーが先に押されて、それから同時に“D"キーが押されているように見える。ソフトウエアは、出力信号204、206のリーデイング・エッジとトレーリング・エッジで定義されるキーボードや機械的オーバレイのある領域が押されたことを認識するようプログラムされる。“A"キーをたたくと、結果としてリーデイング・エッジが第2のキーのトレーリング・エッジに相対的に接近する。
図1Aに示されているプロセッサ24は、2つのキーのトレーリング・エッジとリーデイング・エッジ間の間隔が前定義された閾値より小さいならば、単独のキー・ストロークとして検知するようにプログラムされている。そして、2つのキーのトレーリング・エッジとリーデイング・エッジ間の間隔が前定義された閾値より大きいならば、プロセッサは自動的に2つのキーが同時に押されたとみなし、同時に押されている期間の括弧でくくられた区間215を無視する。この例では、“A"キーが解放された時、“D"キー信号206のリーデイング・エッジ209はすぐにトレーリング・エッジ211の方に移動し、間隔を狭め、押されたキーが“D"キーであると解釈されることになる。曖昧な信号を生成することなし、ロールオーバ効果を捉えることができる。
特殊制御キーが押され、他方では“control"、“shift"、“alt"キーと文字キーのような他標準キーボードのキーが押されている時、プロセッサはそれらを区別する適切な制御信号を生成するようプログラムされる必要がある。
図4は、図1Aのプロセッサ24に格納されたソフトウエア・プログラムの推薦するマッピング論理のフローチャートである。この論理図210は交換可能なテンプレート・オーバレイ上で押されたキーのリーデイング・エッジとトレーリング・エッジを決めるものである。
図4は、図1Aに示されているデジタイザ・パッド12から入力したデータを処理する論理アルゴリズム210の一例である。図3Bに示す電圧信号は、デジタイザ・パッド上のキーパッド・オーバレイの個別キー印加された圧力に応答して生成される。
次に示す2つの例では、2つのキーを同時に押すことができる。第1にタイピストは第2の押された文字キーを大文字として打つためにシフト・キーを押す。第2にタイピストはとても速く同時に2つのキーを押すため、キーロールオーバが発生する。2つのキーを同時に押すことによって生成される電圧信号は論理アルゴリズム210によってプロセッサで解析されるデータを作る。論理アルゴリズム210は、このデータから、タイピストがある文字キーを大文字にしているかどうか、すなわちキーロールオーバが発生しているかどうかを決定しなければならない。
図4の入力ステップ212では、論理アルゴリズム210への入力データとして、押されたキーの左側エッジの位置のLと、押されたキーの右側エッジの位置のRと、押されたキーの上側エッジの位置のUと、押されたキーの下側エッジの位置のDと、押されるキーへ印加される圧力であるPを含む。論理アルゴリズム210の中でプログラムされている定数は、キーボードのシフト・キーのX位置のXSHFと、キーボードのシフト・キーのY位置のYSHFと、キーをたたいたことを検知するため前設定された圧力閾値であるPTHRと、複数のキーをたたいたことを検知するため前設定された間隔閾値であるDTHRである。アルゴリズム210のための変数は、大文字の論理変数であるUCである。
第1の比較ステップ214では、あるキーが押されているかどうか決定する。検知される印加圧力Pは、キー・ストロークPTHRの検知のため、圧力閾値と比較される。もし、検知される印加圧力Pが圧力閾値より大きければ、PHTRの第2と第3の比較ステップが実行される。もし、検知される印加圧力Pが圧力閾値PHTRより小さければ、キー・ストロークは検知されず、入力データは第1の出力ステップ216で無視される。
第2と第3の比較ステップ218、222はそれぞれ、シフト・キーが押されているかどうか決定する。もし、シフト・キーが使われていれば、そのデータは大文字のキー・ストローク、すなわち大文字として解釈される。特に、第2の比較ステップ218では、キー・ストロークの左側エッジと上側エッジの位置は、シフト・キーの定まったXとY位置であるXSHF,YSHFと比較される。もし、第2の比較ステップ218でシフト・キーが使われていると決定すれば、第2の出力ステップ220では、印加圧力の右側エッジと下側エッジを大文字のキー・ストロークと見なす。もし、左側エッジと上側エッジの位置がシフト・キーのXとY位置と等しくなかったら、第3の比較ステップ222が実行される。
第3の比較ステップ222では、左側エッジと下側エッジがシフト・キーの定まったX位置とY位置であるXSHFとYSHFと等しいかどうか決定する。もし、第3の比較ステップ222で、シフト・キーが使われていると決定すれば、アルゴリズム210は第3の出力ステップ224を実行する。出力ステップ224では、印加圧力の右側エッジと上側エッジを大文字キー・ストロークと見なす。もし、右側エッジと上側エッジの位置がシフト・キーのXとY位置と等しくなかったら、複数のキーが押されているどうか決定する第4の比較ステップが実行される。
第4と第5の比較ステップ226、228はそれぞれ、キー・ロールオーバが発生したかどうか決定する。もし、左側エッジと右側エッジ間の差の絶対値が前設定されている間隔閾値DTHRより大きいなら、キー・ロールオーバが検出されたことになる。もし、押されたキーボード領域の上側エッジと下側エッジ間の差の絶対値が前設定された間隔閾値より大きければ、キー・ロールオーバが検出されたことになる。
出力ステップ230では、キーロールオーバが検出されず、シフト・キーが押されなかった状態を調べる。押された領域の左側エッジと右側エッジでの平均距離(L+R)/2と、上側エッジと下側エッジでの平均距離(U+D)/2は大文字の論理変数UCと等しいものではない。
勿論、上述した実施例の変形が、あらゆる面で本発明からはずれることなく可能である。
例えば、図2のデジタイザ層は90度よりもむしろ互いに相対する任意の角度で置かれる。図2の例は、長方形の交換可能な機械的オーバレイの下に置かれるデジタイザ・パッド機構である。この例では、2つのデジタイザ層は互いに関連してスタックされる。2つ以上のデジタイザ層が共にスタックされることが可能で、異なる相対的角度で置かれることが可能で、直交X−Y次元よりもむしろ他の方向で接触領域のエッジを検出できる。
多目的キーボードは圧力制御領域の空間的最小化を特徴とする標準デジタイザ・パッドを越えて、機械的テンプレート・オーバレイの無限の変形を組み込み動作させることができる。勿論、異なるオーバレイを組み込むことはプロセッサと交換可能なEPROMの再プログラミングが必要である。
多目的キーボードの追加の実施例では、キーの打つ力に対する可変閾値を持つ。この可変閾値については、キーを押すことがプロセッサの応答を引き起こすための閾値を減少・増加させるために、可変抵抗をデジタイザ・パッドの中に持つことで実現される。
従って、次の請求項は本発明の主旨と請求範囲に入る全ての変形と変更を包含するよう意図されている。
[発明の背景]
本発明は電気的感圧器を用いた多目的キーボード、特に圧力接触領域でのリーデイング・エッジとトレーリング・エッジを検出できる圧力接触領域が空間的に最小であることを特徴とするデジタイザー・パッドを組み込んだキーボードに関する。
デジタイザー・パッドとその機能はよく知られている。
発明者イベントフ他(USP4,739,299,1988年4月19日)とマーガリン(USP4,455,450、1984年6月19日)の米国特許は、デジタイザー・パッドが連続しているかまたはインタリーブした伝導線を持つ対面する伝導パッドを有していることを述べている。そのインタリーブした伝導線はデジタイザー・パッドに対する加圧点のXY座標かXYZ座標を特定することができる。そのようなデジタイザー・パッドは、パッドに対して力を印加するとがった道具を使う。ここで、そのとがった道具はかなり局所化した圧力点を生成する。
しかし、局所化した接触点がさらに広い領域にまで広がり、そして、そこではその近傍の回路線も接触関係になるように押されている場合、圧力が多くの点にかかり曖昧な結果となる。このような例では、力のかかる位置の測定はおおよそ力の重心を用いる。すなわち、〈x〉=∫xF(x)ds/∫F(x)dxここで、〈x〉は力の位置の推定値。
F〈x〉は位置に関する力の分布。
積分は位置検知器の全長にそって行う。
しばしば、重心よりも、圧力を与える物体のリーデイング・エッジとトレーシングエッジの位置を測定することが望まれる。特に、重心志向のデジタイザ・パッドは電気的キーボードで使用するには不利な点を有している。リーデイングとトレーリング圧力エッジの測定は物体のサイズを決定するのに有益であり、さらに動作中の物体の位置の動的測定手段を与える。例えば、人の指がキーボードのキーを押すことを考えてもらいたい。重心を使ったデバイスは同時に押された2つのキーを見分けたり、それら2つのキーの間にある1つのキーを見分けることはできなかった。
コンピュータ、ワードプロセッサ、電話、工業用制御に電気的キーボードを組み込む共通の方法のうちますます増えているものは能動的検知要素としての薄膜スイッチを利用することである。
この薄膜スイッチは単純に印刷されたテンプレート・オーバレイで覆われているか、または従来のキーボードをまねた薄膜上に機械的キー・アクチュエータをもつ。その薄膜スイッチは通常共通の基板上にスイッチ・アレイをもち、そのスイッチ・アレイは必要とされるキーボード・パターンで配置される。普通、キー・ストロークはマイクロプロセッサによって確かめられ、その後、そのマイクロプロセッサは検出されたキー・ストロークをコンピュータの入力バスに合った形に変換する。
デジタイザー・パッドのような電気的感圧デバイスをキーボードに組み込むことは有利な点を持つ。そこでは、このパッドの基本要素はパッド上の偏差が1ポイント以上のものを同時に検出する能力を持つ。なぜなら、能動要素の位置は製造時には決められておらず、ハードウエアかソフトウエアの手段によって再定義することができるからである。
重心位置よりもむしろ、パッドを押す物体のリーデイング・エッジとトレーリング・エッジを測定するデジタイザ・パッドを利用ことはさらに望まれる。
キーボードをサポートしているデジタイザー・パッドは米国特許4739299(発明者:F.N.イベントフ他、1988年、4月19日特許)で記述されている。一般的に、イベントフ他のデジタイザ・パッドは連続しているかインタリーブした伝導線のある対面した伝導パッドを持ち、デジタイザー・パッドに対する点加圧のXY座標かXYZ座標を特定することができる。
米国特許4739299の型の標準XYZデジタイザー・パッドを組み込むことは2つの問題を発生する。第1に、この座標XYZデジタイザー・パッドを使って、キー・ロールオーバの発生を検出できない。同様に、多重のキー・コマンドは検出できない。イベントフ他のXYZデジタイザは圧力の印加された分布の中心に一致する一点を検出して出力する。
キー・ロールオーバを経験することはタイピストにとっては普通で、特に高速でタイピングしている時、最後のキーが完全に解放される前に新たなキーが打たれる時はいつでもキー・ロールオーバを経験する。例えば、標準のタイプライタ・キーボードの配列で、文字“q"と文字“t"のロールオーバはキー“e"を打った時と区別できないであろう。キー・ロールオーバの第1の問題はデジタイザ・パッドのリーデイングとトレーリング・エッジの検知特性の利用によって回避できる。ここで、そのデジタイザ・パッドは接触点からトレーリング・エッジまでの垂直方向と水平方向の距離を計ることができる。
第2の問題は標準のXYZデジタイザ・パッドに関連するもので、2つのキー・コマンド(例えば、大文字の“A"のためのシフト−A)に適用させることができないことである。例えば、標準のキーボード配列で、同時に“シフト”と“X"を押すと、“Z"キーの押下と区別することはできない。
最後に、様々なテンプレート・オーバレイを受け入れることができる多目的キーボードを作ることは最も望まれることであり、それによって、デジタイザ・パッドの接触領域を変えないで違う機能のキーボードを作ることができる。
[発明の要約]
本発明の多目的キーボードはデジタイザ・パッドを用いており、パッドが局所的圧力接触ポイントをもたない物体によって押される場合のキー・ロールオーバと多重キー・コマンドの問題を解決している。
本発明は多様な機能に適応できる多目的キーボードを提供する。このキーボードは以下のもの、すなわち、 XとY次元の両方向にそった圧力接触領域の第1エッジと第2エッジで位置づけられる圧力接触領域の最小化を特徴とするXYZデジタイザ・パッドと、 デジタイザ・パッド上にある、少なくとも1つの交換可能な機械的オーバレイと、 少なくとも1つのアドレス・データバスでデジタイザ・パッドと接続され、アドレス・データバスと各機械的オーバレイのための具体的な信号変換手段から受信したデータから、機械的オーバレイをとうしてデジタイザ・パッドに印加される圧力接触が連続して起こるよう要求するプロセッサと、を有する。
多目的キーボードを提供する方法がまた述べられている。
本発明の多くの有利点のうちの1つは、デジタイザ・パッドの能動領域のなかで、多くの能動的検知要素パターンのキーと他の機能を配列できる能力にある。パッドの境界上の位置の間に必要な境界はない。ここで、標準のXYZデジタイザ・パッド上でみられるスイッチ要素の機械的レイアウトに反するように、パッドの境界をハードウエアかソフトウエアで再定義することはできない。
様々なモデルのキーボードとキー配列を統合することの有利点は、製造者が組み立てるキーボードの各モデルにたいし、別々の薄膜スイッチをアセンブルする代わりに、ただ一つのデジタイザ・パッドをストックすればよいということである。例えば、左手用と右手用キーボードは、機械的オーバーレイを変え、定義されたキー領域を変えることで製造され、より良いコスト効率の方法で2つの異なるインプリメンテーションができる。
本発明のさらに有効な点は、一切の追加の製造コストなしで、能動領域の適切な再定義と適切なオーバレイ設計より、グラフィックス・パッドや継続制御キーのような非伝統的キーボード機能が多目的キーボードへ組み込みこめることである。
最後に、多目的キーボード上の検知領域を活性化させるのに必要な力は、薄膜機構や機械的キーでは前もって定義されていない。空間的に最小化を特徴とするデジタイザ・パッドで用いられているような感圧抵抗での、連続的な抵抗変化対力の特性は、ハードウエアかソフトウエアのいずれかを使うことで、様々なキー・ストロークの閾値を持たせるようにして利用することができる。
[図面の簡単な説明]
本発明と上記の有利点は、添付図面を含む好適な実施例についての以下の記述から理解できる。添付図面において、 図1Aは、B−Bの横断面を持つ多目的キーボードを示す図である。
図1Bは、デジタル空間的最小化パッドと交換可能なテンプレート・オーバレイを有する多目的キーボードの断面図である。
図2は、交換可能なテンプレート・オーバレイとデジタイザ・パッドの展開図である。
図3Aは、交換可能なテンプレート・オーバレイ上の1つのキーを押すことによって生成される出力の図である。
図3Bは、個々のキーのリーデイング・エッジとトレーリング・エッジがキーを識別するには接近しすぎている場合、交換可能なテンプレート・オーバレイ上の2つのキーを同時に押すことによって生成される出力の図である。
図4は、プロセッサに置かれるソフトウエア・プログラムのマッピング論理のフローチャートである。
[好適な実施例の詳細な説明]
本発明の多目的キーボードはデジタイザ・パッドのような電気的圧力・位置検知器を組み込んだものである。ここで、そのデジタイザ・パッドは、単純なテンプレート・オーバレイのキーボードか、その上に置かれる機械的アクチュエータに印加される点圧力のリーデイングとトレーリングに関する情報を積層感圧抵抗を用いて入力する。
圧力接触領域の空間的最小化を特徴とするデジイタイザ・パッドはリーデイングとトレーリング・エッジの両方を検出する。ここで、そのリーデイングとトレーリング・エッジは方向づけられたインターリーブ回路線によって定義された空間次元で、パッド上での圧力印加領域を囲む。このインターリーブ回路線は、その空間次元で圧力印加領域の境界を特定する。このデジタイザ・パッドは1つかそれ以上のデジタイザ層構造を使う。ここで、その各構造は、他の層のインターリーブ回路線に関して前定義されるか、正規に方向づけられた各層のインターリーブ回路線を持つ。
本発明のデジタイザ・パッドの一実施例は、面の中で互いに直交するように方向ずけられる2つのデジタイザ層構造を組み込んでいる。このパッドの配置はYX両方向に圧力が印加される領域の複数の境界を位置づける。その印加される圧力量は2つのデジタイザ層手段のX−Y面に位置づける。その印加される圧力量は2つのデジタイザ層手段のX−Y面に直交するZ軸方向を定義する。ここで、その2つのデジタイザ層手段は米国特許4739299(発明者:イベントフ、1988年4月19日特許)と米国特許4315238(発明者:イベントフ、1982年2月9日特許)で述べられている感圧抵抗層を利用している。
感圧領域のリーデイングとトレーリング・エッジを完全に検出できるデジタイザ・パッドの一例に、ヤニガー他の特許出願(米国特許出願番号07/308706、タイトル名“圧力接触読込の空間的明確化を特徴とするデジタイザ・パッド"1989年2月9日出願」がある。
マイクロプロセッサを前記ヤニガー他によるデジタイザ・パッドに接続し、デジタイザ・パッドの様々な領域が押される時、マイクロプロセッサのソフトウエアが検出するようにプログラミングすることによって、ある特定のキーを検知された領域と関係づけることで見分けることができる。同じ機械的構造を有する空間的最小化デジタイザ・パッドは、内部接続されたプロセッサによって定義される任意数のキーボードの配置に対応できる。
プロセッサのためのマッピング・ソフトウエアは記憶手段を使って組み込まれるか、従来のプロセッサ・ソフトウエア・プログラムを使って簡単にプログラムできる。このデジタイザ・パッドを使っている本発明の多目的キーボードは次のもの、すなわち、 選択的に積層され方向づけられた1つかそれ以上のデジタイザ層構造と、 所定の配列を有する交換可能なテンプレート・オーバレイと、 空間的最小化デジタイザ・パッドからプロセッサにX座標についての情報を転送するXアドレス情報バスと、 空間的最小化デジタイザ・パッドからプロセッサにY座標についての情報を転送するYアドレス情報バスと、を持つ。このプロセッサは制御手段の指示の下で受信した位置情報を格納または操作することにより、その情報とそのプロセッサ上で前定義された制御機能を実行する。
多目的キーボードの他の実施例は、簡単なソフトウエアの修正により、特定のキーを活性化させる力を変えるもので、プロセッサの応答を引き起こすキーの押下の閾値を変えるものである。
マイクロプロセッサのマッピング・ソフトウエアは記憶手段を使って組み込まれるか、または従来のソフトウエア・プログラムを利用して簡単にプログラムできる。
図1AはB−Bの横断面を持つ本発明の多目的キーボード10の図である。キーボード10は空間的最小化デジタイザ・パッド12をもち、交換可能なテンプレート・オーバレイ14と協調的に関係し、また、その交換可能なテンプレート・オーバレイ14の下にある。任意の個々のキー7に印加されたテンプレート・オーバレイ14上の押されたキー・ストローク16は、デジタイザ・パッド12によって検出される。定義されたキー領域19は、オーバレイ14上のキーストローク領域16の下の小型デジタイザ・パッド12の表面にあり、デジタイザ・パッド12上で方向づけされた座標系18との関連で、その位置アドレスを検出する。例えば、Xアドレス情報バス20は検出された領域のXアドレスを含み、マイクロプロセッサ24にそのXの位置を転送する。このマイクロプロセッサ24は同様に、Y方向で圧力が検出されたアドレス位置のYアドレス情報バス22からYアドレス情報を受信する。従来のソフトウエア・プログラム21は信号の解釈・制御手段26に格納されており、プロセッサ24のためのマッピングソフトウエアである。そして、そのプロセッサ24はデジタイザ・パッド12からXとYアドレス情報バス20と22をそれぞれ経由して受信したXとYアドレスを操作する。
制御手段26は、各々異なるテンプレート・オーバレイやデジタイザ・パッド12と結合して使われる機械的アクチュエータ配列14をもつ多目的キーボード10とは別に変えられうる。このように、制御手段26を取り替えることにより、テンプレート・オーバレイ上の各圧力接点の解釈を指示することができる。
例えば、図1Aで示すように、特定領域16を文字“E"として定義する第1のオーバレイ14の場合には、信号解釈手段26すなわちPROMはバス20と22から受信したXとYアドレス情報をその文字として解釈する。第1のテンプレート・オーバレイ14を第2のテンプレート・オーバレイ14に変えることは、結果として、押された同じ領域16が別の文字となるか、別のコマンド指定となる。ソフトウエア21によってEPROMの中のこの信号解釈手段26を変えることで、違ったオーバレイ14で同じく押された領域16を正しく解釈することができる。オーバレイ14が押される第2の例では、こんどはその文字が“A"として検知される。
図1Bは交換可能なテンプレート・オーバレイを持つ空間的最小化デジタル・パッドを含む多目的キーボードをB−1の線に沿って切ったときの断面図である。分路層11は検知パッド領域29の伝導線に対して、通常は非伝導の関係となるように薄く覆った状態で置かれる。分路層11はマイラや他の柔軟なプラスチックのような絶縁裏板23を使って作ることが可能である。絶縁裏板23は検知パッド領域29に隣接するインターリーブした第1と第2の伝導線に対面するよう配置された表面25を持ち、圧力Fは交換可能なテンプレート・オーバレイ14の選ばれた領域に与えられ、結果的に分路層11の選ばれた領域に与えられる。交換可能なテンプレート・オーバレイ14は多様な個別のキー7と上面8と底面9とをもつ。キー7が力Fで押された時、テンプレート・オーバレイ14は絶縁裏板23の上表面に第1の圧力領域19と第2の接触領域33を形成させる。第2の接触領域33は第1の圧力エッジ13と第2の圧力エッジ17を持つ。ここで、第2の圧力エッジ17は、図2でより明快に示す伝導線のインターリーブした方向づけによって定義されたX次元に沿って、第1の圧力エッジ13と対面している。
図2は交換可能なテンプレート・オーバレイ14と空間的最小化を特徴とするデジタイザ・パッド12を持つ電気的感圧デバイスの展開図である。この例のデジタイザ・パッド12はXアドレス検出構造30とYアドレス検出構造40を組み込んでいる。Xアドレス検出構造30とYアドレスYアドレス検出構造40は、それぞれインターリーブした複数の抵抗ストリップを組み込んであり、その複数の抵抗ストリップはそのストリップの長さに対して抵抗勾配があるという関係をもち、一定間隔離して配置してある。テンプレート・オーバレイ14のキー7にキー・ストローク16のような力Fによって見いだされる圧力は、抵抗性ストリップと多様な層50、48、46を通しXとYアドレス検出構造30、40によって検出される。
感圧合成層はXとYアドレス検出構造の抵抗勾配ストリップを組み込んでおり、アドレス検出構造30の中の第1の抵抗ストリップ36と第2の抵抗ストリップ38から交互に張り出したインターリーブ伝導線32によって定義されたキーボード10の面に対して正常の方向で全体の力を測定する。電圧源37は第1の抵抗ストリップ36の終端とスイッチ42と実用回路44に接続されている。第1の分路層46は絶縁層48の片側49上に置かれた分路合成層47を有し、対面して置かれ、またインターリーブ伝導線32が第1と第2の抵抗ストリップ36と38間に張り出している領域で定義されている検知パッド領域34と対面する関係となっている。
図2で、第2のデジタイザ層40はYアドレス検出構造として機能し、多様なインターリーブ伝導線52を持っている。ここで、インターリーブ伝導線52は第1の抵抗ストリップ54と第2の抵抗ストリップ55から張り出している。検知パッド領域34′は第1の検知パッド領域34とともに整列し張り出しており、また絶縁層48上に示されている。第2の電圧源56からの電圧は第2の抵抗ストリップ55の終端で接続しているスイッチ58と実用回路60と共に、第1の抵抗ストリップ54の終端に供給される。第2の分路層53は第2の分路合成層57を有し、絶縁層48の別の面53と並べられる。ここで絶縁層48は、インターリーブ伝導線52が第1と第2の抵抗ストリップ54、55間に張り出している領域によって定義されている検知パッド領域52と対面する関係になるよう置かれている。
図2の実施例では、インターリーブ伝導線52は、インターリーブ伝導線32が基本的に同じ面のなかの各本質部分から張り出している方向と直交する方向に張り出している。処理のプロセスでは、実行回路44、60とスイッチ58、42は適切な周知の方法で相互作用し調和して働き、検知パッド領域34、34′、34″上のテンプレート・オーバレイ14の下の空間的位置を決めることができる。ヤニガー他の特許07/308706(1989年2月9日出願)との関連で、本出願に組み込まれている圧力接触領域の空間的最小化を特徴とするデジタイザ・パッド12は、第1の次元(X)に従ってエッジ位置を検出する手段を提供するものである。ここでその第1の次元(X)は、第1と第2の伝導線32、52が2つのデジタイザ層30、40をスタックした基本層上で方向づけられる方向に直交する。またここで、そのデジタイザ層30、40は回路線を互いに十分に直交させることができる。デジタイザ・パッド12は2つの直交次元、特にXとY次元に従って接触領域のエッジを検出できる。
図1Bに示されるような分路層のために、例えば米国特許43152338と4739299の手段のような感圧抵抗層を組み込む。そのデジタイザ・パッドは、テンプレート・オーバレイ14を通しデジタイザ・パッド上のZ方向で、下方に押す力の大きさを検出できる。また、下方の力Fの方向に直交する第2の次元で圧力接触領域の対面するエッジが識別される。最後に、ZとX次元の両方に直交する第3の次元(例えば、Y次元)で、接触領域の2つのエッジの位置が明らかになる。
一つのデジタイザ・パッド12のために、初期のキー7の多様なパターンと他の機能をパッド12の上にあるテンプレート・オーバレイ14の能動領域内に定義することが可能である。テンプレート・オーバレイ14の機械的レイアウトはキーボードの設計と製造にとって、もはや拘束要因とはならない。一例として、直線的に配列した64x64個のキーのある機械的オーバレイをもつキーボードは、三角形状に配列した8個の円形キーがあるキーボードに再構成できる。それは、ソフトウエアとマイクロプロセッサ・コードのような関連ファームウエアを変えることによってなされる。
図3Aは、一つのキーが押されることによって生成される出力信号204の時間202対電圧200の関係を示すグラフィック図である。ここで、その一つのキーが押されることは、キーが一定期間203押された時の輪郭のはっきりしたリーデイング・エッジ205とトレーリング207をもつデジタイザ・パッドとプロセッサによって監視される。電圧信号204はキー“A"として、信号解釈器26によって解釈される。
図3Bは、出力信号204、206の時間201対電圧200のグラフィック図である。その出力信号204、206はテンプレート・オーバレイ上の2つのキーを同時に押すことによって生成される。ここで、個々のキーのリーデイング・エッジとトレーリング・エッジは区別するには接近しすぎている。
図3Bでは、例えば“A"キーが括弧206でくくられた区間で示す一定期間押されている時、そのキーのリーデイング205とトレーリング207をもつ信号204を生成する。“D"キーが括弧213でくくられた区間で示す一定期間押されている時、そのキーはリーデイング209とトレーリング211をもつ信号206を生成する。そして、“A"と“D"キーが同時に押された時、それらの信号204、206は各々括弧215でくくられた区間でオーバラップする。その“A"と“D"キーが押された時、その各々は異った電圧レベルを生成する。その電圧信号の大きさはデジタイザ・パッドのキーの位置に依存する。
2つのキーが同時にたたかれた時、ロールオーバが発生する。例えば、前に押されているキーが放される前に、ある別のキーが押された時のような場合に発生すうる。図3では、キー・ロールオーバの例を示している。ここでは、“A"キーが先に押されて、それから同時に“D"キーが押されているように見える。ソフトウエアは、出力信号204、206のリーデイング・エッジとトレーリング・エッジで定義されるキーボードや機械的オーバレイのある領域が押されたことを認識するようプログラムされる。“A"キーをたたくと、結果としてリーデイング・エッジが第2のキーのトレーリング・エッジに相対的に接近する。
図1Aに示されているプロセッサ24は、2つのキーのトレーリング・エッジとリーデイング・エッジ間の間隔が前定義された閾値より小さいならば、単独のキー・ストロークとして検知するようにプログラムされている。そして、2つのキーのトレーリング・エッジとリーデイング・エッジ間の間隔が前定義された閾値より大きいならば、プロセッサは自動的に2つのキーが同時に押されたとみなし、同時に押されている期間の括弧でくくられた区間215を無視する。この例では、“A"キーが解放された時、“D"キー信号206のリーデイング・エッジ209はすぐにトレーリング・エッジ211の方に移動し、間隔を狭め、押されたキーが“D"キーであると解釈されることになる。曖昧な信号を生成することなし、ロールオーバ効果を捉えることができる。
特殊制御キーが押され、他方では“control"、“shift"、“alt"キーと文字キーのような他標準キーボードのキーが押されている時、プロセッサはそれらを区別する適切な制御信号を生成するようプログラムされる必要がある。
図4は、図1Aのプロセッサ24に格納されたソフトウエア・プログラムの推薦するマッピング論理のフローチャートである。この論理図210は交換可能なテンプレート・オーバレイ上で押されたキーのリーデイング・エッジとトレーリング・エッジを決めるものである。
図4は、図1Aに示されているデジタイザ・パッド12から入力したデータを処理する論理アルゴリズム210の一例である。図3Bに示す電圧信号は、デジタイザ・パッド上のキーパッド・オーバレイの個別キー印加された圧力に応答して生成される。
次に示す2つの例では、2つのキーを同時に押すことができる。第1にタイピストは第2の押された文字キーを大文字として打つためにシフト・キーを押す。第2にタイピストはとても速く同時に2つのキーを押すため、キーロールオーバが発生する。2つのキーを同時に押すことによって生成される電圧信号は論理アルゴリズム210によってプロセッサで解析されるデータを作る。論理アルゴリズム210は、このデータから、タイピストがある文字キーを大文字にしているかどうか、すなわちキーロールオーバが発生しているかどうかを決定しなければならない。
図4の入力ステップ212では、論理アルゴリズム210への入力データとして、押されたキーの左側エッジの位置のLと、押されたキーの右側エッジの位置のRと、押されたキーの上側エッジの位置のUと、押されたキーの下側エッジの位置のDと、押されるキーへ印加される圧力であるPを含む。論理アルゴリズム210の中でプログラムされている定数は、キーボードのシフト・キーのX位置のXSHFと、キーボードのシフト・キーのY位置のYSHFと、キーをたたいたことを検知するため前設定された圧力閾値であるPTHRと、複数のキーをたたいたことを検知するため前設定された間隔閾値であるDTHRである。アルゴリズム210のための変数は、大文字の論理変数であるUCである。
第1の比較ステップ214では、あるキーが押されているかどうか決定する。検知される印加圧力Pは、キー・ストロークPTHRの検知のため、圧力閾値と比較される。もし、検知される印加圧力Pが圧力閾値より大きければ、PHTRの第2と第3の比較ステップが実行される。もし、検知される印加圧力Pが圧力閾値PHTRより小さければ、キー・ストロークは検知されず、入力データは第1の出力ステップ216で無視される。
第2と第3の比較ステップ218、222はそれぞれ、シフト・キーが押されているかどうか決定する。もし、シフト・キーが使われていれば、そのデータは大文字のキー・ストローク、すなわち大文字として解釈される。特に、第2の比較ステップ218では、キー・ストロークの左側エッジと上側エッジの位置は、シフト・キーの定まったXとY位置であるXSHF,YSHFと比較される。もし、第2の比較ステップ218でシフト・キーが使われていると決定すれば、第2の出力ステップ220では、印加圧力の右側エッジと下側エッジを大文字のキー・ストロークと見なす。もし、左側エッジと上側エッジの位置がシフト・キーのXとY位置と等しくなかったら、第3の比較ステップ222が実行される。
第3の比較ステップ222では、左側エッジと下側エッジがシフト・キーの定まったX位置とY位置であるXSHFとYSHFと等しいかどうか決定する。もし、第3の比較ステップ222で、シフト・キーが使われていると決定すれば、アルゴリズム210は第3の出力ステップ224を実行する。出力ステップ224では、印加圧力の右側エッジと上側エッジを大文字キー・ストロークと見なす。もし、右側エッジと上側エッジの位置がシフト・キーのXとY位置と等しくなかったら、複数のキーが押されているどうか決定する第4の比較ステップが実行される。
第4と第5の比較ステップ226、228はそれぞれ、キー・ロールオーバが発生したかどうか決定する。もし、左側エッジと右側エッジ間の差の絶対値が前設定されている間隔閾値DTHRより大きいなら、キー・ロールオーバが検出されたことになる。もし、押されたキーボード領域の上側エッジと下側エッジ間の差の絶対値が前設定された間隔閾値より大きければ、キー・ロールオーバが検出されたことになる。
出力ステップ230では、キーロールオーバが検出されず、シフト・キーが押されなかった状態を調べる。押された領域の左側エッジと右側エッジでの平均距離(L+R)/2と、上側エッジと下側エッジでの平均距離(U+D)/2は大文字の論理変数UCと等しいものではない。
勿論、上述した実施例の変形が、あらゆる面で本発明からはずれることなく可能である。
例えば、図2のデジタイザ層は90度よりもむしろ互いに相対する任意の角度で置かれる。図2の例は、長方形の交換可能な機械的オーバレイの下に置かれるデジタイザ・パッド機構である。この例では、2つのデジタイザ層は互いに関連してスタックされる。2つ以上のデジタイザ層が共にスタックされることが可能で、異なる相対的角度で置かれることが可能で、直交X−Y次元よりもむしろ他の方向で接触領域のエッジを検出できる。
多目的キーボードは圧力制御領域の空間的最小化を特徴とする標準デジタイザ・パッドを越えて、機械的テンプレート・オーバレイの無限の変形を組み込み動作させることができる。勿論、異なるオーバレイを組み込むことはプロセッサと交換可能なEPROMの再プログラミングが必要である。
多目的キーボードの追加の実施例では、キーの打つ力に対する可変閾値を持つ。この可変閾値については、キーを押すことがプロセッサの応答を引き起こすための閾値を減少・増加させるために、可変抵抗をデジタイザ・パッドの中に持つことで実現される。
従って、次の請求項は本発明の主旨と請求範囲に入る全ての変形と変更を包含するよう意図されている。
【特許請求の範囲】
【請求項1】少なくとも1つの圧力接触領域の押下によって生成される電気信号パルスのリーデイング・エッジとトレーリング・エッジの両方を検知する電気的感圧手段と、少なくとも1つの方向に関する位置データを前記電気的感圧手段から受信し、前記位置データを解釈するプログラム可能な処理手段と、前記処理手段と連係し、前記処理手段を制御するプログラム可能な制御手段と、前記検知される方向に関し、前記位置データを前記電気的感圧手段から前記処理手段へ転送する少なくとも1つの位置データ転送手段と、前記電気的感圧手段と連係し、前記少なくとも1つの圧力接触領域が押されたことを検知する交換可能な能動的検知要素手段とを有することを特徴とする多目的キーボード。
【請求項2】前記電気的感圧手段は、前記圧力接触領域を空間的に最小にするデジタイザ・パッドであることを特徴とする請求項1の多目的キーボード。
【請求項3】前記プログラム可能な処理手段は、さらに前記圧力接触領域で、リーデイング・エッジとトレーリング・エッジの前記1つの方向に関する位置を決めることができることを特徴とする請求項1の多目的キーボード。
【請求項4】前記プログラム可能な制御手段はEPROMであることを特徴とする請求項1の多目的キーボード。
【請求項5】前記位置データ転送手段はデータバスであることを特徴とする請求項1の多目的キーボード。
【請求項6】前記交換可能な能動的検知要素の手段はテンプレート・オーバレイであることを特徴とする請求項1の多目的キーボード。
【請求項7】前記交換可能な能動的検知要素の手段は機械的キー・アクチュエータであることを特徴とする請求項1の多目的キーボード。
【請求項8】前記電気的感圧手段は、さらに1つの平面で互いに直交するように配置される、少なくとも2つのデジタイザ層構造を有し、前記デジタイザ層構造はさらに可変抵抗のインターリーブ回路線を有することを特徴とする請求項1の多目的キーボード。
【請求項9】前記プログラム可能な処理手段は、さらに打たれたキーの検出器にトリガをかけるのに必要なアクティベーション圧力の値を変えるようプログラムできることを特徴とする請求項1の多目的キーボード。
【請求項10】交換可能なアクチュエータを用いて、デジタイザ・パッドの少なくとも1つの圧力接触領域が押されることを検知し、前記交換可能なアクチュエータと連係して、前記少なくとも1つの圧力接触領域の押下によって生成される電気信号パルスのリーデイング・エッジとトレーリング・エッジの両方を検出し、前記検出に基づいて、少なくとも1つの方向に関する位置データを受信し、前記検知される方向に関し、前記位置データを前記デジタイザ・パッドからプログラム可能なプロセッサに少なくとも1つのバスを介して転送し、前記プロセッサによって前記位置データを解釈し、前記プロセッサと協働して動作するプログラム可能なコントローラによって、前記プロセッサを制御することを特徴とする多目的キーボードの動作の制御方法。
【請求項11】少なくとも1つの圧力接触領域の押下によって生成される電気信号パルスのリーデイング・エッジとトレーリング・エッジの両方を検出できるデジタイザ・パッドと、前記デジタイザ・パッドから少なくとも1つの方向に関する位置データを入力し、さらに前記位置データを解釈し、前記位置データと所定の位置とを結び付けるプログラム可能なプロセッサと、前記プロセッサと連係し前記プロセッサを制御するプログラム可能なコントローラと、前記デジタイザパッドから前記プロセッサへ、前記方向に関する前記位置データを転送できる、少なくとも1つの位置データ転送バスと、前記デジタイザ・パッドと連係し、前記少なくとも1つの圧力接触領域が押されて動作する交換可能な機械的アクチュエータとを有することを特徴とする多目的キーボード。
【請求項12】前記交換可能な機械的アクチュエータは、印刷されたテンプレート・オーバレイであることを特徴とする請求項11の多目的キーボード。
【請求項13】前記交換可能な機械的アクチュエータは、機械的キーであることを特徴とする請求項11の多目的キーボード。
【請求項14】前記デジタイザ・パッドは、各層構造が互いの構造に相対して所定の配置に位置決めされたインターリーブ回路線を持つ少なくとも2つのデジタイザ層構造を有することを特徴とする請求項11の多目的キーボード。
【請求項15】前記プログラム可能な制御器は、EPROMであることを特徴とする請求項11の多目的キーボード。
【請求項16】前記プロセッサは、マイクロプロセッサであることを特徴とする請求項11の多目的キーボード。
【請求項17】前記圧力接触領域が、前記交換可能な機械的アクチュエータの領域が押されていることを指示する応答を、前記プログラム可能なプロセッサにおいて引き起こすための閾値を、前記プログラム可能なプロセッサが変更できるようにプログラムされていることを特徴とする請求項11の多目的キーボード。
【請求項1】少なくとも1つの圧力接触領域の押下によって生成される電気信号パルスのリーデイング・エッジとトレーリング・エッジの両方を検知する電気的感圧手段と、少なくとも1つの方向に関する位置データを前記電気的感圧手段から受信し、前記位置データを解釈するプログラム可能な処理手段と、前記処理手段と連係し、前記処理手段を制御するプログラム可能な制御手段と、前記検知される方向に関し、前記位置データを前記電気的感圧手段から前記処理手段へ転送する少なくとも1つの位置データ転送手段と、前記電気的感圧手段と連係し、前記少なくとも1つの圧力接触領域が押されたことを検知する交換可能な能動的検知要素手段とを有することを特徴とする多目的キーボード。
【請求項2】前記電気的感圧手段は、前記圧力接触領域を空間的に最小にするデジタイザ・パッドであることを特徴とする請求項1の多目的キーボード。
【請求項3】前記プログラム可能な処理手段は、さらに前記圧力接触領域で、リーデイング・エッジとトレーリング・エッジの前記1つの方向に関する位置を決めることができることを特徴とする請求項1の多目的キーボード。
【請求項4】前記プログラム可能な制御手段はEPROMであることを特徴とする請求項1の多目的キーボード。
【請求項5】前記位置データ転送手段はデータバスであることを特徴とする請求項1の多目的キーボード。
【請求項6】前記交換可能な能動的検知要素の手段はテンプレート・オーバレイであることを特徴とする請求項1の多目的キーボード。
【請求項7】前記交換可能な能動的検知要素の手段は機械的キー・アクチュエータであることを特徴とする請求項1の多目的キーボード。
【請求項8】前記電気的感圧手段は、さらに1つの平面で互いに直交するように配置される、少なくとも2つのデジタイザ層構造を有し、前記デジタイザ層構造はさらに可変抵抗のインターリーブ回路線を有することを特徴とする請求項1の多目的キーボード。
【請求項9】前記プログラム可能な処理手段は、さらに打たれたキーの検出器にトリガをかけるのに必要なアクティベーション圧力の値を変えるようプログラムできることを特徴とする請求項1の多目的キーボード。
【請求項10】交換可能なアクチュエータを用いて、デジタイザ・パッドの少なくとも1つの圧力接触領域が押されることを検知し、前記交換可能なアクチュエータと連係して、前記少なくとも1つの圧力接触領域の押下によって生成される電気信号パルスのリーデイング・エッジとトレーリング・エッジの両方を検出し、前記検出に基づいて、少なくとも1つの方向に関する位置データを受信し、前記検知される方向に関し、前記位置データを前記デジタイザ・パッドからプログラム可能なプロセッサに少なくとも1つのバスを介して転送し、前記プロセッサによって前記位置データを解釈し、前記プロセッサと協働して動作するプログラム可能なコントローラによって、前記プロセッサを制御することを特徴とする多目的キーボードの動作の制御方法。
【請求項11】少なくとも1つの圧力接触領域の押下によって生成される電気信号パルスのリーデイング・エッジとトレーリング・エッジの両方を検出できるデジタイザ・パッドと、前記デジタイザ・パッドから少なくとも1つの方向に関する位置データを入力し、さらに前記位置データを解釈し、前記位置データと所定の位置とを結び付けるプログラム可能なプロセッサと、前記プロセッサと連係し前記プロセッサを制御するプログラム可能なコントローラと、前記デジタイザパッドから前記プロセッサへ、前記方向に関する前記位置データを転送できる、少なくとも1つの位置データ転送バスと、前記デジタイザ・パッドと連係し、前記少なくとも1つの圧力接触領域が押されて動作する交換可能な機械的アクチュエータとを有することを特徴とする多目的キーボード。
【請求項12】前記交換可能な機械的アクチュエータは、印刷されたテンプレート・オーバレイであることを特徴とする請求項11の多目的キーボード。
【請求項13】前記交換可能な機械的アクチュエータは、機械的キーであることを特徴とする請求項11の多目的キーボード。
【請求項14】前記デジタイザ・パッドは、各層構造が互いの構造に相対して所定の配置に位置決めされたインターリーブ回路線を持つ少なくとも2つのデジタイザ層構造を有することを特徴とする請求項11の多目的キーボード。
【請求項15】前記プログラム可能な制御器は、EPROMであることを特徴とする請求項11の多目的キーボード。
【請求項16】前記プロセッサは、マイクロプロセッサであることを特徴とする請求項11の多目的キーボード。
【請求項17】前記圧力接触領域が、前記交換可能な機械的アクチュエータの領域が押されていることを指示する応答を、前記プログラム可能なプロセッサにおいて引き起こすための閾値を、前記プログラム可能なプロセッサが変更できるようにプログラムされていることを特徴とする請求項11の多目的キーボード。
【第1A図】


【第1B図】
【第3A図】
【第2図】
【第3B図】
【第4図】

【第1B図】
【第3A図】
【第2図】
【第3B図】
【第4図】
【特許番号】第2787959号
【登録日】平成10年(1998)6月5日
【発行日】平成10年(1998)8月20日
【国際特許分類】
【出願番号】特願平3−517828
【出願日】平成3年(1991)8月19日
【公表番号】特表平6−502507
【公表日】平成6年(1994)3月17日
【国際出願番号】PCT/US91/06253
【国際公開番号】WO92/07345
【国際公開日】平成4年(1992)4月30日
【審査請求日】平成9年(1997)4月14日
【早期審査対象出願】早期審査対象出願
【出願人】(999999999)インターリンク エレクトロニクス, インク.
【登録日】平成10年(1998)6月5日
【発行日】平成10年(1998)8月20日
【国際特許分類】
【出願日】平成3年(1991)8月19日
【公表番号】特表平6−502507
【公表日】平成6年(1994)3月17日
【国際出願番号】PCT/US91/06253
【国際公開番号】WO92/07345
【国際公開日】平成4年(1992)4月30日
【審査請求日】平成9年(1997)4月14日
【早期審査対象出願】早期審査対象出願
【出願人】(999999999)インターリンク エレクトロニクス, インク.
[ Back to top ]