
音波センサおよびそれを備えた粘弾性測定装置
【課題】被測定物との間の接触状態を視認可能な音波センサおよびそれを備えた粘弾性測定装置を提供する。
【解決手段】光取込窓4aは、遅延部材4と被測定物SMPとの境界に気泡BLが存在する場合には、気泡BLによって入射光Linが全反射されるとともに、気泡BLが存在しない場合には、被測定物SMPによって入射光Linが反射されるように、取込んだ光を接合部へ導く。このような入射光Linが取込まれることによって、気泡BLが存在する領域で生成された観測光Lobは、入射光Linと略一致する一方、気泡BLが存在しない領域で生成された観測光Lobには、被測定物SMPの映像情報が含まれる。したがって、介在物BLが存在するか否かに応じて、観測光Lobには有意な差異が生じるため、遅延部材4と被測定物SMPとの接触状態を視認できる。
【解決手段】光取込窓4aは、遅延部材4と被測定物SMPとの境界に気泡BLが存在する場合には、気泡BLによって入射光Linが全反射されるとともに、気泡BLが存在しない場合には、被測定物SMPによって入射光Linが反射されるように、取込んだ光を接合部へ導く。このような入射光Linが取込まれることによって、気泡BLが存在する領域で生成された観測光Lobは、入射光Linと略一致する一方、気泡BLが存在しない領域で生成された観測光Lobには、被測定物SMPの映像情報が含まれる。したがって、介在物BLが存在するか否かに応じて、観測光Lobには有意な差異が生じるため、遅延部材4と被測定物SMPとの接触状態を視認できる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は被測定物に音波を放射するとともに、被測定物で反射される音波に応じた検出信号を外部出力する音波センサに関し、特に、音波センサと被測定物との接触状態を視認可能とする技術に関するものである。
【背景技術】
【0002】
物質の物性を評価する指標の1つに粘弾性特性がある。粘弾性とは、与えられる応力に比例してひずみを生じる弾性、および与える応力を受けて粘性流動を生じる粘性を併せ持つ物性である。
【0003】
近年、音波(特に、超音波)を用いて、被測定物の粘弾性特性を測定する方法が提案されている。このような、音波を用いた粘弾性特性の測定方法では、被測定物に音波を放射するとともに、当該放射された音波が被測定物で反射されて生じる音波を、基準状態において反射されて生じる音波と比較することで被測定物の粘弾性特性が取得される。
【0004】
このような粘弾性特性の測定方法には、遅延部材を備える音波センサが使用される。遅延部材は、反射されて生じる音波を正確に検出するために、被測定物へ放射される音波と、被測定物で反射されて生じる音波とを時間的に分離させる部材である。すなわち、トランスデューサなどから放射された音波は、遅延部材を伝搬して被測定物へ入射するとともに、被測定物で反射された音波は、再度遅延部材を伝搬してトランスデューサへ入射する。
【0005】
ところで、音波センサと被測定物との間に気泡などが介在すると、誤差の発生原因となるので、両者の間は可能な限り密着させることが望ましい。一例として、特開平11−030512号公報(特許文献1)には、被測定物表面に遅延材表面を追従、密着させることを可能にした厚さ計プローブが開示されている。この厚さ計プローブでは、センサユニットおよび受け金具が軸上の点で支持金具の端部と接触するように構成して、保持する外筒の傾きに影響されることなく遅延材表面が被測定物表面に追従、密着される。
【特許文献1】特開平11−030512号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
粘弾性特性の測定対象となる被測定物は、一例としてパン生地などであり、その表面は固形化されたものではなく、比較的柔らかい場合が多い。そのため、特開平11−030512号公報(特許文献1)に開示される厚さ計プローブと同様の構成を有する音波センサを用いたとしても、高い精度で測定を行なうことができなかった。むしろ、被測定物に応じて、音波センサと被測定物との接触の程度を確認しながら、測定を行なうことが重要である。
【0007】
しかしながら、特開平11−030512号公報(特許文献1)に開示される厚さ計プローブを含む、従来の音波センサでは、音波センサと被測定物との接触状態を視認可能な構成とはなっていなかった。
【0008】
そこで、この発明は、かかる問題を解決するためになされたものであり、その目的は、被測定物との間の接触状態を視認可能な音波センサおよびそれを備えた粘弾性測定装置を提供することである。
【課題を解決するための手段】
【0009】
この発明によれば、被測定物に対して第1の音波を放射するとともに、被測定物で反射されて生じる第2の音波に応じた検出信号を外部出力するように構成された音波センサである。そして、音波センサは、電気信号の入力に応答して第1の音波を発生するとともに、第2の音波の入力に応答して電気信号を発生する電気音波変換部と、電気音波変換部と被測定物との間に介挿され、第1および第2の音波に対して伝搬遅延を生じさせるための遅延部材とを備える。さらに、遅延部材は、光波を伝搬可能な媒質で構成されるとともに、部材外部からの第1の光波を取込んで、当該第1の光波を遅延部材と被測定物との接合部に向けて伝搬させるための光取込窓と、第1の光波が接合部で反射されて生じる第2の光波を部材外部へ取出すための光取出窓とが形成され、光取込窓は、遅延部材と被測定物との間に介在し得る介在物に応じて、生成される第2の光波が変化するように、第1の光波を接合部へ導く。
【0010】
この発明によれば、遅延部材には、部材外部からの第1の光波を取込んで遅延部材と被測定物との接合部に向けて伝搬させるための光取込窓と、第1の光波が接合部で反射されて生じる第2の光波を部材外部へ取出すための光取出窓とが形成される。さらに、光取込窓は、遅延部材と被測定物との間に介在し得る介在物に応じて、生成される第2の光波が変化するように、第1の光波を接合部へ導く。これにより、遅延部材と被測定物との間に介在する気泡などの介在物の有無に応じた映像情報を容易に得ることができるので、音波センサと被測定物との接触状態の視認が可能となる。
【0011】
好ましくは、光取込窓は、第1の光波が遅延部材と介在物との境界に到達すると、遅延部材の内部に維持されたまま反射される一方、第1の光波が遅延部材と被測定物との境界に到達すると、遅延部材を通過して被測定物へ入射するように、第1の光波を接合部へ導く。
【0012】
また好ましくは、光取込窓は、遅延部材と被測定物との境界面に対する第1の光波の入射角が、遅延部材の屈折率と介在物の屈折率とに応じて定まる臨界角以上となるように、第1の光波を接合部へ導く。
【0013】
また好ましくは、光取込窓は、第1の光波が遅延部材と介在物との境界に到達すると、遅延部材を通過して介在物へ入射した後、介在物と被測定物との境界で反射されるように、第1の光波を接合部へ導く。
【0014】
また好ましくは、光取込窓は、遅延部材と被測定物との境界面に対する第1の光波の入射角が、遅延部材の屈折率と介在物の屈折率とに応じて定まる臨界角より小さくなるように、第1の光波を接合部へ導く。
【0015】
さらに好ましくは、光取込窓は、遅延部材と被測定物との境界面内の第1の音波が入射する領域に含まれる各点において、介在物に応じた第2の光波を生成するための第1の光波を取込み可能に構成され、光取出窓は、第1の音波が入射する領域に含まれる各々の点において生成される第2の光波をいずれも取出し可能に構成される。
また好ましくは、遅延部材の屈折率は、被測定物の屈折率に比較して小さい。
【0016】
また好ましくは、音波センサは、遅延部材を通過した第1の音波が被測定物に入射する領域を表示するための表示光を発生する表示光発生部をさらに備える。
【0017】
また好ましくは、音波センサは、光取込窓に近接して配置され、第1の光波を生成して光取込窓へ与えるための光源部をさらに備える。
【0018】
また好ましくは、音波センサは、光取出窓に近接して配置され、光取出窓から取出された第2の光波を受光して、受光した第2の光波に含まれる映像情報を出力するためのカメラ部と、カメラ部からの映像情報に基づいて、接合部における遅延部材および被測定物の少なくとも一方の状態を判断するための解析装置とをさらに備える。
【0019】
またこの発明によれば、上述のいずれかの音波センサと、音波センサから出力される検出信号と、予め定められた基準音波に基づく基準値との比較により、被測定物の粘弾性特性を取得するための制御装置とを備える粘弾性測定装置である。
【発明の効果】
【0020】
この発明によれば、被測定物との間の接触状態を視認可能な音波センサおよびそれを備えた粘弾性測定装置を実現できる。
【発明を実施するための最良の形態】
【0021】
この発明の実施の形態について、図面を参照しながら詳細に説明する。なお、図中の同一または相当部分については、同一符号を付してその説明は繰返さない。
[実施の形態1]
【0022】
図1は、この発明の実施の形態1に従う音波センサ101を備える粘弾性測定装置100の概略構成図である。
【0023】
図1を参照して、粘弾性測定装置100は、被測定物SMPとの接触状態を保ちながら、その粘弾性特性を測定するための装置である。なお、本明細書において、粘弾性特性とは、貯蔵弾性率、損失弾性率および損失正接のうち少なくとも1つ以上で規定される物質の特性の総称を意味する。そして、粘弾性測定装置100は、制御装置1と、音波センサ101とを備える。
【0024】
音波センサ101は、被測定物SMPと接合するように配置され、被測定物SMPに対して音波を放射する(以下、音波センサ101から被測定物SMPへ放射される音波を「入射音波」とも称す。)とともに、被測定物SMPで反射されて生じる音波(以下、入射音波が被測定物SMPで反射されて生じる音波を「反射音波」とも称す。)に応じた検出信号を外部出力するように構成される。なお、入射音波および反射音波としては、可聴帯域以上の周波数を有する超音波が好ましい。
【0025】
制御装置1は、音波センサ101から出力される検出信号と、予め定められた基準音波に基づく基準値との比較により、被測定物SMPの粘弾性特性を取得する。
【0026】
音波センサ101は、送受信回路2と、トランスデューサ3と、遅延部材4とを含む。
【0027】
送受信回路2は、制御装置1から与えられる指令に応答して、トランスデューサ3による入射音波の照射を制御するとともに、トランスデューサ3により受信される反射音波に応じた電気信号を制御装置1へ出力する。
【0028】
トランスデューサ3は、送受信回路2からの電気信号の入力に応答して入射音波を発生するとともに、反射音波の入力に応答して電気信号を発生する電気音波変換部であり、一例として、チタン酸ジルコン酸鉛などの圧電素子などからなる。
【0029】
遅延部材4は、バッファ(Buffer)部材などとも称され、トランスデューサ3と被測定物SMPとの間に介挿され、入射音波および反射音波に対して伝搬遅延を生じさせる。さらに、この発明の実施の形態1に従う遅延部材4は、可視光などの観測用の光波を伝搬可能な媒質で構成される。
【0030】
遅延部材4と被測定物SMPとの間には気泡などの介在物が存在し得る。このような介在物の存在によって、遅延部材4と被測定物SMPとの密着度は低下する。そこで、この発明に係る遅延部材4は、遅延部材4と被測定物SMPとの接触状態、すなわち介在物の有無を視認可能に構成される。
【0031】
具体的には、遅延部材4には、部材外部からの光波を取込んで、当該取込んだ光波を遅延部材4と被測定物SMPとの接合部に向けて伝搬させるための光取込窓と、伝搬した光波が遅延部材4と被測定物SMPとの接合部で反射されて生じる光波を部材外部へ取出すための光取出窓とが形成される。ここで、「接合部」とは、遅延部材4と被測定物SMPとの境界面、および当該境界面に近接する遅延部材4および被測定物SMP、ならびに遅延部材4と被測定物SMPとの間に存在し得る介在物を総称的に示す用語である。
【0032】
なお、以下の説明においては、光取込窓によって部材外部から取込まれる光波を「入射光」とも称し、光取出窓によって部材外部へ取出される光波を「観測光」とも称す。
【0033】
そして、光取込窓は、遅延部材4と被測定物SMPとの境界に介在物が存在する場合には、当該介在物によって入射光が全反射されるとともに、介在物が存在しない場合には、被測定物SMPによって入射光が反射されるように、取込んだ光を接合部へ導く。このような入射光が取込まれることによって、介在物が存在する領域で生成された観測光は、入射光と略一致する一方、介在物が存在しない領域で生成された観測光には、被測定物SMPの映像情報が含まれる。したがって、介在物が存在するか否かに応じて、観測光には有意な差異が生じるため、遅延部材4と被測定物SMPとの接触状態を視認できる。
【0034】
要約すると、光取込窓は、入射光が遅延部材4と介在物との境界に到達すると、遅延部材4の内部に維持されたまま反射されるとともに、入射光が遅延部材4と被測定物SMPとの境界に到達すると、遅延部材4を通過して被測定物SMPへ入射するように、入射光を遅延部材4と被測定物SMPとの接合部へ導く。すなわち、光取込窓は、遅延部材4と被測定物SMPとの境界面に対する入射光の入射角が、遅延部材4の屈折率と介在物の屈折率とに応じて定まる臨界角以上となるように、入射光を当該接合部へ導く。さらに、生成された観測光は、光取出窓によって部材外部へ取出され、接触状態が視認される。
【0035】
なお、視認を行なう主体に応じて、入射光として用いる光波の波長帯域を適切に選択すればよい。すなわち、人間による視認(目視)が行なわれる場合には、入射光として可視光線を用い、CCD(Charged Coupled Device)などで構成された受光部などによって目視が行なわれる場合には、当該受光部の受光感度に適した波長帯域を含む光波を入射光として用いることが望ましい。
【0036】
また、粘弾性測定の対象となる被測定物SMPとしては、遅延部材4と接合可能な大きさを有するものであればいずれでもよい。
図2は、粘弾性測定装置100の構成をより詳細に示す図である。
【0037】
図2を参照して、制御装置1は、たとえば、パーソナルコンピュータなどで構成され、入力部18と、時間データメモリ部12と、記憶部14と、演算部10と、表示出力部16とからなる。
【0038】
入力部18は、ユーザなどからの外部指令を受け、その外部指令を演算部10へ出力する。一例として、入力部18は、操作ボタン、キーボード、マウス、タッチパネルなどからなる。
【0039】
時間データメモリ部12は、送受信回路2を介して出力されるトランスデューサ3からの検出信号の時間波形データを所定の周期で格納する。なお、時間データメモリ部12は、演算部10からの要求に応じて、時間波形データを格納する周期を変更可能に構成される。
【0040】
記憶部14は、演算部10を介して取得された基準値を格納し、演算部10からの要求に応じて、その格納する基準値を読出す。そして、記憶部14は、演算部10で測定される粘弾性特性を順次格納する。
【0041】
演算部10は、入力部18を介して、外部からプロセス開始指令を受けると、送受信回路2へ放射指令を与え、トランスデューサ3から入射音波を放射させる。そして、演算部10は、時間データメモリ部12に格納される反射音波の時間波形データを読出し、一例として、高速フーリエ変換処理(Fast Fourier Transform;以下、FFT処理とも称す)のような周波数解析処理を行ない、各周波数における振幅値および位相を取得する。続いて、演算部10は、記憶部14に予め格納されている基準値を読出し、その基準値と取得した検出信号の各周波数における振幅値および位相とを比較することで、被測定物SMPの粘弾性特性を測定する。さらに、演算部10は、その測定した被測定物SMPの粘弾性特性を表示出力部16または/および記憶部14へ出力する。したがって、トランスデューサ3から1回の入射音波の放射により、演算部10は、その放射音波に含まれる周波数帯域の各周波数における被測定物SMPの粘弾性特性を測定できる。
【0042】
表示出力部16は、演算部10によって測定される被測定物SMPの粘弾性特性や、演算部10から出力される各指令情報などを表示または/およびそのデータを外部へ出力する。表示出力部16が表示を行なう場合には、一例として、液晶ディスプレイやプラズマディスプレイなどの表示装置からなる。また、表示出力部16がデータを外部へ出力を行なう場合には、一例として、USB(Universal Serial Bus)、RS−232C(Recommended Standard 232 version C)、IEEE(Institute of Electrical and Electronic Engineers)1394、SCSI(Small Computer System Interface)、イーサネット(登録商標)、IEEE1284(パラレルポート)などの規格に対応するインターフェイスなどからなる。
【0043】
一方、送受信回路2は、送信制御回路20と、送信回路22と、方向整合器24と、受信回路26と、信号処理回路28とからなる。
【0044】
送信制御回路20は、制御装置1からの放射指令を受けると、放射する入射音波を生成するための生成信号を送信回路22へ出力する。たとえば、送信制御回路20は、パルス状の入射音波を生成するためのパルス信号や、特定の周波数成分を含む入射音波を生成するための正弦波信号などを出力する。また、送信制御回路20は、生成信号の出力タイミングを通知するトリガ信号を受信回路26へ出力する。
【0045】
送信回路22は、送信制御回路20から受ける生成信号に応じた電気信号を方向整合器24へ出力する。
【0046】
方向整合器24は、送信回路22、トランスデューサ3および受信回路26とそれぞれ電気的に接続され、送信回路22から出力された電気信号をトランスデューサ3へ伝送し、かつ、トランスデューサ3から受けた電気信号を受信回路26へ出力する。すなわち、方向整合器24は、送信回路22から出力された電気信号が受信回路26へ出力されないように信号の伝送方向を制限する。
【0047】
受信回路26は、方向整合器24から受ける電気信号を受け、所定の増幅をした後に信号処理回路28へ出力する。また、受信回路26は、送信制御回路20からトリガ信号を受信すると、トランスデューサ3から出力される電気信号の受信を開始する。
【0048】
信号処理回路28は、受信回路26から電気信号を受け、アナログ・デジタル処理などを行ない、トランスデューサ3で受信される反射音波の瞬間的な振幅値を順次出力する。
(粘弾性特性の測定方法)
【0049】
以下、粘弾性特性の測定方法の一例である表面反射法について詳述する。表面反射法では、入射音波を被測定物SMPへ放射し、その入射音波が被測定物SMPと遅延部材4との境界において反射されて生じる反射音波が利用される。
図3は、表面反射法を説明するための図である。
図3(a)は、基準値を取得する場合を示す。
図3(b)は、被測定物SMPの粘弾性特性を取得する場合を示す。
【0050】
まず、音波センサ101から放射される入射音波の伝搬特性を規定するため、遅延部材4および被測定物SMPの音響インピーダンスを導入する。
【0051】
図3(a)を参照して、基準値を取得する場合には、遅延部材4と被測定物SMPとを接合させない状態、すなわち、遅延部材4が空気と接する状態を基準状態として、音波センサ101から入射音波を放射する。
【0052】
ここで、入射音波および反射音波の周波数をfとすると、周波数fに依存する遅延部材4の音響インピーダンスはZ1(f)と表すことができる。また、空気中の音響インピーダンスはZ0(f)と表すことができる。但し、音響インピーダンスZ0(f)およびZ1(f)は、いずれも複素数である。さらに、遅延部材4と空気中との境界における入射音波の反射率R01(f)は、式(1)で表すことができる。
【0053】
反射率R01(f)=(Z0(f)−Z1(f))/(Z0(f)+Z1(f))・・・(1)
【0054】
ここで、空気中の音響インピーダンスZ0(f)は、遅延部材4および被測定物SMPに比較して十分小さいため、周波数fに関わらず0<Z0(f)≪Z1(f)とみなすことができ、反射率R01(f)=−1となる。すなわち、遅延部材4と空気中との境界面において、入射音波は全反射するとみなすことができる。
【0055】
さらに、トランスデューサ3に入射する反射音波をA0(f)exp(iθ0(f))と表す。但し、iは虚数単位であり、A0(f)は各周波数における振幅値(実数値)であり、θ0(f)は各周波数における位相(0≦θ0(f)<∞)である。すると、遅延部材4と空気中との境界面において入射音波は全反射するので、トランスデューサ3から遅延部材4を介して被測定物SMPへ放射される入射音波は、式(2)で表される。
【0056】
A0(f)exp(iθ0(f))×R01(f)=−A0(f)exp(iθ0(f))・・・(2)
【0057】
すなわち、制御装置1は、式(2)で表される入射音波が被測定物SMPへ照射されるとみなし、式(2)を構成するA0(f)およびθ0(f)を基準値として格納する。
【0058】
一方、図3(b)を参照して、被測定物SMPの粘弾性特性を測定する場合には、被測定物SMPと遅延部材4とを密着させ、トランスデューサ3から図3(a)の場合と同一の入射音波を放射する。そして、遅延部材4と被測定物SMPとの境界面において反射される反射音波に応じた検出信号を、格納した前記の基準値と比較することで、被測定物SMPの粘弾性特性を測定する。
【0059】
被測定物SMPの音響インピーダンスをZ2(f)とすると、遅延部材4と被測定物SMPとの境界面における入射音波の反射率R12(f)は、式(3)で表すことができる。但し、音響インピーダンスZ2(f)は、複素数である。
【0060】
反射率R12(f)=(Z2(f)−Z1(f))/(Z2(f)+Z1(f))・・・(3)
さらに、式(3)を変形すると、式(4)が導出される。
【0061】
Z2(f)=Z1(f)×(1+R12(f))/(1−R12(f))・・・(4)
【0062】
ここで、トランスデューサ3に入射する反射音波をA(f)exp(iθ(f))と表す。但し、iは虚数単位であり、A(f)は各周波数における振幅値(実数値)であり、θは各周波数における位相(0≦θ0<∞)である。すると、式(2)で示される基準値を用いて、式(5)が成立する。
【0063】
A(f)exp(iθ(f))=−A0(f)exp(iθ0(f))×R12(f)・・・(5)
さらに、式(5)を変形して、式(6)が導出される。
【0064】
R12(f)=−A(f)/A0(f)×exp(i(θ(f)−θ0(f))・・・(6)
式(6)を式(4)に代入すると、式(7)が導出される。
【0065】
Z2(f)=Z1(f)×(1−A(f)/A0(f)×exp(i(θ(f)−θ0(f)))/(1+A(f)/A0(f)×exp(i(θ(f)−θ0(f)))・・・(7)
【0066】
ここで、被測定物SMPの貯蔵弾性率L’(f)および損失弾性率L”(f)は、被測定物SMPの音響インピーダンスZ2(f)および密度ρ2との間に式(8)で示す関係が成立する。
L’+iL”(f)=Z2(f)2/ρ2・・・(8)
【0067】
(7)式を(8)式に代入し、実数成分と虚数成分とを分離することにより、貯蔵弾性率L’(f)、損失弾性率L”(f)および損失正接tanδ(f)を求めることができる。
【0068】
このように、制御装置1は、音波センサ101から出力される検出信号と、予め定められた基準音波に基づく基準値との比較により、被測定物SMPの粘弾性特性を取得する。
(音波センサの構造)
【0069】
図4は、この発明の実施の形態1に従う音波センサ101の外観を示す概略図である。
【0070】
図4を参照して、音波センサ101は、立方形状の遅延部材4と、その上部に接合された円柱形状のトランスデューサ3と、さらにその上部に配置された送受信回路2とから構成される。
【0071】
上述したように、遅延部材4には、部材外部から入射光を取込んで遅延部材4と被測定物SMPとの接合部に向けて伝搬させるための光取込窓と、入射光が遅延部材4と被測定物SMPとの接合部で反射されて生じる観測光を部材外部へ取出すための光取出窓とが形成される。本発明の実施の形態1では、遅延部材4の側面に、光取込窓および光取出窓が形成される。
図5は、図4のX−X線断面図である。
【0072】
図5を参照して、遅延部材4、トランスデューサ3および送受信回路2は、いずれも同一の中心軸Ax上に配置される。そして、遅延部材4は、遅延部材4と被測定物SMPとの接触状態を視認可能とするために、その互いに対向する側面に光取込窓4aおよび光取出窓4bが形成される。また、遅延部材4の内部媒質4cは、入射光および観測光が伝搬可能な材料、一例としてガラスやポリカーボネイトなどによって構成される。
【0073】
より詳細には、光取込窓4aおよび光取出窓4bは、遅延部材4の表層領域について、屈折率を均一化するとともに、より光波の透過度を高めるように加工することで実現される。すなわち、屈折率を均一化することで、部材外部から入射する光波の散乱を抑制して、より入射光の取込みを容易にするとともに、透過度を高めることで、取込んだ入射光を減衰させることなく遅延部材4と被測定物SMPとの接合部に向けて伝搬させることができる。
【0074】
以下、遅延部材4と被測定物SMPとの境界面において、入射光Linが全反射して観測光Lobを生じる場合の挙動について詳述する。
【0075】
まず、光取込窓4aに対する入射光Linの入射角θinと、入射光Linが遅延部材4の内部を伝搬する方向を規定する角度θ1との関係をみる。両者の間には、スネル(Snell)の法則により、空気の屈折率Nairと遅延部材4の屈折率N1とを用いて、
Nair・sinθin=N1・sinθ1
の関係が成立する。そのため、入射光Linが遅延部材4と被測定物SMPとの境界面に入射する角度θ2は、
θ2=π/2−θ1
となる。ここで、入射光Linが全反射するためには、入射する角度θ2が臨界角θc以上となる必要がある。すなわち、
θ2=π/2−θ1≧θc
が成立する必要がある。ここで、気泡BLの屈折率は、空気の屈折率と同じくNair(Nair≦N1)であるので、臨界角θcは、
θc=sin−1(Nair/N1)
となる。さらに、入射光Linの全反射によって生成される観測光Lobは、入射光Linの入射経路と対称的な経路を伝搬するので、観測光Lobが光取出窓4bに入射する角度θ3は、
θ3=π/2−θ2
となる。そして、観測光Lobが光取出窓4bを通過する場合の射出角θoutと角度θ3との間には、
N1・sinθ3=Nair・sinθout
の関係が成立する。したがって、射出角θoutは、
θout=sin−1(sinθ3・N1/Nair)
と表される。
【0076】
すなわち、上述の一連の関係式が成立する場合には、入射光Linは、遅延部材4と介在物である気泡BLとの境界で全反射する。一方、被測定物SMPの屈折率N2が遅延部材4の屈折率N1より大きければ、臨界角は存在しない。そのため、気泡BLが存在しない場合において、遅延部材4と被測定物SMPとの境界に到達した入射光Linは、遅延部材4を通過して被測定物SMPへ入射し、その一部が被測定物SMPで反射される。したがって、観測光Lobは、気泡BLに応じて変化することになり、遅延部材4と被測定物SMPとの接触状態を視認できる。そこで、光取込窓4aおよび光取出窓4bは、上述の一連の関係式が成立するように、その位置、場所、大きさ、角度などが適切に設計される。
【0077】
なお、入射光Linおよび観測光Lobが内部媒質4cを伝搬する際に、光損失が生じないとすると、全反射して生じる観測光Lobは、光取込窓4aによって取込まれた入射光と一致する。すなわち、可視光であれば、全面「白色」の光が観測される。すなわち、遅延部材4と被測定物SMPとの境界に気泡BLが介在していると、当該気泡BLに対応する領域の映像情報は、「白色」となる。
【0078】
さらに、トランスデューサ3からは、所定の立体角で入射音波が放射される。そのため、粘弾性特性を正確に測定するためには、遅延部材4と被測定物SMPとの境界面内の入射音波が入射する領域のいずれの点に対しても、気泡BLによって全反射される入射光Linを与え、および生成された観測光Lobを取出しできるように、光取込窓4aおよび光取出窓4bを形成する必要がある。
【0079】
図6は、図5において入射音波の放射域RADの光取込窓4aに対する最近端を視認する場合を示した図である。
【0080】
図6を参照して、遅延部材4と被測定物SMPとの境界において、トランスデューサ3から放射される入射音波の放射域RADの紙面右端に介在する気泡BLを視認するためには、図5における一連の関係式が成立する必要がある。
【0081】
ここで、遅延部材4と被測定物SMPとの境界面における遅延部材4の幅長をLとし、入射音波が入射する領域の幅長をx(x≦L)とすると、入射光Linの入射位置Hin、および放射域RADの右端と光取込窓4aとの距離(L−x)/2を適切に設計する必要がある。
【0082】
図7は、図5において入射音波の放射域RADの光取込窓4aに対する最遠端を視認する場合を示した図である。
【0083】
図7を参照して、遅延部材4と被測定物SMPとの境界において、トランスデューサ3から放射される入射音波の放射域RADの紙面左端に介在する気泡BLを視認するためには、図5における一連の関係式が成立する必要がある。
【0084】
図6と同様に、遅延部材4と被測定物SMPとの境界面における遅延部材4の幅長をLとし、入射音波が入射する領域の幅長をx(x≦L)とすると、観測光Lobの射出位置Hout、および放射域RADの左端と光取出窓4bとの距離(L−x)/2を適切に設計する必要がある。
【0085】
すなわち、光取込窓4aは、遅延部材4と被測定物SMPとの境界面内の入射音波が入射する領域に含まれる各点において、気泡BLに応じた観測光Lobを生成するための入射光Linを取込み可能に構成され、光取出窓4bは、入射音波が入射する領域に含まれる各々の点において生成される観測光をいずれも取出し可能に構成される。
(設計例)
【0086】
図5を参照して、遅延部材4と被測定物SMPとの間に介在する、中心軸Ax上の気泡BLを視認する場合の設計例について例示する。
【0087】
一例として、遅延部材4の幅長L=50mmとし、空気の屈折率Nair=1.0,遅延部材4の屈折率N1=1.5,被測定物SMPの屈折率N2=2.0とする。なお、遅延部材4の材質はガラスであり、被測定物SMPの材質はポリマーである。
【0088】
たとえば入射光Linの入射角θin=60.0°とすると、光取込窓4aで屈折して生じる角度θ1=35.6°となる。そのため、入射光Linが遅延部材4と被測定物SMPとの境界面に入射する角度θ2=54.4°となる。
【0089】
ここで、臨界角θc=sin−1(Nair/N1)=41.8°であるので、角度θ2≧臨界角θcが成立する。すなわち、入射光Linは、遅延部材4と被測定物SMPとの間に介在する気泡BLによって全反射する。さらに、観測光Lobが光取出窓4bに入射する角度θ3=35.6°であるので、観測光Lobが光取出窓4bから射出される射出角θout=60.0°が得られる。
【0090】
このように、各角度が有意な値に決定できるので、光取込窓4aから取込まれる入射光Linが順次伝搬して、光取出窓4bから射出される経路が形成されることが数学的に示される。なお、入射光Linが入射する入射位置Hin=17.9mmとなるので、遅延部材4は、その高さHが17.9mmを確保できるように形成される。
【0091】
なお、上述の説明においては、光取込窓4aおよび光取出窓4bを明確に区別して記載したが、光取込窓4aおよび光取出窓4bは、その機能において互いに相補の関係にある。すなわち、たとえば、図5などにおいて、光取出窓4bから入射光を与えることも可能であり、この場合には、光取込窓4aが光取出窓4bの機能を実現する。そのため、光取込窓4aおよび光取出窓4bは、入射光の光源位置および観測光Lobの視認位置などに応じて、機能的に定まることになる。
【0092】
この発明の実施の形態1によれば、部材外部から入射光波を取込んで遅延部材と被測定物との接合部に向けて伝搬させるための光取込窓と、入射光が接合部で反射されて生じる観測光を部材外部へ取出すための光取出窓とが形成された遅延部材が用いられる。さらに、光取込窓は、遅延部材と被測定物との境界に介在物が存在する場合に限って、当該介在物によって入射光が全反射されるように入射光を接合部へ導く。これにより、介在物が存在する領域で生成された観測光は、入射光と略一致する一方、介在物が存在しない領域で生成された観測光には、被測定物の映像情報が含まれる。したがって、介在物が存在するか否かに応じて、観測光には有意な差異が生じるため、音波センサと被測定物との接触状態を視認できる。
[実施の形態2]
【0093】
この発明の実施の形態1では、立方体形状を有する遅延部材について例示したが、他の形状を採用してもよい。そこで、以下に説明するこの発明の実施の形態2においては、錐面を含む形状の遅延部材を用いる構成について説明する。
【0094】
この発明の実施の形態2に従う粘弾性測定装置は、音波センサの遅延部材の形状を除いて、上述のこの発明の実施の形態1に従う粘弾性測定装置100と同様であるので、詳細な説明は繰返さない。
【0095】
図8は、この発明の実施の形態2に従う音波センサ102の外観を示す概略図である。
【0096】
図8を参照して、音波センサ102は、いわゆる「そろばん珠」形状の遅延部材5と、その上部に接合された円柱形状のトランスデューサ3と、さらにその上部に配置された送受信回路2とから構成される。
【0097】
遅延部材5は、2つの円錐台形を共通の底面で接合したような形状に構成され、その錐面を含む表面領域に光取込窓および光取出窓が形成される。
図9は、図8のIX−IX線断面図である。
【0098】
図9を参照して、遅延部材5、トランスデューサ3および送受信回路2は、いずれも同一の中心軸Ax上に配置される。そして、遅延部材5の上側の円錐台形に相当する領域に、光取込窓5aおよび光取出窓5bが形成される。光取込窓5aは、遅延部材5と被測定物SMPの境界面に対する入射光Linの入射角θinが、遅延部材5の屈折率と気泡BLの屈折率とに応じて定まる臨界角θc以上となるように、取込んだ入射光Linを当該接合部へ導く。これにより、入射光Linは、遅延部材5と被測定物SMPと間に介在する気泡BLによっていわゆる全反射を生じる一方、気泡BLが存在しない場合には、被測定物SMPで反射される。したがって、観測光Lobは、遅延部材5と被測定物SMPとの接触状態を表す映像情報を含む。さらに、この観測光Lobは、光取出窓5bによって部材外部へ取出され、接触状態が視認される。
【0099】
なお、この発明の実施の形態2においては、入射光Linおよび観測光Lobの経路に応じて、光取込窓5aおよび光取出窓5bの機能を果たす領域がそれぞれ定まるため、光取込窓5aおよび光取出窓5bを予め明確に区別して形成する必要はない。
【0100】
光取込窓5aおよび光取出窓5bの形成方法などは、上述したこの発明の実施の形態1と同様であるので、詳細な説明は繰返さない。また、遅延部材5の内部媒質などについても、上述の遅延部材4と同様であるので、詳細な説明は繰返さない。
【0101】
以下、遅延部材5と被測定物SMPとの境界面において、入射光Linが全反射して観測光Lobを生じる場合の挙動について詳述する。
【0102】
まず、光取込窓5aに対する入射光Linの入射角θinと、入射光Linが遅延部材5の内部を伝搬する方向を規定する角度θ1との関係をみる。両者の間には、スネルの法則により、空気の屈折率Nairと遅延部材5の屈折率N1とを用いて、
Nair・sinθin=N1・sinθ1
の関係が成立する。ここで、遅延部材5と被測定物SMPとの境界面に対する光取込窓5aおよび光取出窓5bのなす角度をα1とすると、入射光Linが遅延部材5と被測定物SMPとの境界面に入射する角度θ2は、
θ2=θ1+α1
となる。ここで、入射光Linが全反射するためには、入射する角度θ2が臨界角θc以上となる必要がある。すなわち、
θ2=θ1+α1≧θc
が成立する必要がある。ここで、気泡BLの屈折率は、空気の屈折率と同じくNair(Nair≦N1)であるので、臨界角θcは、
θc=sin−1(Nair/N1)
となる。さらに、入射光Linの全反射によって生成される観測光Lobは、入射光Linの入射経路と中心軸Axに対して対称的な経路を伝搬するので、観測光Lobが光取出窓5bに入射する角度θ3は、
θ3=θ2−α1=θ1
となる。そして、観測光Lobが光取出窓5bを通過する場合の射出角θoutと角度θ3との間には、
N1・sinθ3=Nair・sinθout
の関係が成立する。したがって、射出角θoutは、
θout=sin−1(sinθ3・N1/Nair)
と表される。
【0103】
すなわち、上述の一連の関係式が成立する場合には、入射光Linが遅延部材5と被測定物SMPと間に介在する気泡BLによって全反射し、遅延部材5と被測定物SMPとの接触状態を表す映像情報を含む観測光Lobが視認できることを意味する。したがって、光取込窓5aおよび光取出窓5bは、上述の一連の関係式が成立するように、その位置、場所、大きさ、角度などが適切に設計される。
【0104】
さらに、トランスデューサ3からは、所定の立体角で入射音波が放射される。そのため、粘弾性特性を正確に測定するためには、遅延部材5と被測定物SMPとの境界面内の入射音波が入射する領域のいずれの点に対しても、気泡BLによって全反射される入射光Linを与え、および生成された観測光Lobを取出しできるように、光取込窓5aおよび光取出窓5bを形成する必要がある。
【0105】
図10は、図9において入射音波の放射域RADの光取込窓5aに対する最近端を視認する場合を示した図である。
【0106】
図10を参照して、遅延部材5と被測定物SMPとの境界において、トランスデューサ3から放射される入射音波の放射域RADの紙面右端に介在する気泡BLを視認するためには、図9における一連の関係式が成立する必要がある。そのため、光取込窓5aおよび光取出窓5bの錐面の長さおよび角度などを適切に設計する必要がある。特に、光取込窓5aに入射光Linが入射する入射位置Hin、および光取出窓5bから観測光Lobが射出する射出位置Houtを適切に設計する必要がある。
【0107】
なお、この発明の実施の形態2に従う遅延部材5は、中心軸Axに対して対称に構成されるので、入射音波の放射域RADの光取込窓5aに対する最近端を視認可能に構成すれば、必然的に、入射音波の放射域RADの光取込窓5aに対する最遠端も視認可能となる。
(設計例)
【0108】
図9を参照して、遅延部材5と被測定物SMPとの間に介在する、中心軸Ax上の気泡BLを視認する場合の設計例について例示する。
【0109】
一例として、遅延部材5の底面部の直径L=50mmとし、遅延部材5と被測定物SMPとの境界面に対する光取込窓5aおよび光取出窓5bのなす角度α1=35°とし、空気の屈折率Nair=1.0,遅延部材5の屈折率N1=1.5,被測定物SMPの屈折率N2=2.0とする。
【0110】
たとえば入射光の光取込窓5aに対する入射角θin=15.0°とすると、光取込窓5aで屈折して生じる角度θ1=9.93°となる。そのため、入射光Linが遅延部材5と被測定物SMPとの境界面に入射する角度θ2=44.93°となる。
【0111】
ここで、臨界角θc=sin−1(Nair/N1)=41.8°であるので、角度θ2≧臨界角θcが成立する。すなわち、入射光Linは、遅延部材5と被測定物SMPとの間に介在する気泡BLによって全反射する。さらに、観測光Lobが光取出窓5bに入射する角度θ3=9.93°であるので、観測光Lobが光取出窓5bから射出される射出角θout=15.0°が得られる。
【0112】
このように、各角度が有意な値に決定できるので、光取込窓5aから取込まれる入射光Linが順次伝搬して、光取出窓5bから射出される経路が形成されることが数学的に示される。
【0113】
さらに、図10を参照して、遅延部材5と被測定物SMPとの間に介在する、放射域RADの光取込窓5aに対する最近端の位置に介在する気泡BLを視認する場合の設計例について例示する。なお、遅延部材5と被測定物SMPとの境界面における放射域RADの直径x=40mmとする。
【0114】
上述したのと同様に、入射光の光取込窓5aに対する入射角θin=15.0°とすると、光取込窓5aで屈折して生じる角度θ1=9.93°となり、入射光Linが遅延部材5と被測定物SMPとの境界面に入射する角度θ2=44.93°となる。さらに、観測光Lobが光取出窓5bに入射する角度θ3=9.93°であるので、観測光Lobが光取出窓5bから射出される射出角θout=15.0°が得られる。
【0115】
ここで、入射光Linが入射する入射位置Hin=4.47mmとなる。そのため、光取込窓5aおよび光取出窓5bは、それぞれの高さが遅延部材5と被測定物SMPとの境界面から4.47mmを確保できるように形成することで、放射域RADのいずれの点に対しても、視認することができる。
【0116】
この発明の実施の形態2によれば、部材外部から入射光波を取込んで遅延部材と被測定物との接合部に向けて伝搬させるための光取込窓と、入射光が接合部で反射されて生じる観測光を部材外部へ取出すための光取出窓とが形成された遅延部材が用いられる。さらに、光取込窓は、遅延部材と被測定物との境界に介在物が存在する場合に限って、当該介在物によって入射光が全反射されるように入射光を接合部へ導く。これにより、介在物が存在する領域で生成された観測光は、入射光と略一致する一方、介在物が存在しない領域で生成された観測光には、被測定物の映像情報が含まれる。したがって、介在物が存在するか否かに応じて、観測光には有意な差異が生じるため、音波センサと被測定物との接触状態を視認できる。
【0117】
また、この発明の実施の形態2に係る光取込窓および光取出窓は、上述のこの発明の実施の形態1に比較して、遅延部材と被測定物との境界面に対する角度がより小さくなるように形成される。これにより、入射光および観測光の伝搬方向が遅延部材と被測定物との境界面に対してより垂直方向になるので、より容易な視認を実現できる。
[実施の形態3]
【0118】
この発明の実施の形態2では、2つの円錐台形が接合された形状を有する遅延部材について例示したが、この発明の実施の形態3においては、円錐台形状の遅延部材を用いる構成について説明する。
【0119】
この発明の実施の形態3に従う粘弾性測定装置は、音波センサの遅延部材の形状を除いて、上述のこの発明の実施の形態1に従う粘弾性測定装置100と同様であるので、詳細な説明は繰返さない。
【0120】
図11は、この発明の実施の形態3に従う音波センサ103の外観を示す概略図である。
【0121】
図11を参照して、音波センサ103は、円錐台形状の遅延部材6と、その上部に接合された円柱形状のトランスデューサ3と、さらにその上部に配置された送受信回路2とから構成される。
【0122】
遅延部材6は、より広い断面積をもつ面を底面側に配置した円錐台形の形状を有し、その錐面を含む表面領域に光取込窓および光取出窓が形成される。
図12は、図11のXII−XII線断面図である。
【0123】
図12を参照して、遅延部材6、トランスデューサ3および送受信回路2は、いずれも同一の中心軸Ax上に配置される。そして、遅延部材6の錐面およびトランスデューサ3との接合面を除く上面に、光取込窓6aおよび光取出窓6bが形成される。光取込窓6aは、遅延部材6と被測定物SMPの境界面に対する入射光Linの入射角θinが、遅延部材6の屈折率と気泡BLの屈折率とに応じて定まる臨界角θc以上となるように、取込んだ入射光Linを当該接合部へ導く。これにより、入射光Linは、遅延部材6と被測定物SMPと間に介在する気泡BLによっていわゆる全反射を生じる一方、気泡BLが存在しない場合には、被測定物SMPで反射される。したがって、観測光Lobは、遅延部材6と被測定物SMPとの接触状態を表す映像情報を含む。さらに、この観測光Lobは、光取出窓6bによって部材外部へ取出され、接触状態が視認される。
【0124】
なお、この発明の実施の形態3においては、入射光Linおよび観測光Lobの経路に応じて、光取込窓6aおよび光取出窓6bの機能を果たす領域がそれぞれ定まるため、光取込窓6aおよび光取出窓6bを予め明確に区別して形成する必要はない。
【0125】
光取込窓6aおよび光取出窓6bの形成方法などは、上述したこの発明の実施の形態1と同様であるので、詳細な説明は繰返さない。また、遅延部材6の内部媒質などについても、上述の遅延部材4と同様であるので、詳細な説明は繰返さない。
【0126】
この発明の実施の形態3に従う光取込窓6aおよび光取出窓6bは、上述のこの発明の実施の形態2に従う光取込窓5aおよび光取出窓5bを被測定物SMPとの境界面方向に延長したものと等価であるので、入射光Linおよび観測光Lobの挙動は、この発明の実施の形態2に従う遅延部材5における挙動と同様となる。そのため、入射光Linおよび観測光Lobの挙動についての詳細な説明は繰返さない。
【0127】
図13は、図12において入射音波の放射域RADの光取込窓6aに対する最近端を視認する場合を示した図である。
【0128】
図13を参照して、遅延部材6と被測定物SMPとの境界面において、トランスデューサ3から放射される入射音波の放射域RADの紙面右端に介在する気泡BLを視認するためには、図12における一連の関係式が成立する必要がある。そのため、光取込窓6aおよび光取出窓6bの長さおよび角度などを適切に設計する必要がある。特に、光取込窓6aに入射光Linが入射する入射位置Hin、および光取出窓6bから観測光Lobが射出する射出位置Houtを適切に設計する必要がある。
【0129】
なお、この発明の実施の形態3に従う遅延部材6は、中心軸Axに対して対称に構成されるので、入射音波の放射域RADの光取込窓6aに対する最近端を視認可能に構成すれば、必然的に、入射音波の放射域RADの光取込窓6aに対する最遠端も視認可能となる。
(設計例)
【0130】
図12を参照して、遅延部材6と被測定物SMPとの間に介在する、中心軸Ax上の気泡BLを視認する場合の設計例について例示する。
【0131】
一例として、遅延部材6の底面部の直径L=50mmとし、遅延部材6と被測定物SMPとの境界面に対する光取込窓6aおよび光取出窓6bのなす角度α1=30°とし、空気の屈折率Nair=1.0,遅延部材6の屈折率N1=1.5,被測定物SMPの屈折率N2=2.0とする。
【0132】
たとえば入射光の光取込窓6aに対する入射角θin=15.0°とすると、光取込窓6aで屈折して生じる角度θ1=9.93°となる。そのため、入射光Linが遅延部材6と被測定物SMPとの境界面に入射する角度θ2=44.93°となる。
【0133】
ここで、臨界角θc=sin−1(Nair/N1)=41.8°であるので、角度θ2≧臨界角θcが成立する。すなわち、入射光Linは、遅延部材6と被測定物SMPとの間に介在する気泡BLによって全反射する。さらに、観測光Lobが光取出窓6bに入射する角度θ3=9.93°であるので、観測光Lobが光取出窓6bから射出される射出角θout=15.0°が得られる。
【0134】
このように、各角度が有意な値に決定できるので、光取込窓6aから取込まれる入射光Linが順次伝搬して、光取出窓6bから射出される経路が形成されることが数学的に示される。
【0135】
この発明の実施の形態3によれば、部材外部から入射光波を取込んで遅延部材と被測定物との接合部に向けて伝搬させるための光取込窓と、入射光が接合部で反射されて生じる観測光を部材外部へ取出すための光取出窓とが形成された遅延部材が用いられる。さらに、光取込窓は、遅延部材と被測定物との境界に介在物が存在する場合に限って、当該介在物によって入射光が全反射されるように入射光を接合部へ導く。これにより、介在物が存在する領域で生成された観測光は、入射光と略一致する一方、介在物が存在しない領域で生成された観測光には、被測定物の映像情報が含まれる。したがって、介在物が存在するか否かに応じて、観測光には有意な差異が生じるため、音波センサと被測定物との接触状態を視認できる。
【0136】
また、この発明の実施の形態3に係る遅延部材は、より広い断面積をもつ面で被測定物と密着するように構成されるので、粘弾性特性の測定対象領域が比較的広い場合であっても、確実に音波センサと被測定物との接触状態を視認できる。
[実施の形態4]
【0137】
上述のこの発明の実施の形態1〜3においては、光取込窓によって取込まれた入射光が遅延部材と被測定物との間に介在する気泡によって全反射される構成について例示した。一方、この発明の実施の形態4においては、光取込窓によって取込まれた入射光が遅延部材と被測定物との間に介在する気泡に入射する構成について説明する。
【0138】
この発明の実施の形態4に従う粘弾性測定装置は、音波センサの遅延部材における各設計値を除いて、図1、図2および図4に示すこの発明の実施の形態1に従う粘弾性測定装置100と同様であるので、詳細な説明は繰返さない。
図14は、この発明の実施の形態4に従う音波センサの断面図である。
【0139】
図14を参照して、この発明の実施の形態4に従う音波センサは、同一の中心軸Ax上に配置される遅延部材#4、トランスデューサ3および送受信回路2からなる。そして、
遅延部材#4は、被測定物SMPを視認可能とするために、その互いに対向する側表面に光取込窓#4aおよび光取出窓#4bが形成される。
【0140】
光取込窓#4aは、部材外部から入射光Linを取込んで、取込んだ入射光Linを遅延部材#4と被測定物SMPとの接合部に向けて伝搬させ、光取出窓#4bは、入射光Linが遅延部材#4と被測定物SMPとの接合部で反射されて生じる観測光Lobを部材外部へ取出す。
【0141】
より詳細には、遅延部材#4と被測定物SMPとの境界に介在物である気泡BLが存在する場合には、入射光Linは、介在する気泡BLに入射して伝搬後に、気泡BLと被測定物SMPとの境界で反射されて、観測光Lobを生成する。一方、遅延部材#4と被測定物SMPとの境界に介在物である気泡BLが存在しない場合には、入射光Linは、遅延部材#4と接する被測定物SMPによって反射されて観測光Lobを生成する。そのため、気泡BLの有無に関わらず、観測光Lobには、被測定物SMPの表面状態についての映像情報が含まれるが、気泡BLが存在する場合には、気泡BL自体の映像情報も観測光Lobに含まれることになる。したがって、気泡BLの有無に応じて、観測光Lobには有意な差異が生じるため、遅延部材#4と被測定物SMPとの接触状態を視認できる。
また、上述の実施の形態1〜3で示したような全反射して生じる観測光を用いる場合には、被測定物SMPが白色であれば、観測光との色の差異がわずかになるので、気泡BLの存在を観測しにくいことも想定されるが、本実施の形態によれば、白色の被測定物SMPに対しても、確実に気泡BLの有無を確認できる。
【0142】
要約すると、光取込窓#4aは、入射光が遅延部材#4と気泡BLとの境界に到達すると、遅延部材#4を通過して気泡BLへ入射した後、気泡BLと被測定物SMPとの境界で反射されるように、入射光を遅延部材#4と被測定物SMPとの接合部へ導く。すなわち、光取込窓#4aは、遅延部材#4と被測定物SMPとの境界面に対する入射光の入射角が、遅延部材#4の屈折率と気泡BLの屈折率とに応じて定まる臨界角より小さくなるように、入射光Linを当該接合部へ導く。
【0143】
光取込窓#4aおよび光取出窓#4bの形成方法などは、上述したこの発明の実施の形態1と同様であるので、詳細な説明は繰返さない。また、遅延部材#4の内部媒質などについても、上述の遅延部材4と同様であるので、詳細な説明は繰返さない。
【0144】
以下、入射光Linが被測定物SMPで反射されて観測光Lobを生じる場合の挙動について詳述する。特に、中心軸Ax上であって、遅延部材#4と被測定物SMPとの境界面に介在する気泡BLを介して被測定物SMPを視認する場合について説明する。
【0145】
まず、光取込窓#4aに対する入射光Linの入射角θinと、入射光Linが遅延部材#4の内部を伝搬する方向を規定する角度θ1との関係をみる。両者の間には、スネルの法則により、空気の屈折率Nairと遅延部材#4の屈折率N1とを用いて、
Nair・sinθin=N1・sinθ1
の関係が成立する。そのため、入射光Linが遅延部材#4と被測定物SMPとの境界面に入射する角度θ2は、
θ2=π/2−θ1
となる。ここで、入射光Linが遅延部材#4を通過するためには、入射する角度θ2が臨界角θcより小さくなる必要がある。すなわち、
θ2=π/2−θ1<θc
が成立する必要がある。ここで、気泡BLの屈折率は、空気の屈折率と同じくNair(Nair≦N1)であるので、臨界角θcは、
θc=sin−1(Nair/N1)
となる。
【0146】
図15は、遅延部材#4と気泡BLとの境界における光波の挙動を説明するための図である。
【0147】
図15を参照して、被測定物SMPに入射する入射光Linの角度θ2と、入射光Linが気泡BL内に入射する角度θ3との関係をみる。両者の間には、スネルの法則により、遅延部材#4の屈折率N1と空気の屈折率Nairとを用いて、
N1・sinθ2=Nair・sinθ3
の関係が成立する。そのため、入射光Linが気泡BLと被測定物SMPとの境界面に入射する角度θ4は、
θ4=π/2−θ3
となる。ここで、屈折率Nair>屈折率N2であれば、気泡BLと被測定物SMPとの境界に到達した入射光Linは、被測定物SMPへ入射し、その一部が被測定物SMPで反射され、観測光Lobが生成される。生成される観測光Lobは、入射光Linの入射経路と対称的な経路を伝搬するので、観測光Lobが気泡BLと遅延部材#4との境界面に入射する角度θ5は、
θ5=π/2−θ4=θ3
となる。さらに、遅延部材#4の内部を伝搬する観測光Lobが遅延部材#4と被測定物SMPとの境界面に対して成す角度θ6には、
【0148】
N1・sinθ6=Nair・sinθ5=Nair・sinθ3=N1・sinθ2
の関係が成立するので、
θ6=θ2
となる。さらに、再度、図14を参照して、観測光Lobが光取出窓4bに入射する角度θ7は、
θ7=π/2−θ6
となる。そして、観測光Lobが光取出窓4bを通過する場合の射出角θoutと角度θ3との間には、
N1・sinθ7=Nair・sinθout
の関係が成立する。したがって、射出角θoutは、
θout=sin−1(sinθ7・N1/Nair)
と表される。
【0149】
すなわち、上述の一連の関係式が成立する場合には、入射光Linは、遅延部材#4と気泡BLとの境界を通過した後、気泡BLと被測定物SMPとの境界で反射されることで、被測定物SMPの状態に応じた映像情報を含む観測光Lobが生成される。したがって、光取込窓#4aおよび光取出窓#4bは、上述の一連の関係式が成立するように、その位置、場所、大きさ、角度などが適切に設計される。
【0150】
なお、遅延部材#4と被測定物SMPとの境界に気泡BLが介在しない場合には、入射光Linは、遅延部材4を通過して被測定物SMPへ入射し、その一部が被測定物SMPで反射される。
【0151】
さらに、トランスデューサ3からは、所定の立体角で入射音波が放射される。そのため、粘弾性特性を正確に測定するためには、遅延部材#4と被測定物SMPとの境界面内の入射音波が入射する領域のいずれの点に対しても、気泡BLに入射した後に反射される入射光Linおよび観測光Lobが存在するように、光取込窓#4aおよび光取出窓#4bを形成する必要がある。
【0152】
図16は、図15において入射音波の放射域RADの光取込窓#4aに対する最近端を視認する場合を示した図である。
【0153】
図16を参照して、遅延部材#4と被測定物SMPとの境界において、トランスデューサ3から放射される入射音波の放射域RADの紙面右端に介在する気泡BLを視認するためには、図15における一連の関係式が成立する必要がある。
【0154】
ここで、遅延部材#4と被測定物SMPとの境界面における遅延部材4の幅長をLとし、入射音波が入射する領域の幅長をx(x≦L)とすると、観測光Lobの入射位置Hin、および放射域RADの右端と光取込窓4aとの距離(L−x)/2を適切に設計する必要がある。
【0155】
図17は、図15において入射音波の放射域RADの光取込窓#4aに対する最遠端を視認する場合を示した図である。
【0156】
図17を参照して、遅延部材#4と被測定物SMPとの境界において、トランスデューサ3から放射される入射音波の放射域RADの紙面左端に介在する気泡BLを視認するためには、図15における一連の関係式が成立する必要がある。
【0157】
図16と同様に、遅延部材#4と被測定物SMPとの境界面における遅延部材4の幅長をLとし、入射音波が入射する領域の幅長をx(x≦L)とすると、観測光Lobの射出位置Hout、および放射域RADの紙面左端と光取出窓#4bとの距離(L−x)/2を適切に設計する必要がある。
【0158】
すなわち、光取込窓#4aは、遅延部材#4と被測定物SMPとの境界面内の入射音波が入射する領域の各点において、気泡BLに応じた観測光Lobを生成するための入射光Linを取込み可能に構成され、光取出窓#4bは、入射音波が入射する領域の各々の点において生成される観測光Lobをいずれも取出し可能に構成される。
(設計例)
【0159】
図14を参照して、遅延部材#4と被測定物SMPとの間に介在する、中心軸Ax上の気泡BLを視認する場合の設計例について例示する。
【0160】
一例として、遅延部材#4の幅長L=50mmとし、空気の屈折率Nair=1.0,遅延部材#4の屈折率N1=1.1,被測定物SMPの屈折率N2=1.65とする。
【0161】
たとえば入射光の入射角θin=30.0°とすると、光取込窓#4aで屈折して生じる角度θ1=27.0°となる。そのため、入射光Linが遅延部材#4と被測定物SMPとの境界面に入射する角度θ2=63.0°となる。
【0162】
ここで、遅延部材#4と被測定物SMPとの間に介在する気泡BLの臨界角θc=sin−1(Nair/N1)=65.4°であるので、角度θ2<臨界角θcが成立する。すなわち、遅延部材#4と気泡BLとの境界面に到達した入射光Linは、遅延部材#4を通過して気泡BLへ入射する。
【0163】
再度、図15を参照して、気泡BLに入射した入射光Linは、遅延部材#4と気泡BLとの境界面において屈折して、角度θ3の角度で気泡BL内を伝搬する。このとき、角度θ3=36.4°となるので、入射光Linの気泡BLと被測定物SMPとの境界面に入射する角度も36.4°となる。入射光Linが気泡BLと被測定物SMPとの境界面で反射されて観測光Lobを生じる。そして、観測光Lobが気泡BLと遅延部材#4との境界面に最入射する角度θ5=θ3=36.4°となり、観測光Lobが当該境界面から射出される角度θ6=θ2=63.0°となる。
【0164】
再度、図14を参照して、観測光Lobが光取出窓#4bに入射する角度θ7=27.0°であるので、観測光Lobが光取出窓#4bから射出される射出角θout=30.0°が得られる。
【0165】
このように、各角度が有意な値に決定できるので、遅延部材#4と被測定物SMPとの境界に気泡BLが介在していれば、光取込窓#4aから取込まれる入射光Linが順次伝搬して、光取出窓#4bから射出される経路が形成されることが数学的に示される。
【0166】
さらに、図16を参照して、遅延部材#4と被測定物SMPとの間に介在する、放射域RADの光取込窓#4aに対する最近端の位置に介在する気泡BLを視認する場合の設計例について例示する。なお、遅延部材#4と被測定物SMPとの境界面における放射域RADの幅長x=40mmとする。
【0167】
上述したのと同様に、入射光Linの光取込窓#4に対する入射角θin=30.0°とすると、光取込窓#4aで屈折して生じる角度θ1=27.0°となり、入射光Linが遅延部材#4と被測定物SMPとの境界面に入射する角度θ2=63.0°となる。
【0168】
ここで、入射音波の放射域RADの紙面右端に入射光Linを入射可能とするためには、入射光Linは、入射位置Hin=2.54mmにおいて光取込窓#4aによって取込まれる必要がある。すなわち、入射位置Hin=2.54mmより高い位置で入射光Linを取込むように構成することで、放射域RADのいずれの点に対しても、遅延部材#4と被測定物SMPとの接触状態を視認することができる。
【0169】
なお、上述の説明においては、光取込窓#4aおよび光取出窓#4bを明確に区別して記載したが、光取込窓#4aおよび光取出窓#4bは、その機能において互いに相補の関係にある。すなわち、光取込窓#4aおよび光取出窓#4bは、入射光の光源位置などに応じて、機能的に定まることになる。
【0170】
この発明の実施の形態4によれば、部材外部から入射光波を取込んで遅延部材と被測定物との接合部に向けて伝搬させるための光取込窓と、入射光が接合部で反射されて生じる観測光を部材外部へ取出すための光取出窓とが形成された遅延部材が用いられる。さらに、光取込窓は、遅延部材と被測定物との境界に気泡などの介在物が存在する場合には、当該気泡に入射した後に、当該気泡と被測定物との境界で反射されて観測光を生成するように、入射光を接合部へ導く。これにより、介在物が存在する領域で生成された観測光は、気泡自体の映像情報を含むようになる。したがって、介在物が存在するか否かに応じて、観測光には有意な差異が生じるため、音波センサと被測定物との接触状態を視認できる。
[実施の形態5]
【0171】
この発明の実施の形態4では、立方体形状を有する遅延部材について、光取込窓によって取込まれた入射光が遅延部材を通過して介在物に入射する構成について例示した。一方、この発明の実施の形態5においては、2つの円錐台形からなる遅延部材について、光取込窓によって取込まれた入射光が遅延部材を通過して介在物に入射する構成について説明する。
【0172】
この発明の実施の形態5に従う粘弾性測定装置は、音波センサの遅延部材における各設計値を除いて、図8に示すこの発明の実施の形態2に従う粘弾性測定装置と同様であるので、詳細な説明は繰返さない。
図18は、この発明の実施の形態5に従う音波センサの断面図である。
【0173】
図18を参照して、この発明の実施の形態5に従う音波センサは、同一の中心軸Ax上に配置される遅延部材#5、トランスデューサ3および送受信回路2からなる。そして、
遅延部材#5の上側の円錐台形に相当する領域に、光取込窓#5aおよび光取出窓#5bが形成される。より詳細には、光取込窓#5aは、入射光が遅延部材#5と気泡BLとの境界に到達すると、遅延部材#5を通過して気泡BLへ入射した後、気泡BLと被測定物SMPとの境界で反射されるように、入射光を遅延部材#5と被測定物SMPとの接合部へ導く。すなわち、光取込窓#5aは、遅延部材#5と被測定物SMPとの境界面に対する入射光の入射角が、遅延部材#5の屈折率と気泡BLの屈折率とに応じて定まる臨界角より小さくなるように、入射光Linを当該接合部へ導く。これにより、気泡BLの有無に応じて、観測光Lobには有意な差異が生じるため、遅延部材#5と被測定物SMPとの接触状態を視認できる。
【0174】
光取込窓#5aおよび光取出窓#5bの形成方法などは、上述したこの発明の実施の形態1と同様であるので、詳細な説明は繰返さない。また、遅延部材#5の内部媒質などについても、上述の遅延部材4と同様であるので、詳細な説明は繰返さない。
【0175】
以下、入射光Linが被測定物SMPで反射されて観測光Lobを生じる場合の挙動について詳述する。特に、中心軸Ax上であって、遅延部材#5と被測定物SMPとの境界面に介在する気泡BLを介して被測定物SMPを視認する場合について説明する。
【0176】
まず、光取込窓#5aに対する入射光Linの入射角θinと、入射光Linが遅延部材#5の内部を伝搬する方向を規定する角度θ1との関係をみる。両者の間には、スネルの法則により、空気の屈折率Nairと遅延部材#5の屈折率N1とを用いて、
Nair・sinθin=N1・sinθ1
の関係が成立する。ここで、遅延部材#5と被測定物SMPとの境界面に対する光取込窓#5aおよび光取出窓#5bのなす角度をα2とすると、入射光Linが遅延部材#5と被測定物SMPとの境界面に入射する角度θ2は、
θ2=θ1+α2
となる。ここで、入射光Linが遅延部材#5を通過するためには、入射する角度θ2が臨界角θcより小さくなる必要がある。すなわち、
θ2=θ1+α2<θc
が成立する必要がある。ここで、気泡BLの屈折率は、空気の屈折率と同じくNair(Nair≦N1)であるので、臨界角θcは、
θc=sin−1(Nair/N1)
となる。遅延部材#5を通過した後の入射光Linの挙動については、上述のこの発明の実施の形態4において、図15に示した内容と同様であるので、詳細な説明は繰返さない。
【0177】
そして、気泡BLと被測定物SMPとの境界面で反射されて生成される観測光Lobが遅延部材#4と被測定物SMPとの境界面に対して成す角度θ6は、角度θ2と一致する。そのため、観測光Lobが光取出窓#5bに入射する角度θ7は、
θ7=θ6−α2=θ2−α2=θ1
となる。そして、観測光Lobが光取出窓#5bを通過する場合の射出角θoutと角度θ7との間には、
N1・sinθ7=Nair・sinθout
の関係が成立する。したがって、射出角θoutは、
θout=sin−1(sinθ7・N1/Nair)
と表される。
【0178】
すなわち、上述の一連の関係式が成立する場合には、入射光Linは、遅延部材#5と気泡BLとの境界を通過した後、気泡BLと被測定物SMPとの境界で反射されることで、被測定物SMPの状態に応じた映像情報を含む観測光Lobが生成される。したがって、光取込窓#5aおよび光取出窓#5bは、上述の一連の関係式が成立するように、その位置、場所、大きさ、角度などが適切に設計される。
【0179】
さらに、トランスデューサ3からは、所定の立体角で入射音波が放射される。そのため、粘弾性特性を正確に測定するためには、遅延部材#4と被測定物SMPとの境界面内の入射音波が入射する領域のいずれの点に対しても、全反射を生じる入射光Linおよび観測光Lobが存在するように、光取込窓#5aおよび光取出窓#5bを形成する必要がある。
【0180】
図19は、図18において入射音波の放射域RADの光取込窓#5aに対する最近端を視認する場合を示した図である。
【0181】
図19を参照して、遅延部材#5と被測定物SMPとの境界において、トランスデューサ3から放射される入射音波の放射域RADの紙面右端に介在する気泡BLを視認するためには、図18における一連の関係式が成立する必要がある。そのため、光取込窓#5aおよび光取出窓#5bの長さおよび角度などを適切に設計する必要がある。特に、光取込窓#5aに入射光Linが入射する入射位置Hin、および光取出窓#5bから観測光Lobが射出する射出位置Houtを適切に設計する必要がある。
【0182】
なお、この発明の実施の形態5に従う遅延部材5#は、中心軸Axに対して対称に構成されるので、入射音波の放射域RADの光取込窓#5aに対する最近端を視認可能に構成すれば、必然的に、入射音波の放射域RADの光取込窓#5aに対する最遠端も視認可能となる。
(設計例)
【0183】
図18を参照して、遅延部材#5と被測定物SMPとの間に介在する、中心軸Ax上の気泡BLを視認する場合の設計例について例示する。
【0184】
一例として、遅延部材#5の幅長L=50mmとし、遅延部材#5と被測定物SMPとの境界面に対する光取込窓#5aおよび光取出窓#5bのなす角度α1=30°とし、空気の屈折率Nair=1.0,遅延部材#5の屈折率N1=1.1,被測定物SMPの屈折率N2=2.0とする。
【0185】
たとえば入射光の入射角θin=15.0°とすると、光取込窓#5aで屈折して生じる角度θ1=12.7°となる。そのため、入射光Linが遅延部材#5と被測定物SMPとの境界面に入射する角度θ2=42.7°となる。
【0186】
ここで、遅延部材#5と被測定物SMPとの間に介在する気泡BLの臨界角θc=sin−1(Nair/N1)=65.4°であるので、角度θ2<臨界角θcが成立する。すなわち、遅延部材#5と気泡BLとの境界面に到達した入射光Linは、遅延部材#5を通過して気泡BLへ入射する。
【0187】
再度、図15を参照して、気泡BLに入射した入射光Linは、遅延部材#5と気泡BLとの境界面において屈折して、角度θ3の角度で気泡BL内を伝搬する。このとき、角度θ3=48.2°となる。さらに、入射光Linは、気泡BLと被測定物SMPとの境界面で反射されて観測光Lobを生じる。そして、観測光Lobが気泡BLと遅延部材#5との境界面に最入射する角度θ5=θ3=48.2°となり、観測光Lobが当該境界面から射出される角度θ6=θ2=42.7°となる。
【0188】
再度、図18を参照して、観測光Lobが光取出窓#5bに入射する角度θ7=12.7°であるので、観測光Lobが光取出窓#5bから射出される射出角θout=15.0°が得られる。
【0189】
このように、各角度が有意な値に決定できるので、光取込窓#5aから取込まれる入射光Linが順次伝搬して、光取出窓#5bから射出される経路が形成されることが数学的に示される。
【0190】
さらに、図19を参照して、遅延部材#5と被測定物SMPとの間に介在する、放射域RADの光取込窓#5aに対する最近端の位置に介在する気泡BLを視認する場合の設計例について例示する。なお、遅延部材#5と被測定物SMPとの境界面における放射域RADの直径x=40mmとする。
【0191】
上述したのと同様に、入射光の光取込窓#5aに対する入射角θin=15.0°とすると、光取込窓#5aで屈折して生じる角度θ1=12.7°となり、入射光Linが遅延部材#5と被測定物SMPとの境界面に入射する角度θ2=42.7°となる。さらに、観測光Lobが光取出窓#5bに入射する角度θ3=48.2°となり、以下同様であるので、観測光Lobが光取出窓#5bから射出される射出角θout=15.0°が得られる。
【0192】
ここで、入射光Linが入射する入射位置Hin=27.1mmとなる。そのため、光取込窓#5aおよび光取出窓#5bは、それぞれの高さが遅延部材#5と被測定物SMPとの境界面から27.1mmを確保できるように形成することで、放射域RADのいずれの点に対しても、視認することができる。
【0193】
この発明の実施の形態5によれば、部材外部から入射光波を取込んで遅延部材と被測定物との接合部に向けて伝搬させるための光取込窓と、入射光が接合部で反射されて生じる観測光を部材外部へ取出すための光取出窓とが形成された遅延部材が用いられる。さらに、光取込窓は、遅延部材と被測定物との境界に気泡などの介在物が存在する場合には、当該気泡に入射した後に、当該気泡と被測定物との境界で反射されて観測光を生成するように、入射光を接合部へ導く。これにより、介在物が存在する領域で生成された観測光は、気泡自体の映像情報を含むようになる。したがって、介在物が存在するか否かに応じて、観測光には有意な差異が生じるため、音波センサと被測定物との接触状態を視認できる。
【0194】
また、この発明の実施の形態5に係る光取込窓および光取出窓は、上述のこの発明の実施の形態1に比較して、遅延部材と被測定物との境界面に対する角度がより小さくなるように形成される。これにより、入射光および観測光の伝搬方向が遅延部材と被測定物との境界面に対してより垂直方向になるので、より容易な視認を実現できる。
[実施の形態6]
【0195】
この発明の実施の形態5では、2つの円錐台形が接合された形状を有する遅延部材において、光取込窓によって取込まれた入射光が遅延部材を通過して介在物に入射する構成について例示した。一方、この発明の実施の形態6においては、円錐台形状の遅延部材を用いる構成について説明する。
【0196】
この発明の実施の形態6に従う粘弾性測定装置は、音波センサの遅延部材における各設計値を除いて、図8に示すこの発明の実施の形態3に従う粘弾性測定装置と同様であるので、詳細な説明は繰返さない。
図20は、この発明の実施の形態6に従う音波センサの断面図である。
【0197】
図20を参照して、この発明の実施の形態6に従う音波センサは、同一の中心軸Ax上に配置される遅延部材#6、トランスデューサ3および送受信回路2からなる。そして、遅延部材#6の錐面およびトランスデューサ3との接合面を除く上面に、光取込窓#6aおよび光取出窓#6bが形成される。
【0198】
より詳細には、光取込窓#6aは、入射光が遅延部材#6と気泡BLとの境界に到達すると、遅延部材#6を通過して気泡BLへ入射した後、気泡BLと被測定物SMPとの境界で反射されるように、入射光を遅延部材#6と被測定物SMPとの接合部へ導く。すなわち、光取込窓#6aは、遅延部材#6と被測定物SMPとの境界面に対する入射光の入射角が、遅延部材#6の屈折率と気泡BLの屈折率とに応じて定まる臨界角より小さくなるように、入射光Linを当該接合部へ導く。これにより、気泡BLの有無に応じて、観測光Lobには有意な差異が生じるため、遅延部材#6と被測定物SMPとの接触状態を視認できる。
【0199】
なお、この発明の実施の形態6においては、入射光Linおよび観測光Lobの経路に応じて、光取込窓#6aおよび光取出窓#6bの機能を果たす領域がそれぞれ定まるため、光取込窓#6aおよび光取出窓#6bを予め明確に区別して形成する必要はない。
【0200】
光取込窓#6aおよび光取出窓#6bの形成方法などは、上述したこの発明の実施の形態1と同様であるので、詳細な説明は繰返さない。また、遅延部材#6の内部媒質などについても、上述の遅延部材4と同様であるので、詳細な説明は繰返さない。
【0201】
この発明の実施の形態6に従う光取込窓#6aおよび光取出窓#6bは、上述のこの発明の実施の形態5に従う光取込窓#5aおよび光取出窓#5bを被測定物SMPとの境界面方向に延長したものと等価であるので、入射光Linおよび観測光Lobの挙動は、この発明の実施の形態5に従う遅延部材#5における挙動と同様となる。そのため、入射光Linおよび観測光Lobの挙動についての詳細な説明は繰返さない。
【0202】
図21は、図20において入射音波の放射域RADの光取込窓#6aに対する最近端を視認する場合を示した図である。
【0203】
図21を参照して、遅延部材#6と被測定物SMPとの境界面において、トランスデューサ3から放射される入射音波の放射域RADの紙面右端に介在する気泡BLを視認するためには、図20における入射光Linおよび観測光Lobの各角度の関係が成立する必要がある。そのため、光取込窓#6aおよび光取出窓#6bの長さおよび角度などを適切に設計する必要がある。特に、光取込窓#6aに入射光Linが入射する入射位置Hin、および光取出窓#6bから観測光Lobが射出する射出位置Houtを適切に設計する必要がある。
【0204】
なお、この発明の実施の形態6に従う遅延部材#6は、中心軸Axを対称にして配置されるので、入射音波の放射域RADの光取込窓#6aに対する最近端を視認可能に構成することで、入射音波の放射域RADの光取込窓#6aに対する最遠端を視認可能となる。
(設計例)
【0205】
図20を参照して、遅延部材#6と被測定物SMPとの間に介在する、中心軸Ax上の気泡BLを視認する場合の設計例について例示する。
【0206】
一例として、遅延部材#6の幅長L=50mmとし、遅延部材#6と被測定物SMPとの境界面に対する光取込窓#6aおよび光取出窓#6bのなす角度α1=30°とし、空気の屈折率Nair=1.0,遅延部材#6の屈折率N1=1.1,被測定物SMPの屈折率N2=2.0とする。
【0207】
たとえば入射光の入射角θin=15.0°とすると、光取込窓#6aで屈折して生じる角度θ1=12.7°となる。そのため、入射光Linが遅延部材#6と被測定物SMPとの境界面に入射する角度θ2=42.7°となる。
【0208】
ここで、遅延部材#6と被測定物SMPとの間に介在する気泡BLの臨界角θc=sin−1(Nair/N1)=65.4°であるので、角度θ2<臨界角θcが成立する。すなわち、遅延部材#6と気泡BLとの境界面に到達した入射光Linは、遅延部材#6を通過して気泡BLへ入射する。
【0209】
再度、図15を参照して、気泡BLに入射した入射光Linは、遅延部材#6と気泡BLとの境界面において屈折して、角度θ3の角度で気泡BL内を伝搬する。このとき、角度θ3=48.2°となる。さらに、入射光Linは、気泡BLと被測定物SMPとの境界面で反射されて観測光Lobを生じる。そして、観測光Lobが気泡BLと遅延部材#6との境界面に最入射する角度θ5=θ3=48.2°となり、観測光Lobが当該境界面から射出される角度θ6=θ2=42.7°となる。
【0210】
再度、図20を参照して、観測光Lobが光取出窓#6bに入射する角度θ7=12.7°であるので、観測光Lobが光取出窓#6bから射出される射出角θout=15.0°が得られる。
【0211】
このように、各角度が有意な値に決定できるので、光取込窓#6aから取込まれる入射光Linが順次伝搬して、光取出窓#6bから射出される経路が形成されることが数学的に示される。
【0212】
この発明の実施の形態6によれば、部材外部から入射光波を取込んで遅延部材と被測定物との接合部に向けて伝搬させるための光取込窓と、入射光が接合部で反射されて生じる観測光を部材外部へ取出すための光取出窓とが形成された遅延部材が用いられる。さらに、光取込窓は、遅延部材と被測定物との境界に気泡などの介在物が存在する場合には、当該気泡に入射した後に、当該気泡と被測定物との境界で反射されて観測光を生成するように、入射光を接合部へ導く。これにより、介在物が存在する領域で生成された観測光は、気泡自体の映像情報を含むようになる。したがって、介在物が存在するか否かに応じて、観測光には有意な差異が生じるため、音波センサと被測定物との接触状態を視認できる。
【0213】
また、この発明の実施の形態6に係る遅延部材は、より広い断面積をもつ面で被測定物と密着するように構成されるので、粘弾性特性の測定対象領域が比較的広い場合であっても、確実に音波センサと被測定物との接触状態を視認できる。
[実施の形態7]
【0214】
この発明の実施の形態3および6では、台形の縦断面を有する円錐台形からなる遅延部材を用いる構成について例示したが、同様に台形の縦断面を有する四角錐台形からなる遅延部材を用いる構成について説明する。
【0215】
この発明の実施の形態7に従う粘弾性測定装置は、音波センサの遅延部材の形状を除いて、上述のこの発明の実施の形態1に従う粘弾性測定装置100と同様であるので、詳細な説明は繰返さない。
図22は、この発明の実施の形態7に従う音波センサ104の外観図である。
【0216】
図22を参照して、音波センサ104は、四角錐台形の遅延部材7と、その上部に接合された円柱形状のトランスデューサ3と、さらにその上部に配置された送受信回路2とから構成される。
【0217】
遅延部材7は、より広い面積をもつ横断面を底面側に配置した四角錐台形により構成され、その錐面およびトランスデューサ3との接合面を除く上面に、光取込窓7aおよび光取出窓7bが形成される。光取込窓7aおよび光取出窓7bの形成方法などは、上述したこの発明の実施の形態1と同様であるので、詳細な説明は繰返さない。また、遅延部材7の内部媒質などについても、上述の遅延部材4と同様であるので、詳細な説明は繰返さない。
【0218】
入射光および観測光の挙動などについては、上述のこの発明の実施の形態3または6と同様であるので、詳細な説明は繰返さない。
【0219】
さらに、四角錐台形からなる遅延部材に代えて、同様に台形の縦断面を有するn角錐台形(但し、nは6以上の偶数)の遅延部材を用いてもよい。
【0220】
この発明の実施の形態7によれば、上述のこの発明の実施の形態3または6における効果に加えて、錐面に光取込窓および光取出窓を形成できるので、光取込窓および光取出窓が平面状に形成できる。これにより、光取込窓および光取出窓における入射光および観測光に生じる歪みを抑制できるので、より鮮明に音波センサと被測定物との接触状態を視認できる。
[実施の形態8]
【0221】
この発明の実施の形態1〜6では、垂直軸を中心として対称な形状を有する遅延部材を用いる構成について例示したが、この発明の実施の形態8においては、水平軸を中心として対称な形状を有する遅延部材を用いる構成について説明する。
【0222】
この発明の実施の形態8に従う粘弾性測定装置は、音波センサの形状を除いて、上述のこの発明の実施の形態1に従う粘弾性測定装置100と同様であるので、詳細な説明は繰返さない。
図23は、この発明の実施の形態8に従う音波センサ105の外観図である。
【0223】
図23を参照して、音波センサ105は、いわゆる「かまぼこ」形状の遅延部材8と、その上部に接合された送受信回路#2およびトランスデューサ#3を含む部材とにより構成される。
【0224】
遅延部材8は、その垂直断面が半楕円形である略楕円柱状に構成され、その上部表面に光取込窓8aおよび光取出窓8bが形成される。なお、遅延部材8の底面は、被測定物SMPと接合可能なように平面状に形成される。
【0225】
送受信回路#2およびトランスデューサ#3は、遅延部材8の表面曲率と一致するような外形にパッケージされて、遅延部材8と接合される。
図24は、図23のXXIV−XXIV線断面図である。
【0226】
図24を参照して、この発明の実施の形態8に従う遅延部材8は、上部表面の一方側から入射光Linを取込むとともに、生成された観測光Lobを上部表面の他方側から取出して、部材外部へ出力する。
【0227】
上述のこの発明の実施の形態1〜3において説明したように、遅延部材8と被測定物SMPとの境界面で入射光Linが反射されて生成された観測光Lob、および、上述のこの発明の実施の形態4〜6において説明したように、入射光Linが遅延部材8を通過した後に被測定物SMPで反射されて生成された観測光Lobのいずれについても視認することができる。
【0228】
さらには、視認対象とする観測光Lobに応じて、遅延部材8の垂直断面の曲率などを適切に設計することが望ましい。
【0229】
なお、入射光Linおよび観測光Lobの挙動などについては、上述のこの発明の実施の形態1〜6のいずれかと同様であるので、詳細な説明は繰返さない。
【0230】
この発明の実施の形態8によれば、上述のこの発明の実施の形態1〜6のいずれかにおける効果に加えて、上部表面のほぼ全面に光取込窓および光取出窓を形成できるので、光取込窓および光取出窓の面積をより大きくすることができる。これにより、入射光の取込量を増大させて遅延部材と被測定物との境界に入射する光量を確保できるとともに、音波センサと被測定物との接触状態をより詳細に視認できる。
[実施の形態9]
【0231】
上述したように、この発明に係る音波センサは、音波センサと被測定物との接触状態を視認可能とすることを目的とするが、音波センサと被測定物とのすべての接触面に対して、入射音波が放射されるとは限らない。すなわち、音波センサと被測定物との接触状態を視認する対象領域を入射音波の放射域にすれば十分である。
【0232】
一方で、トランスデューサから放射される入射音波は視認することができない。そのため、入射音波の放射域を視認できれば、より作業効率を向上させることが可能となる。
図25は、この発明の実施の形態9に従う音波センサ101Aの断面図である。
【0233】
図25を参照して、この発明の実施の形態9に従う音波センサ101Aは、図5に示すこの発明の実施の形態1に従う音波センサ101において、トランスデューサ3を同心円状のトランスデューサ3Aに代えるとともに、トランスデューサ3Aの中心部に表示光発光部9を設けたものである。
【0234】
表示光発光部9は、一例として、レーザダイオードなどで構成され、トランスデューサ3Aから放射される入射音波の放射域RADに対応するように、遅延部材4の上部から底面に向けて、表示光MLを放射する。すなわち、表示光発光部9は、遅延部材4を通過した入射音波が被測定物SMPに入射する領域を表示するために、表示光MLを放射する。すると、遅延部材4と被測定物SMPとの境界面上では、放射された表示光MLの照射によって、周囲より輝度の高い領域が示される。
【0235】
その他の構成については、この発明の実施の形態1に従う音波センサ101と同様であるので、詳細な説明は繰返さない。
【0236】
なお、図25に示すように、表示光発光部9を同心円状のトランスデューサ3Aの中心部に配置する構成に代えて、トランスデューサの外周に発光源を配置するような構成を採用してもよい。
【0237】
また、図25ではこの発明の実施の形態1に従う音波センサに表示光発光部9を設けた構成を示したが、上述のいずれの音波センサに対しても、同様に表示光発光部9を設けることができる。
【0238】
この発明の実施の形態9によれば、音波センサと被測定物との境界のうち、接触状態を視認すべき領域を予め視認できるので、接触状態の視認作業をより効率的に行なうことができる。
[実施の形態10]
【0239】
上述のこの発明の実施の形態1〜9では、光取込窓の周囲に存在するさまざまな方向の光のうち、視認に適した方向の光が取込まれる構成について説明したが、光取込窓に対して、積極的に入射光を与えるように構成してもよい。
【0240】
図26は、この発明の実施の形態10に従う音波センサ102Aの概略構成図である。
【0241】
図26を参照して、この発明の実施の形態10に従う音波センサ102Aは、一例として、図9に示すこの発明の実施の形態2に従う音波センサ102に対して、光源40と、固定腕42と、可動腕44と、駆動装置46と、受光部48と、解析装置50とをさらに設けたものである。
【0242】
光源40は、一例として、可視光ランプや赤外線ランプなどで構成され、受光部48における受光感度の高い波長領域を含む入射光を生成する。すなわち、光源40は、光取込窓5aに近接して配置され、入射光を生成して、光取込窓5aへ与える。
【0243】
固定腕42は、その一端がリンク機構を介して可動腕44と連結されるとともに、その他端が図示しない架台に連結される。そして、固定腕42は、可動腕44に所定の変位を与えるための基準として機能する。
【0244】
可動腕44は、その一端が光源40と連結されるとともに、その他端がリンク機構を介して固定腕42と連結される。
【0245】
駆動装置46は、一例としてモータなどのドライブ機構からなり、固定腕42に対する可動腕44の角度を可変させる。すなわち、駆動装置46は、光源40で生成される入射光が光取込窓5aに入射する入射角θinを可変に構成される。この構成により、遅延部材5と被測定物SMPとの境界面において視認すべき領域に応じた入射光を、光取込窓5aに対して与えることができる。
【0246】
これらの構成により、光取込窓5aの周囲が暗い場合であっても、音波センサと被測定物との接触状態をより確実に視認できる。
【0247】
さらに、受光部48は、一例としてCCDといった撮像素子などで構成され、光取出窓5bによって取出される観測光を受光して、その受光結果を解析装置50へ出力する。すなわち、受光部48は、光取出窓5bに近接して配置され、光取出窓5bから取出された観測光を受光し、受光した観測光に含まれる映像情報を解析装置50へ出力する。
【0248】
解析装置50は、受光部48から出力される映像情報を取得し、音波センサと被測定物との接触状態の良否を判断して、その判断結果を外部へ出力する。解析装置50は、一例として、画像処理装置であり、受光部48を介して取得される映像情報における濃淡や輝度に基づいて、接触状態の良否(たとえば、気泡BLの有無)を判断する。なお、画像処理装置の処理内容については、さまざまな周知の技術を用いることができる。
【0249】
これらの構成により、可視光領域ではなく、赤外線領域の入射光を用いることもできるので、周囲からの光波の影響を抑制して、より安定した視認が可能となる。
【0250】
なお、光源40と、受光部48および解析装置50とは、必ずしも同時に設ける必要はなく、いずれか一方だけを配置するようにしてもよい。
【0251】
この発明の実施の形態10によれば、光取込窓の周囲が暗い場合であっても、入射光の光量を確保できるので、音波センサと被測定物との接触状態をより確実に視認できる。
【0252】
また、この発明の実施の形態10によれば、画像処理装置によって音波センサと被測定物との接触状態の良否判断を所定の規則に従って行なうことができるので、人間による視認(目視)の場合のように主観的な判断に影響されることなく、判断基準を標準化することができる。これにより、接触状態を所定のレベルに維持して、測定精度のバラツキなどを抑制できる。
【0253】
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した説明ではなく、特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【図面の簡単な説明】
【0254】
【図1】この発明の実施の形態1に従う音波センサを備える粘弾性測定装置の概略構成図である。
【図2】粘弾性測定装置の構成をより詳細に示す図である。
【図3】表面反射法を説明するための図である。
【図4】この発明の実施の形態1に従う音波センサの外観を示す概略図である。
【図5】図4のX−X線断面図である。
【図6】図5において入射音波の放射域の光取込窓に対する最近端を視認する場合を示した図である。
【図7】図5において入射音波の放射域の光取込窓に対する最遠端を視認する場合を示した図である。
【図8】この発明の実施の形態2に従う音波センサの外観を示す概略図である。
【図9】図8のIX−IX線断面図である。
【図10】図9において入射音波の放射域の光取込窓に対する最近端を視認する場合を示した図である。
【図11】この発明の実施の形態3に従う音波センサの外観を示す概略図である。
【図12】図11のXII−XII線断面図である。
【図13】図12において入射音波の放射域の光取込窓に対する最近端を視認する場合を示した図である。
【図14】この発明の実施の形態4に従う音波センサの断面図である。
【図15】遅延部材と気泡との境界における光波の挙動を説明するための図である。
【図16】図15において入射音波の放射域の光取込窓に対する最近端を視認する場合を示した図である。
【図17】図15において入射音波の放射域の光取込窓に対する最遠端を視認する場合を示した図である。
【図18】この発明の実施の形態5に従う音波センサの断面図である。
【図19】図18において入射音波の放射域の光取込窓に対する最近端を視認する場合を示した図である。
【図20】この発明の実施の形態6に従う音波センサの断面図である。
【図21】図20において入射音波の放射域の光取込窓に対する最近端を視認する場合を示した図である。
【図22】この発明の実施の形態7に従う音波センサの外観図である。
【図23】この発明の実施の形態8に従う音波センサの外観図である。
【図24】図23のXXIV−XXIV線断面図である。
【図25】この発明の実施の形態9に従う音波センサの断面図である。
【図26】この発明の実施の形態10に従う音波センサの概略構成図である。
【符号の説明】
【0255】
1 制御装置、2,#2 送受信回路、3,3A,#3 トランスデューサ、4,5,6,7,8,#4,#5,#6 遅延部材、4a,5a,6a,7a,8a,#4a,#5a,#6a 光取込窓、4b,5b,6b,7b,8b,#4b,#5b,#6b 光取出窓、4c 内部媒質、9 表示光発光部、10 演算部、12 時間データメモリ部、14 記憶部、16 表示出力部、18 入力部、20 送信制御回路、22 送信回路、24 方向整合器、26 受信回路、28 信号処理回路、40 光源、42 固定腕、44 可動腕、46 駆動装置、48 受光部、50 解析装置、100 粘弾性測定装置、101,101A,102,102A,103,104,105 音波センサ、Ax 中心軸、BL 気泡、Hin 入射位置、Hout 射出位置、L’ 貯蔵弾性率、L” 損失弾性率、Lin 入射光、Lob 観測光、ML 表示光、N1,N2,Nair 屈折率、RAD 放射域、SMP 被測定物、tanδ 損失正接、θc 臨界角、θin 入射角、θout 射出角。
【技術分野】
【0001】
この発明は被測定物に音波を放射するとともに、被測定物で反射される音波に応じた検出信号を外部出力する音波センサに関し、特に、音波センサと被測定物との接触状態を視認可能とする技術に関するものである。
【背景技術】
【0002】
物質の物性を評価する指標の1つに粘弾性特性がある。粘弾性とは、与えられる応力に比例してひずみを生じる弾性、および与える応力を受けて粘性流動を生じる粘性を併せ持つ物性である。
【0003】
近年、音波(特に、超音波)を用いて、被測定物の粘弾性特性を測定する方法が提案されている。このような、音波を用いた粘弾性特性の測定方法では、被測定物に音波を放射するとともに、当該放射された音波が被測定物で反射されて生じる音波を、基準状態において反射されて生じる音波と比較することで被測定物の粘弾性特性が取得される。
【0004】
このような粘弾性特性の測定方法には、遅延部材を備える音波センサが使用される。遅延部材は、反射されて生じる音波を正確に検出するために、被測定物へ放射される音波と、被測定物で反射されて生じる音波とを時間的に分離させる部材である。すなわち、トランスデューサなどから放射された音波は、遅延部材を伝搬して被測定物へ入射するとともに、被測定物で反射された音波は、再度遅延部材を伝搬してトランスデューサへ入射する。
【0005】
ところで、音波センサと被測定物との間に気泡などが介在すると、誤差の発生原因となるので、両者の間は可能な限り密着させることが望ましい。一例として、特開平11−030512号公報(特許文献1)には、被測定物表面に遅延材表面を追従、密着させることを可能にした厚さ計プローブが開示されている。この厚さ計プローブでは、センサユニットおよび受け金具が軸上の点で支持金具の端部と接触するように構成して、保持する外筒の傾きに影響されることなく遅延材表面が被測定物表面に追従、密着される。
【特許文献1】特開平11−030512号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
粘弾性特性の測定対象となる被測定物は、一例としてパン生地などであり、その表面は固形化されたものではなく、比較的柔らかい場合が多い。そのため、特開平11−030512号公報(特許文献1)に開示される厚さ計プローブと同様の構成を有する音波センサを用いたとしても、高い精度で測定を行なうことができなかった。むしろ、被測定物に応じて、音波センサと被測定物との接触の程度を確認しながら、測定を行なうことが重要である。
【0007】
しかしながら、特開平11−030512号公報(特許文献1)に開示される厚さ計プローブを含む、従来の音波センサでは、音波センサと被測定物との接触状態を視認可能な構成とはなっていなかった。
【0008】
そこで、この発明は、かかる問題を解決するためになされたものであり、その目的は、被測定物との間の接触状態を視認可能な音波センサおよびそれを備えた粘弾性測定装置を提供することである。
【課題を解決するための手段】
【0009】
この発明によれば、被測定物に対して第1の音波を放射するとともに、被測定物で反射されて生じる第2の音波に応じた検出信号を外部出力するように構成された音波センサである。そして、音波センサは、電気信号の入力に応答して第1の音波を発生するとともに、第2の音波の入力に応答して電気信号を発生する電気音波変換部と、電気音波変換部と被測定物との間に介挿され、第1および第2の音波に対して伝搬遅延を生じさせるための遅延部材とを備える。さらに、遅延部材は、光波を伝搬可能な媒質で構成されるとともに、部材外部からの第1の光波を取込んで、当該第1の光波を遅延部材と被測定物との接合部に向けて伝搬させるための光取込窓と、第1の光波が接合部で反射されて生じる第2の光波を部材外部へ取出すための光取出窓とが形成され、光取込窓は、遅延部材と被測定物との間に介在し得る介在物に応じて、生成される第2の光波が変化するように、第1の光波を接合部へ導く。
【0010】
この発明によれば、遅延部材には、部材外部からの第1の光波を取込んで遅延部材と被測定物との接合部に向けて伝搬させるための光取込窓と、第1の光波が接合部で反射されて生じる第2の光波を部材外部へ取出すための光取出窓とが形成される。さらに、光取込窓は、遅延部材と被測定物との間に介在し得る介在物に応じて、生成される第2の光波が変化するように、第1の光波を接合部へ導く。これにより、遅延部材と被測定物との間に介在する気泡などの介在物の有無に応じた映像情報を容易に得ることができるので、音波センサと被測定物との接触状態の視認が可能となる。
【0011】
好ましくは、光取込窓は、第1の光波が遅延部材と介在物との境界に到達すると、遅延部材の内部に維持されたまま反射される一方、第1の光波が遅延部材と被測定物との境界に到達すると、遅延部材を通過して被測定物へ入射するように、第1の光波を接合部へ導く。
【0012】
また好ましくは、光取込窓は、遅延部材と被測定物との境界面に対する第1の光波の入射角が、遅延部材の屈折率と介在物の屈折率とに応じて定まる臨界角以上となるように、第1の光波を接合部へ導く。
【0013】
また好ましくは、光取込窓は、第1の光波が遅延部材と介在物との境界に到達すると、遅延部材を通過して介在物へ入射した後、介在物と被測定物との境界で反射されるように、第1の光波を接合部へ導く。
【0014】
また好ましくは、光取込窓は、遅延部材と被測定物との境界面に対する第1の光波の入射角が、遅延部材の屈折率と介在物の屈折率とに応じて定まる臨界角より小さくなるように、第1の光波を接合部へ導く。
【0015】
さらに好ましくは、光取込窓は、遅延部材と被測定物との境界面内の第1の音波が入射する領域に含まれる各点において、介在物に応じた第2の光波を生成するための第1の光波を取込み可能に構成され、光取出窓は、第1の音波が入射する領域に含まれる各々の点において生成される第2の光波をいずれも取出し可能に構成される。
また好ましくは、遅延部材の屈折率は、被測定物の屈折率に比較して小さい。
【0016】
また好ましくは、音波センサは、遅延部材を通過した第1の音波が被測定物に入射する領域を表示するための表示光を発生する表示光発生部をさらに備える。
【0017】
また好ましくは、音波センサは、光取込窓に近接して配置され、第1の光波を生成して光取込窓へ与えるための光源部をさらに備える。
【0018】
また好ましくは、音波センサは、光取出窓に近接して配置され、光取出窓から取出された第2の光波を受光して、受光した第2の光波に含まれる映像情報を出力するためのカメラ部と、カメラ部からの映像情報に基づいて、接合部における遅延部材および被測定物の少なくとも一方の状態を判断するための解析装置とをさらに備える。
【0019】
またこの発明によれば、上述のいずれかの音波センサと、音波センサから出力される検出信号と、予め定められた基準音波に基づく基準値との比較により、被測定物の粘弾性特性を取得するための制御装置とを備える粘弾性測定装置である。
【発明の効果】
【0020】
この発明によれば、被測定物との間の接触状態を視認可能な音波センサおよびそれを備えた粘弾性測定装置を実現できる。
【発明を実施するための最良の形態】
【0021】
この発明の実施の形態について、図面を参照しながら詳細に説明する。なお、図中の同一または相当部分については、同一符号を付してその説明は繰返さない。
[実施の形態1]
【0022】
図1は、この発明の実施の形態1に従う音波センサ101を備える粘弾性測定装置100の概略構成図である。
【0023】
図1を参照して、粘弾性測定装置100は、被測定物SMPとの接触状態を保ちながら、その粘弾性特性を測定するための装置である。なお、本明細書において、粘弾性特性とは、貯蔵弾性率、損失弾性率および損失正接のうち少なくとも1つ以上で規定される物質の特性の総称を意味する。そして、粘弾性測定装置100は、制御装置1と、音波センサ101とを備える。
【0024】
音波センサ101は、被測定物SMPと接合するように配置され、被測定物SMPに対して音波を放射する(以下、音波センサ101から被測定物SMPへ放射される音波を「入射音波」とも称す。)とともに、被測定物SMPで反射されて生じる音波(以下、入射音波が被測定物SMPで反射されて生じる音波を「反射音波」とも称す。)に応じた検出信号を外部出力するように構成される。なお、入射音波および反射音波としては、可聴帯域以上の周波数を有する超音波が好ましい。
【0025】
制御装置1は、音波センサ101から出力される検出信号と、予め定められた基準音波に基づく基準値との比較により、被測定物SMPの粘弾性特性を取得する。
【0026】
音波センサ101は、送受信回路2と、トランスデューサ3と、遅延部材4とを含む。
【0027】
送受信回路2は、制御装置1から与えられる指令に応答して、トランスデューサ3による入射音波の照射を制御するとともに、トランスデューサ3により受信される反射音波に応じた電気信号を制御装置1へ出力する。
【0028】
トランスデューサ3は、送受信回路2からの電気信号の入力に応答して入射音波を発生するとともに、反射音波の入力に応答して電気信号を発生する電気音波変換部であり、一例として、チタン酸ジルコン酸鉛などの圧電素子などからなる。
【0029】
遅延部材4は、バッファ(Buffer)部材などとも称され、トランスデューサ3と被測定物SMPとの間に介挿され、入射音波および反射音波に対して伝搬遅延を生じさせる。さらに、この発明の実施の形態1に従う遅延部材4は、可視光などの観測用の光波を伝搬可能な媒質で構成される。
【0030】
遅延部材4と被測定物SMPとの間には気泡などの介在物が存在し得る。このような介在物の存在によって、遅延部材4と被測定物SMPとの密着度は低下する。そこで、この発明に係る遅延部材4は、遅延部材4と被測定物SMPとの接触状態、すなわち介在物の有無を視認可能に構成される。
【0031】
具体的には、遅延部材4には、部材外部からの光波を取込んで、当該取込んだ光波を遅延部材4と被測定物SMPとの接合部に向けて伝搬させるための光取込窓と、伝搬した光波が遅延部材4と被測定物SMPとの接合部で反射されて生じる光波を部材外部へ取出すための光取出窓とが形成される。ここで、「接合部」とは、遅延部材4と被測定物SMPとの境界面、および当該境界面に近接する遅延部材4および被測定物SMP、ならびに遅延部材4と被測定物SMPとの間に存在し得る介在物を総称的に示す用語である。
【0032】
なお、以下の説明においては、光取込窓によって部材外部から取込まれる光波を「入射光」とも称し、光取出窓によって部材外部へ取出される光波を「観測光」とも称す。
【0033】
そして、光取込窓は、遅延部材4と被測定物SMPとの境界に介在物が存在する場合には、当該介在物によって入射光が全反射されるとともに、介在物が存在しない場合には、被測定物SMPによって入射光が反射されるように、取込んだ光を接合部へ導く。このような入射光が取込まれることによって、介在物が存在する領域で生成された観測光は、入射光と略一致する一方、介在物が存在しない領域で生成された観測光には、被測定物SMPの映像情報が含まれる。したがって、介在物が存在するか否かに応じて、観測光には有意な差異が生じるため、遅延部材4と被測定物SMPとの接触状態を視認できる。
【0034】
要約すると、光取込窓は、入射光が遅延部材4と介在物との境界に到達すると、遅延部材4の内部に維持されたまま反射されるとともに、入射光が遅延部材4と被測定物SMPとの境界に到達すると、遅延部材4を通過して被測定物SMPへ入射するように、入射光を遅延部材4と被測定物SMPとの接合部へ導く。すなわち、光取込窓は、遅延部材4と被測定物SMPとの境界面に対する入射光の入射角が、遅延部材4の屈折率と介在物の屈折率とに応じて定まる臨界角以上となるように、入射光を当該接合部へ導く。さらに、生成された観測光は、光取出窓によって部材外部へ取出され、接触状態が視認される。
【0035】
なお、視認を行なう主体に応じて、入射光として用いる光波の波長帯域を適切に選択すればよい。すなわち、人間による視認(目視)が行なわれる場合には、入射光として可視光線を用い、CCD(Charged Coupled Device)などで構成された受光部などによって目視が行なわれる場合には、当該受光部の受光感度に適した波長帯域を含む光波を入射光として用いることが望ましい。
【0036】
また、粘弾性測定の対象となる被測定物SMPとしては、遅延部材4と接合可能な大きさを有するものであればいずれでもよい。
図2は、粘弾性測定装置100の構成をより詳細に示す図である。
【0037】
図2を参照して、制御装置1は、たとえば、パーソナルコンピュータなどで構成され、入力部18と、時間データメモリ部12と、記憶部14と、演算部10と、表示出力部16とからなる。
【0038】
入力部18は、ユーザなどからの外部指令を受け、その外部指令を演算部10へ出力する。一例として、入力部18は、操作ボタン、キーボード、マウス、タッチパネルなどからなる。
【0039】
時間データメモリ部12は、送受信回路2を介して出力されるトランスデューサ3からの検出信号の時間波形データを所定の周期で格納する。なお、時間データメモリ部12は、演算部10からの要求に応じて、時間波形データを格納する周期を変更可能に構成される。
【0040】
記憶部14は、演算部10を介して取得された基準値を格納し、演算部10からの要求に応じて、その格納する基準値を読出す。そして、記憶部14は、演算部10で測定される粘弾性特性を順次格納する。
【0041】
演算部10は、入力部18を介して、外部からプロセス開始指令を受けると、送受信回路2へ放射指令を与え、トランスデューサ3から入射音波を放射させる。そして、演算部10は、時間データメモリ部12に格納される反射音波の時間波形データを読出し、一例として、高速フーリエ変換処理(Fast Fourier Transform;以下、FFT処理とも称す)のような周波数解析処理を行ない、各周波数における振幅値および位相を取得する。続いて、演算部10は、記憶部14に予め格納されている基準値を読出し、その基準値と取得した検出信号の各周波数における振幅値および位相とを比較することで、被測定物SMPの粘弾性特性を測定する。さらに、演算部10は、その測定した被測定物SMPの粘弾性特性を表示出力部16または/および記憶部14へ出力する。したがって、トランスデューサ3から1回の入射音波の放射により、演算部10は、その放射音波に含まれる周波数帯域の各周波数における被測定物SMPの粘弾性特性を測定できる。
【0042】
表示出力部16は、演算部10によって測定される被測定物SMPの粘弾性特性や、演算部10から出力される各指令情報などを表示または/およびそのデータを外部へ出力する。表示出力部16が表示を行なう場合には、一例として、液晶ディスプレイやプラズマディスプレイなどの表示装置からなる。また、表示出力部16がデータを外部へ出力を行なう場合には、一例として、USB(Universal Serial Bus)、RS−232C(Recommended Standard 232 version C)、IEEE(Institute of Electrical and Electronic Engineers)1394、SCSI(Small Computer System Interface)、イーサネット(登録商標)、IEEE1284(パラレルポート)などの規格に対応するインターフェイスなどからなる。
【0043】
一方、送受信回路2は、送信制御回路20と、送信回路22と、方向整合器24と、受信回路26と、信号処理回路28とからなる。
【0044】
送信制御回路20は、制御装置1からの放射指令を受けると、放射する入射音波を生成するための生成信号を送信回路22へ出力する。たとえば、送信制御回路20は、パルス状の入射音波を生成するためのパルス信号や、特定の周波数成分を含む入射音波を生成するための正弦波信号などを出力する。また、送信制御回路20は、生成信号の出力タイミングを通知するトリガ信号を受信回路26へ出力する。
【0045】
送信回路22は、送信制御回路20から受ける生成信号に応じた電気信号を方向整合器24へ出力する。
【0046】
方向整合器24は、送信回路22、トランスデューサ3および受信回路26とそれぞれ電気的に接続され、送信回路22から出力された電気信号をトランスデューサ3へ伝送し、かつ、トランスデューサ3から受けた電気信号を受信回路26へ出力する。すなわち、方向整合器24は、送信回路22から出力された電気信号が受信回路26へ出力されないように信号の伝送方向を制限する。
【0047】
受信回路26は、方向整合器24から受ける電気信号を受け、所定の増幅をした後に信号処理回路28へ出力する。また、受信回路26は、送信制御回路20からトリガ信号を受信すると、トランスデューサ3から出力される電気信号の受信を開始する。
【0048】
信号処理回路28は、受信回路26から電気信号を受け、アナログ・デジタル処理などを行ない、トランスデューサ3で受信される反射音波の瞬間的な振幅値を順次出力する。
(粘弾性特性の測定方法)
【0049】
以下、粘弾性特性の測定方法の一例である表面反射法について詳述する。表面反射法では、入射音波を被測定物SMPへ放射し、その入射音波が被測定物SMPと遅延部材4との境界において反射されて生じる反射音波が利用される。
図3は、表面反射法を説明するための図である。
図3(a)は、基準値を取得する場合を示す。
図3(b)は、被測定物SMPの粘弾性特性を取得する場合を示す。
【0050】
まず、音波センサ101から放射される入射音波の伝搬特性を規定するため、遅延部材4および被測定物SMPの音響インピーダンスを導入する。
【0051】
図3(a)を参照して、基準値を取得する場合には、遅延部材4と被測定物SMPとを接合させない状態、すなわち、遅延部材4が空気と接する状態を基準状態として、音波センサ101から入射音波を放射する。
【0052】
ここで、入射音波および反射音波の周波数をfとすると、周波数fに依存する遅延部材4の音響インピーダンスはZ1(f)と表すことができる。また、空気中の音響インピーダンスはZ0(f)と表すことができる。但し、音響インピーダンスZ0(f)およびZ1(f)は、いずれも複素数である。さらに、遅延部材4と空気中との境界における入射音波の反射率R01(f)は、式(1)で表すことができる。
【0053】
反射率R01(f)=(Z0(f)−Z1(f))/(Z0(f)+Z1(f))・・・(1)
【0054】
ここで、空気中の音響インピーダンスZ0(f)は、遅延部材4および被測定物SMPに比較して十分小さいため、周波数fに関わらず0<Z0(f)≪Z1(f)とみなすことができ、反射率R01(f)=−1となる。すなわち、遅延部材4と空気中との境界面において、入射音波は全反射するとみなすことができる。
【0055】
さらに、トランスデューサ3に入射する反射音波をA0(f)exp(iθ0(f))と表す。但し、iは虚数単位であり、A0(f)は各周波数における振幅値(実数値)であり、θ0(f)は各周波数における位相(0≦θ0(f)<∞)である。すると、遅延部材4と空気中との境界面において入射音波は全反射するので、トランスデューサ3から遅延部材4を介して被測定物SMPへ放射される入射音波は、式(2)で表される。
【0056】
A0(f)exp(iθ0(f))×R01(f)=−A0(f)exp(iθ0(f))・・・(2)
【0057】
すなわち、制御装置1は、式(2)で表される入射音波が被測定物SMPへ照射されるとみなし、式(2)を構成するA0(f)およびθ0(f)を基準値として格納する。
【0058】
一方、図3(b)を参照して、被測定物SMPの粘弾性特性を測定する場合には、被測定物SMPと遅延部材4とを密着させ、トランスデューサ3から図3(a)の場合と同一の入射音波を放射する。そして、遅延部材4と被測定物SMPとの境界面において反射される反射音波に応じた検出信号を、格納した前記の基準値と比較することで、被測定物SMPの粘弾性特性を測定する。
【0059】
被測定物SMPの音響インピーダンスをZ2(f)とすると、遅延部材4と被測定物SMPとの境界面における入射音波の反射率R12(f)は、式(3)で表すことができる。但し、音響インピーダンスZ2(f)は、複素数である。
【0060】
反射率R12(f)=(Z2(f)−Z1(f))/(Z2(f)+Z1(f))・・・(3)
さらに、式(3)を変形すると、式(4)が導出される。
【0061】
Z2(f)=Z1(f)×(1+R12(f))/(1−R12(f))・・・(4)
【0062】
ここで、トランスデューサ3に入射する反射音波をA(f)exp(iθ(f))と表す。但し、iは虚数単位であり、A(f)は各周波数における振幅値(実数値)であり、θは各周波数における位相(0≦θ0<∞)である。すると、式(2)で示される基準値を用いて、式(5)が成立する。
【0063】
A(f)exp(iθ(f))=−A0(f)exp(iθ0(f))×R12(f)・・・(5)
さらに、式(5)を変形して、式(6)が導出される。
【0064】
R12(f)=−A(f)/A0(f)×exp(i(θ(f)−θ0(f))・・・(6)
式(6)を式(4)に代入すると、式(7)が導出される。
【0065】
Z2(f)=Z1(f)×(1−A(f)/A0(f)×exp(i(θ(f)−θ0(f)))/(1+A(f)/A0(f)×exp(i(θ(f)−θ0(f)))・・・(7)
【0066】
ここで、被測定物SMPの貯蔵弾性率L’(f)および損失弾性率L”(f)は、被測定物SMPの音響インピーダンスZ2(f)および密度ρ2との間に式(8)で示す関係が成立する。
L’+iL”(f)=Z2(f)2/ρ2・・・(8)
【0067】
(7)式を(8)式に代入し、実数成分と虚数成分とを分離することにより、貯蔵弾性率L’(f)、損失弾性率L”(f)および損失正接tanδ(f)を求めることができる。
【0068】
このように、制御装置1は、音波センサ101から出力される検出信号と、予め定められた基準音波に基づく基準値との比較により、被測定物SMPの粘弾性特性を取得する。
(音波センサの構造)
【0069】
図4は、この発明の実施の形態1に従う音波センサ101の外観を示す概略図である。
【0070】
図4を参照して、音波センサ101は、立方形状の遅延部材4と、その上部に接合された円柱形状のトランスデューサ3と、さらにその上部に配置された送受信回路2とから構成される。
【0071】
上述したように、遅延部材4には、部材外部から入射光を取込んで遅延部材4と被測定物SMPとの接合部に向けて伝搬させるための光取込窓と、入射光が遅延部材4と被測定物SMPとの接合部で反射されて生じる観測光を部材外部へ取出すための光取出窓とが形成される。本発明の実施の形態1では、遅延部材4の側面に、光取込窓および光取出窓が形成される。
図5は、図4のX−X線断面図である。
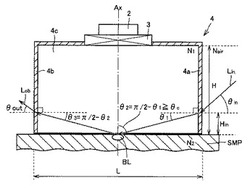
【0072】
図5を参照して、遅延部材4、トランスデューサ3および送受信回路2は、いずれも同一の中心軸Ax上に配置される。そして、遅延部材4は、遅延部材4と被測定物SMPとの接触状態を視認可能とするために、その互いに対向する側面に光取込窓4aおよび光取出窓4bが形成される。また、遅延部材4の内部媒質4cは、入射光および観測光が伝搬可能な材料、一例としてガラスやポリカーボネイトなどによって構成される。
【0073】
より詳細には、光取込窓4aおよび光取出窓4bは、遅延部材4の表層領域について、屈折率を均一化するとともに、より光波の透過度を高めるように加工することで実現される。すなわち、屈折率を均一化することで、部材外部から入射する光波の散乱を抑制して、より入射光の取込みを容易にするとともに、透過度を高めることで、取込んだ入射光を減衰させることなく遅延部材4と被測定物SMPとの接合部に向けて伝搬させることができる。
【0074】
以下、遅延部材4と被測定物SMPとの境界面において、入射光Linが全反射して観測光Lobを生じる場合の挙動について詳述する。
【0075】
まず、光取込窓4aに対する入射光Linの入射角θinと、入射光Linが遅延部材4の内部を伝搬する方向を規定する角度θ1との関係をみる。両者の間には、スネル(Snell)の法則により、空気の屈折率Nairと遅延部材4の屈折率N1とを用いて、
Nair・sinθin=N1・sinθ1
の関係が成立する。そのため、入射光Linが遅延部材4と被測定物SMPとの境界面に入射する角度θ2は、
θ2=π/2−θ1
となる。ここで、入射光Linが全反射するためには、入射する角度θ2が臨界角θc以上となる必要がある。すなわち、
θ2=π/2−θ1≧θc
が成立する必要がある。ここで、気泡BLの屈折率は、空気の屈折率と同じくNair(Nair≦N1)であるので、臨界角θcは、
θc=sin−1(Nair/N1)
となる。さらに、入射光Linの全反射によって生成される観測光Lobは、入射光Linの入射経路と対称的な経路を伝搬するので、観測光Lobが光取出窓4bに入射する角度θ3は、
θ3=π/2−θ2
となる。そして、観測光Lobが光取出窓4bを通過する場合の射出角θoutと角度θ3との間には、
N1・sinθ3=Nair・sinθout
の関係が成立する。したがって、射出角θoutは、
θout=sin−1(sinθ3・N1/Nair)
と表される。
【0076】
すなわち、上述の一連の関係式が成立する場合には、入射光Linは、遅延部材4と介在物である気泡BLとの境界で全反射する。一方、被測定物SMPの屈折率N2が遅延部材4の屈折率N1より大きければ、臨界角は存在しない。そのため、気泡BLが存在しない場合において、遅延部材4と被測定物SMPとの境界に到達した入射光Linは、遅延部材4を通過して被測定物SMPへ入射し、その一部が被測定物SMPで反射される。したがって、観測光Lobは、気泡BLに応じて変化することになり、遅延部材4と被測定物SMPとの接触状態を視認できる。そこで、光取込窓4aおよび光取出窓4bは、上述の一連の関係式が成立するように、その位置、場所、大きさ、角度などが適切に設計される。
【0077】
なお、入射光Linおよび観測光Lobが内部媒質4cを伝搬する際に、光損失が生じないとすると、全反射して生じる観測光Lobは、光取込窓4aによって取込まれた入射光と一致する。すなわち、可視光であれば、全面「白色」の光が観測される。すなわち、遅延部材4と被測定物SMPとの境界に気泡BLが介在していると、当該気泡BLに対応する領域の映像情報は、「白色」となる。
【0078】
さらに、トランスデューサ3からは、所定の立体角で入射音波が放射される。そのため、粘弾性特性を正確に測定するためには、遅延部材4と被測定物SMPとの境界面内の入射音波が入射する領域のいずれの点に対しても、気泡BLによって全反射される入射光Linを与え、および生成された観測光Lobを取出しできるように、光取込窓4aおよび光取出窓4bを形成する必要がある。
【0079】
図6は、図5において入射音波の放射域RADの光取込窓4aに対する最近端を視認する場合を示した図である。
【0080】
図6を参照して、遅延部材4と被測定物SMPとの境界において、トランスデューサ3から放射される入射音波の放射域RADの紙面右端に介在する気泡BLを視認するためには、図5における一連の関係式が成立する必要がある。
【0081】
ここで、遅延部材4と被測定物SMPとの境界面における遅延部材4の幅長をLとし、入射音波が入射する領域の幅長をx(x≦L)とすると、入射光Linの入射位置Hin、および放射域RADの右端と光取込窓4aとの距離(L−x)/2を適切に設計する必要がある。
【0082】
図7は、図5において入射音波の放射域RADの光取込窓4aに対する最遠端を視認する場合を示した図である。
【0083】
図7を参照して、遅延部材4と被測定物SMPとの境界において、トランスデューサ3から放射される入射音波の放射域RADの紙面左端に介在する気泡BLを視認するためには、図5における一連の関係式が成立する必要がある。
【0084】
図6と同様に、遅延部材4と被測定物SMPとの境界面における遅延部材4の幅長をLとし、入射音波が入射する領域の幅長をx(x≦L)とすると、観測光Lobの射出位置Hout、および放射域RADの左端と光取出窓4bとの距離(L−x)/2を適切に設計する必要がある。
【0085】
すなわち、光取込窓4aは、遅延部材4と被測定物SMPとの境界面内の入射音波が入射する領域に含まれる各点において、気泡BLに応じた観測光Lobを生成するための入射光Linを取込み可能に構成され、光取出窓4bは、入射音波が入射する領域に含まれる各々の点において生成される観測光をいずれも取出し可能に構成される。
(設計例)
【0086】
図5を参照して、遅延部材4と被測定物SMPとの間に介在する、中心軸Ax上の気泡BLを視認する場合の設計例について例示する。
【0087】
一例として、遅延部材4の幅長L=50mmとし、空気の屈折率Nair=1.0,遅延部材4の屈折率N1=1.5,被測定物SMPの屈折率N2=2.0とする。なお、遅延部材4の材質はガラスであり、被測定物SMPの材質はポリマーである。
【0088】
たとえば入射光Linの入射角θin=60.0°とすると、光取込窓4aで屈折して生じる角度θ1=35.6°となる。そのため、入射光Linが遅延部材4と被測定物SMPとの境界面に入射する角度θ2=54.4°となる。
【0089】
ここで、臨界角θc=sin−1(Nair/N1)=41.8°であるので、角度θ2≧臨界角θcが成立する。すなわち、入射光Linは、遅延部材4と被測定物SMPとの間に介在する気泡BLによって全反射する。さらに、観測光Lobが光取出窓4bに入射する角度θ3=35.6°であるので、観測光Lobが光取出窓4bから射出される射出角θout=60.0°が得られる。
【0090】
このように、各角度が有意な値に決定できるので、光取込窓4aから取込まれる入射光Linが順次伝搬して、光取出窓4bから射出される経路が形成されることが数学的に示される。なお、入射光Linが入射する入射位置Hin=17.9mmとなるので、遅延部材4は、その高さHが17.9mmを確保できるように形成される。
【0091】
なお、上述の説明においては、光取込窓4aおよび光取出窓4bを明確に区別して記載したが、光取込窓4aおよび光取出窓4bは、その機能において互いに相補の関係にある。すなわち、たとえば、図5などにおいて、光取出窓4bから入射光を与えることも可能であり、この場合には、光取込窓4aが光取出窓4bの機能を実現する。そのため、光取込窓4aおよび光取出窓4bは、入射光の光源位置および観測光Lobの視認位置などに応じて、機能的に定まることになる。
【0092】
この発明の実施の形態1によれば、部材外部から入射光波を取込んで遅延部材と被測定物との接合部に向けて伝搬させるための光取込窓と、入射光が接合部で反射されて生じる観測光を部材外部へ取出すための光取出窓とが形成された遅延部材が用いられる。さらに、光取込窓は、遅延部材と被測定物との境界に介在物が存在する場合に限って、当該介在物によって入射光が全反射されるように入射光を接合部へ導く。これにより、介在物が存在する領域で生成された観測光は、入射光と略一致する一方、介在物が存在しない領域で生成された観測光には、被測定物の映像情報が含まれる。したがって、介在物が存在するか否かに応じて、観測光には有意な差異が生じるため、音波センサと被測定物との接触状態を視認できる。
[実施の形態2]
【0093】
この発明の実施の形態1では、立方体形状を有する遅延部材について例示したが、他の形状を採用してもよい。そこで、以下に説明するこの発明の実施の形態2においては、錐面を含む形状の遅延部材を用いる構成について説明する。
【0094】
この発明の実施の形態2に従う粘弾性測定装置は、音波センサの遅延部材の形状を除いて、上述のこの発明の実施の形態1に従う粘弾性測定装置100と同様であるので、詳細な説明は繰返さない。
【0095】
図8は、この発明の実施の形態2に従う音波センサ102の外観を示す概略図である。
【0096】
図8を参照して、音波センサ102は、いわゆる「そろばん珠」形状の遅延部材5と、その上部に接合された円柱形状のトランスデューサ3と、さらにその上部に配置された送受信回路2とから構成される。
【0097】
遅延部材5は、2つの円錐台形を共通の底面で接合したような形状に構成され、その錐面を含む表面領域に光取込窓および光取出窓が形成される。
図9は、図8のIX−IX線断面図である。
【0098】
図9を参照して、遅延部材5、トランスデューサ3および送受信回路2は、いずれも同一の中心軸Ax上に配置される。そして、遅延部材5の上側の円錐台形に相当する領域に、光取込窓5aおよび光取出窓5bが形成される。光取込窓5aは、遅延部材5と被測定物SMPの境界面に対する入射光Linの入射角θinが、遅延部材5の屈折率と気泡BLの屈折率とに応じて定まる臨界角θc以上となるように、取込んだ入射光Linを当該接合部へ導く。これにより、入射光Linは、遅延部材5と被測定物SMPと間に介在する気泡BLによっていわゆる全反射を生じる一方、気泡BLが存在しない場合には、被測定物SMPで反射される。したがって、観測光Lobは、遅延部材5と被測定物SMPとの接触状態を表す映像情報を含む。さらに、この観測光Lobは、光取出窓5bによって部材外部へ取出され、接触状態が視認される。
【0099】
なお、この発明の実施の形態2においては、入射光Linおよび観測光Lobの経路に応じて、光取込窓5aおよび光取出窓5bの機能を果たす領域がそれぞれ定まるため、光取込窓5aおよび光取出窓5bを予め明確に区別して形成する必要はない。
【0100】
光取込窓5aおよび光取出窓5bの形成方法などは、上述したこの発明の実施の形態1と同様であるので、詳細な説明は繰返さない。また、遅延部材5の内部媒質などについても、上述の遅延部材4と同様であるので、詳細な説明は繰返さない。
【0101】
以下、遅延部材5と被測定物SMPとの境界面において、入射光Linが全反射して観測光Lobを生じる場合の挙動について詳述する。
【0102】
まず、光取込窓5aに対する入射光Linの入射角θinと、入射光Linが遅延部材5の内部を伝搬する方向を規定する角度θ1との関係をみる。両者の間には、スネルの法則により、空気の屈折率Nairと遅延部材5の屈折率N1とを用いて、
Nair・sinθin=N1・sinθ1
の関係が成立する。ここで、遅延部材5と被測定物SMPとの境界面に対する光取込窓5aおよび光取出窓5bのなす角度をα1とすると、入射光Linが遅延部材5と被測定物SMPとの境界面に入射する角度θ2は、
θ2=θ1+α1
となる。ここで、入射光Linが全反射するためには、入射する角度θ2が臨界角θc以上となる必要がある。すなわち、
θ2=θ1+α1≧θc
が成立する必要がある。ここで、気泡BLの屈折率は、空気の屈折率と同じくNair(Nair≦N1)であるので、臨界角θcは、
θc=sin−1(Nair/N1)
となる。さらに、入射光Linの全反射によって生成される観測光Lobは、入射光Linの入射経路と中心軸Axに対して対称的な経路を伝搬するので、観測光Lobが光取出窓5bに入射する角度θ3は、
θ3=θ2−α1=θ1
となる。そして、観測光Lobが光取出窓5bを通過する場合の射出角θoutと角度θ3との間には、
N1・sinθ3=Nair・sinθout
の関係が成立する。したがって、射出角θoutは、
θout=sin−1(sinθ3・N1/Nair)
と表される。
【0103】
すなわち、上述の一連の関係式が成立する場合には、入射光Linが遅延部材5と被測定物SMPと間に介在する気泡BLによって全反射し、遅延部材5と被測定物SMPとの接触状態を表す映像情報を含む観測光Lobが視認できることを意味する。したがって、光取込窓5aおよび光取出窓5bは、上述の一連の関係式が成立するように、その位置、場所、大きさ、角度などが適切に設計される。
【0104】
さらに、トランスデューサ3からは、所定の立体角で入射音波が放射される。そのため、粘弾性特性を正確に測定するためには、遅延部材5と被測定物SMPとの境界面内の入射音波が入射する領域のいずれの点に対しても、気泡BLによって全反射される入射光Linを与え、および生成された観測光Lobを取出しできるように、光取込窓5aおよび光取出窓5bを形成する必要がある。
【0105】
図10は、図9において入射音波の放射域RADの光取込窓5aに対する最近端を視認する場合を示した図である。
【0106】
図10を参照して、遅延部材5と被測定物SMPとの境界において、トランスデューサ3から放射される入射音波の放射域RADの紙面右端に介在する気泡BLを視認するためには、図9における一連の関係式が成立する必要がある。そのため、光取込窓5aおよび光取出窓5bの錐面の長さおよび角度などを適切に設計する必要がある。特に、光取込窓5aに入射光Linが入射する入射位置Hin、および光取出窓5bから観測光Lobが射出する射出位置Houtを適切に設計する必要がある。
【0107】
なお、この発明の実施の形態2に従う遅延部材5は、中心軸Axに対して対称に構成されるので、入射音波の放射域RADの光取込窓5aに対する最近端を視認可能に構成すれば、必然的に、入射音波の放射域RADの光取込窓5aに対する最遠端も視認可能となる。
(設計例)
【0108】
図9を参照して、遅延部材5と被測定物SMPとの間に介在する、中心軸Ax上の気泡BLを視認する場合の設計例について例示する。
【0109】
一例として、遅延部材5の底面部の直径L=50mmとし、遅延部材5と被測定物SMPとの境界面に対する光取込窓5aおよび光取出窓5bのなす角度α1=35°とし、空気の屈折率Nair=1.0,遅延部材5の屈折率N1=1.5,被測定物SMPの屈折率N2=2.0とする。
【0110】
たとえば入射光の光取込窓5aに対する入射角θin=15.0°とすると、光取込窓5aで屈折して生じる角度θ1=9.93°となる。そのため、入射光Linが遅延部材5と被測定物SMPとの境界面に入射する角度θ2=44.93°となる。
【0111】
ここで、臨界角θc=sin−1(Nair/N1)=41.8°であるので、角度θ2≧臨界角θcが成立する。すなわち、入射光Linは、遅延部材5と被測定物SMPとの間に介在する気泡BLによって全反射する。さらに、観測光Lobが光取出窓5bに入射する角度θ3=9.93°であるので、観測光Lobが光取出窓5bから射出される射出角θout=15.0°が得られる。
【0112】
このように、各角度が有意な値に決定できるので、光取込窓5aから取込まれる入射光Linが順次伝搬して、光取出窓5bから射出される経路が形成されることが数学的に示される。
【0113】
さらに、図10を参照して、遅延部材5と被測定物SMPとの間に介在する、放射域RADの光取込窓5aに対する最近端の位置に介在する気泡BLを視認する場合の設計例について例示する。なお、遅延部材5と被測定物SMPとの境界面における放射域RADの直径x=40mmとする。
【0114】
上述したのと同様に、入射光の光取込窓5aに対する入射角θin=15.0°とすると、光取込窓5aで屈折して生じる角度θ1=9.93°となり、入射光Linが遅延部材5と被測定物SMPとの境界面に入射する角度θ2=44.93°となる。さらに、観測光Lobが光取出窓5bに入射する角度θ3=9.93°であるので、観測光Lobが光取出窓5bから射出される射出角θout=15.0°が得られる。
【0115】
ここで、入射光Linが入射する入射位置Hin=4.47mmとなる。そのため、光取込窓5aおよび光取出窓5bは、それぞれの高さが遅延部材5と被測定物SMPとの境界面から4.47mmを確保できるように形成することで、放射域RADのいずれの点に対しても、視認することができる。
【0116】
この発明の実施の形態2によれば、部材外部から入射光波を取込んで遅延部材と被測定物との接合部に向けて伝搬させるための光取込窓と、入射光が接合部で反射されて生じる観測光を部材外部へ取出すための光取出窓とが形成された遅延部材が用いられる。さらに、光取込窓は、遅延部材と被測定物との境界に介在物が存在する場合に限って、当該介在物によって入射光が全反射されるように入射光を接合部へ導く。これにより、介在物が存在する領域で生成された観測光は、入射光と略一致する一方、介在物が存在しない領域で生成された観測光には、被測定物の映像情報が含まれる。したがって、介在物が存在するか否かに応じて、観測光には有意な差異が生じるため、音波センサと被測定物との接触状態を視認できる。
【0117】
また、この発明の実施の形態2に係る光取込窓および光取出窓は、上述のこの発明の実施の形態1に比較して、遅延部材と被測定物との境界面に対する角度がより小さくなるように形成される。これにより、入射光および観測光の伝搬方向が遅延部材と被測定物との境界面に対してより垂直方向になるので、より容易な視認を実現できる。
[実施の形態3]
【0118】
この発明の実施の形態2では、2つの円錐台形が接合された形状を有する遅延部材について例示したが、この発明の実施の形態3においては、円錐台形状の遅延部材を用いる構成について説明する。
【0119】
この発明の実施の形態3に従う粘弾性測定装置は、音波センサの遅延部材の形状を除いて、上述のこの発明の実施の形態1に従う粘弾性測定装置100と同様であるので、詳細な説明は繰返さない。
【0120】
図11は、この発明の実施の形態3に従う音波センサ103の外観を示す概略図である。
【0121】
図11を参照して、音波センサ103は、円錐台形状の遅延部材6と、その上部に接合された円柱形状のトランスデューサ3と、さらにその上部に配置された送受信回路2とから構成される。
【0122】
遅延部材6は、より広い断面積をもつ面を底面側に配置した円錐台形の形状を有し、その錐面を含む表面領域に光取込窓および光取出窓が形成される。
図12は、図11のXII−XII線断面図である。
【0123】
図12を参照して、遅延部材6、トランスデューサ3および送受信回路2は、いずれも同一の中心軸Ax上に配置される。そして、遅延部材6の錐面およびトランスデューサ3との接合面を除く上面に、光取込窓6aおよび光取出窓6bが形成される。光取込窓6aは、遅延部材6と被測定物SMPの境界面に対する入射光Linの入射角θinが、遅延部材6の屈折率と気泡BLの屈折率とに応じて定まる臨界角θc以上となるように、取込んだ入射光Linを当該接合部へ導く。これにより、入射光Linは、遅延部材6と被測定物SMPと間に介在する気泡BLによっていわゆる全反射を生じる一方、気泡BLが存在しない場合には、被測定物SMPで反射される。したがって、観測光Lobは、遅延部材6と被測定物SMPとの接触状態を表す映像情報を含む。さらに、この観測光Lobは、光取出窓6bによって部材外部へ取出され、接触状態が視認される。
【0124】
なお、この発明の実施の形態3においては、入射光Linおよび観測光Lobの経路に応じて、光取込窓6aおよび光取出窓6bの機能を果たす領域がそれぞれ定まるため、光取込窓6aおよび光取出窓6bを予め明確に区別して形成する必要はない。
【0125】
光取込窓6aおよび光取出窓6bの形成方法などは、上述したこの発明の実施の形態1と同様であるので、詳細な説明は繰返さない。また、遅延部材6の内部媒質などについても、上述の遅延部材4と同様であるので、詳細な説明は繰返さない。
【0126】
この発明の実施の形態3に従う光取込窓6aおよび光取出窓6bは、上述のこの発明の実施の形態2に従う光取込窓5aおよび光取出窓5bを被測定物SMPとの境界面方向に延長したものと等価であるので、入射光Linおよび観測光Lobの挙動は、この発明の実施の形態2に従う遅延部材5における挙動と同様となる。そのため、入射光Linおよび観測光Lobの挙動についての詳細な説明は繰返さない。
【0127】
図13は、図12において入射音波の放射域RADの光取込窓6aに対する最近端を視認する場合を示した図である。
【0128】
図13を参照して、遅延部材6と被測定物SMPとの境界面において、トランスデューサ3から放射される入射音波の放射域RADの紙面右端に介在する気泡BLを視認するためには、図12における一連の関係式が成立する必要がある。そのため、光取込窓6aおよび光取出窓6bの長さおよび角度などを適切に設計する必要がある。特に、光取込窓6aに入射光Linが入射する入射位置Hin、および光取出窓6bから観測光Lobが射出する射出位置Houtを適切に設計する必要がある。
【0129】
なお、この発明の実施の形態3に従う遅延部材6は、中心軸Axに対して対称に構成されるので、入射音波の放射域RADの光取込窓6aに対する最近端を視認可能に構成すれば、必然的に、入射音波の放射域RADの光取込窓6aに対する最遠端も視認可能となる。
(設計例)
【0130】
図12を参照して、遅延部材6と被測定物SMPとの間に介在する、中心軸Ax上の気泡BLを視認する場合の設計例について例示する。
【0131】
一例として、遅延部材6の底面部の直径L=50mmとし、遅延部材6と被測定物SMPとの境界面に対する光取込窓6aおよび光取出窓6bのなす角度α1=30°とし、空気の屈折率Nair=1.0,遅延部材6の屈折率N1=1.5,被測定物SMPの屈折率N2=2.0とする。
【0132】
たとえば入射光の光取込窓6aに対する入射角θin=15.0°とすると、光取込窓6aで屈折して生じる角度θ1=9.93°となる。そのため、入射光Linが遅延部材6と被測定物SMPとの境界面に入射する角度θ2=44.93°となる。
【0133】
ここで、臨界角θc=sin−1(Nair/N1)=41.8°であるので、角度θ2≧臨界角θcが成立する。すなわち、入射光Linは、遅延部材6と被測定物SMPとの間に介在する気泡BLによって全反射する。さらに、観測光Lobが光取出窓6bに入射する角度θ3=9.93°であるので、観測光Lobが光取出窓6bから射出される射出角θout=15.0°が得られる。
【0134】
このように、各角度が有意な値に決定できるので、光取込窓6aから取込まれる入射光Linが順次伝搬して、光取出窓6bから射出される経路が形成されることが数学的に示される。
【0135】
この発明の実施の形態3によれば、部材外部から入射光波を取込んで遅延部材と被測定物との接合部に向けて伝搬させるための光取込窓と、入射光が接合部で反射されて生じる観測光を部材外部へ取出すための光取出窓とが形成された遅延部材が用いられる。さらに、光取込窓は、遅延部材と被測定物との境界に介在物が存在する場合に限って、当該介在物によって入射光が全反射されるように入射光を接合部へ導く。これにより、介在物が存在する領域で生成された観測光は、入射光と略一致する一方、介在物が存在しない領域で生成された観測光には、被測定物の映像情報が含まれる。したがって、介在物が存在するか否かに応じて、観測光には有意な差異が生じるため、音波センサと被測定物との接触状態を視認できる。
【0136】
また、この発明の実施の形態3に係る遅延部材は、より広い断面積をもつ面で被測定物と密着するように構成されるので、粘弾性特性の測定対象領域が比較的広い場合であっても、確実に音波センサと被測定物との接触状態を視認できる。
[実施の形態4]
【0137】
上述のこの発明の実施の形態1〜3においては、光取込窓によって取込まれた入射光が遅延部材と被測定物との間に介在する気泡によって全反射される構成について例示した。一方、この発明の実施の形態4においては、光取込窓によって取込まれた入射光が遅延部材と被測定物との間に介在する気泡に入射する構成について説明する。
【0138】
この発明の実施の形態4に従う粘弾性測定装置は、音波センサの遅延部材における各設計値を除いて、図1、図2および図4に示すこの発明の実施の形態1に従う粘弾性測定装置100と同様であるので、詳細な説明は繰返さない。
図14は、この発明の実施の形態4に従う音波センサの断面図である。
【0139】
図14を参照して、この発明の実施の形態4に従う音波センサは、同一の中心軸Ax上に配置される遅延部材#4、トランスデューサ3および送受信回路2からなる。そして、
遅延部材#4は、被測定物SMPを視認可能とするために、その互いに対向する側表面に光取込窓#4aおよび光取出窓#4bが形成される。
【0140】
光取込窓#4aは、部材外部から入射光Linを取込んで、取込んだ入射光Linを遅延部材#4と被測定物SMPとの接合部に向けて伝搬させ、光取出窓#4bは、入射光Linが遅延部材#4と被測定物SMPとの接合部で反射されて生じる観測光Lobを部材外部へ取出す。
【0141】
より詳細には、遅延部材#4と被測定物SMPとの境界に介在物である気泡BLが存在する場合には、入射光Linは、介在する気泡BLに入射して伝搬後に、気泡BLと被測定物SMPとの境界で反射されて、観測光Lobを生成する。一方、遅延部材#4と被測定物SMPとの境界に介在物である気泡BLが存在しない場合には、入射光Linは、遅延部材#4と接する被測定物SMPによって反射されて観測光Lobを生成する。そのため、気泡BLの有無に関わらず、観測光Lobには、被測定物SMPの表面状態についての映像情報が含まれるが、気泡BLが存在する場合には、気泡BL自体の映像情報も観測光Lobに含まれることになる。したがって、気泡BLの有無に応じて、観測光Lobには有意な差異が生じるため、遅延部材#4と被測定物SMPとの接触状態を視認できる。
また、上述の実施の形態1〜3で示したような全反射して生じる観測光を用いる場合には、被測定物SMPが白色であれば、観測光との色の差異がわずかになるので、気泡BLの存在を観測しにくいことも想定されるが、本実施の形態によれば、白色の被測定物SMPに対しても、確実に気泡BLの有無を確認できる。
【0142】
要約すると、光取込窓#4aは、入射光が遅延部材#4と気泡BLとの境界に到達すると、遅延部材#4を通過して気泡BLへ入射した後、気泡BLと被測定物SMPとの境界で反射されるように、入射光を遅延部材#4と被測定物SMPとの接合部へ導く。すなわち、光取込窓#4aは、遅延部材#4と被測定物SMPとの境界面に対する入射光の入射角が、遅延部材#4の屈折率と気泡BLの屈折率とに応じて定まる臨界角より小さくなるように、入射光Linを当該接合部へ導く。
【0143】
光取込窓#4aおよび光取出窓#4bの形成方法などは、上述したこの発明の実施の形態1と同様であるので、詳細な説明は繰返さない。また、遅延部材#4の内部媒質などについても、上述の遅延部材4と同様であるので、詳細な説明は繰返さない。
【0144】
以下、入射光Linが被測定物SMPで反射されて観測光Lobを生じる場合の挙動について詳述する。特に、中心軸Ax上であって、遅延部材#4と被測定物SMPとの境界面に介在する気泡BLを介して被測定物SMPを視認する場合について説明する。
【0145】
まず、光取込窓#4aに対する入射光Linの入射角θinと、入射光Linが遅延部材#4の内部を伝搬する方向を規定する角度θ1との関係をみる。両者の間には、スネルの法則により、空気の屈折率Nairと遅延部材#4の屈折率N1とを用いて、
Nair・sinθin=N1・sinθ1
の関係が成立する。そのため、入射光Linが遅延部材#4と被測定物SMPとの境界面に入射する角度θ2は、
θ2=π/2−θ1
となる。ここで、入射光Linが遅延部材#4を通過するためには、入射する角度θ2が臨界角θcより小さくなる必要がある。すなわち、
θ2=π/2−θ1<θc
が成立する必要がある。ここで、気泡BLの屈折率は、空気の屈折率と同じくNair(Nair≦N1)であるので、臨界角θcは、
θc=sin−1(Nair/N1)
となる。
【0146】
図15は、遅延部材#4と気泡BLとの境界における光波の挙動を説明するための図である。
【0147】
図15を参照して、被測定物SMPに入射する入射光Linの角度θ2と、入射光Linが気泡BL内に入射する角度θ3との関係をみる。両者の間には、スネルの法則により、遅延部材#4の屈折率N1と空気の屈折率Nairとを用いて、
N1・sinθ2=Nair・sinθ3
の関係が成立する。そのため、入射光Linが気泡BLと被測定物SMPとの境界面に入射する角度θ4は、
θ4=π/2−θ3
となる。ここで、屈折率Nair>屈折率N2であれば、気泡BLと被測定物SMPとの境界に到達した入射光Linは、被測定物SMPへ入射し、その一部が被測定物SMPで反射され、観測光Lobが生成される。生成される観測光Lobは、入射光Linの入射経路と対称的な経路を伝搬するので、観測光Lobが気泡BLと遅延部材#4との境界面に入射する角度θ5は、
θ5=π/2−θ4=θ3
となる。さらに、遅延部材#4の内部を伝搬する観測光Lobが遅延部材#4と被測定物SMPとの境界面に対して成す角度θ6には、
【0148】
N1・sinθ6=Nair・sinθ5=Nair・sinθ3=N1・sinθ2
の関係が成立するので、
θ6=θ2
となる。さらに、再度、図14を参照して、観測光Lobが光取出窓4bに入射する角度θ7は、
θ7=π/2−θ6
となる。そして、観測光Lobが光取出窓4bを通過する場合の射出角θoutと角度θ3との間には、
N1・sinθ7=Nair・sinθout
の関係が成立する。したがって、射出角θoutは、
θout=sin−1(sinθ7・N1/Nair)
と表される。
【0149】
すなわち、上述の一連の関係式が成立する場合には、入射光Linは、遅延部材#4と気泡BLとの境界を通過した後、気泡BLと被測定物SMPとの境界で反射されることで、被測定物SMPの状態に応じた映像情報を含む観測光Lobが生成される。したがって、光取込窓#4aおよび光取出窓#4bは、上述の一連の関係式が成立するように、その位置、場所、大きさ、角度などが適切に設計される。
【0150】
なお、遅延部材#4と被測定物SMPとの境界に気泡BLが介在しない場合には、入射光Linは、遅延部材4を通過して被測定物SMPへ入射し、その一部が被測定物SMPで反射される。
【0151】
さらに、トランスデューサ3からは、所定の立体角で入射音波が放射される。そのため、粘弾性特性を正確に測定するためには、遅延部材#4と被測定物SMPとの境界面内の入射音波が入射する領域のいずれの点に対しても、気泡BLに入射した後に反射される入射光Linおよび観測光Lobが存在するように、光取込窓#4aおよび光取出窓#4bを形成する必要がある。
【0152】
図16は、図15において入射音波の放射域RADの光取込窓#4aに対する最近端を視認する場合を示した図である。
【0153】
図16を参照して、遅延部材#4と被測定物SMPとの境界において、トランスデューサ3から放射される入射音波の放射域RADの紙面右端に介在する気泡BLを視認するためには、図15における一連の関係式が成立する必要がある。
【0154】
ここで、遅延部材#4と被測定物SMPとの境界面における遅延部材4の幅長をLとし、入射音波が入射する領域の幅長をx(x≦L)とすると、観測光Lobの入射位置Hin、および放射域RADの右端と光取込窓4aとの距離(L−x)/2を適切に設計する必要がある。
【0155】
図17は、図15において入射音波の放射域RADの光取込窓#4aに対する最遠端を視認する場合を示した図である。
【0156】
図17を参照して、遅延部材#4と被測定物SMPとの境界において、トランスデューサ3から放射される入射音波の放射域RADの紙面左端に介在する気泡BLを視認するためには、図15における一連の関係式が成立する必要がある。
【0157】
図16と同様に、遅延部材#4と被測定物SMPとの境界面における遅延部材4の幅長をLとし、入射音波が入射する領域の幅長をx(x≦L)とすると、観測光Lobの射出位置Hout、および放射域RADの紙面左端と光取出窓#4bとの距離(L−x)/2を適切に設計する必要がある。
【0158】
すなわち、光取込窓#4aは、遅延部材#4と被測定物SMPとの境界面内の入射音波が入射する領域の各点において、気泡BLに応じた観測光Lobを生成するための入射光Linを取込み可能に構成され、光取出窓#4bは、入射音波が入射する領域の各々の点において生成される観測光Lobをいずれも取出し可能に構成される。
(設計例)
【0159】
図14を参照して、遅延部材#4と被測定物SMPとの間に介在する、中心軸Ax上の気泡BLを視認する場合の設計例について例示する。
【0160】
一例として、遅延部材#4の幅長L=50mmとし、空気の屈折率Nair=1.0,遅延部材#4の屈折率N1=1.1,被測定物SMPの屈折率N2=1.65とする。
【0161】
たとえば入射光の入射角θin=30.0°とすると、光取込窓#4aで屈折して生じる角度θ1=27.0°となる。そのため、入射光Linが遅延部材#4と被測定物SMPとの境界面に入射する角度θ2=63.0°となる。
【0162】
ここで、遅延部材#4と被測定物SMPとの間に介在する気泡BLの臨界角θc=sin−1(Nair/N1)=65.4°であるので、角度θ2<臨界角θcが成立する。すなわち、遅延部材#4と気泡BLとの境界面に到達した入射光Linは、遅延部材#4を通過して気泡BLへ入射する。
【0163】
再度、図15を参照して、気泡BLに入射した入射光Linは、遅延部材#4と気泡BLとの境界面において屈折して、角度θ3の角度で気泡BL内を伝搬する。このとき、角度θ3=36.4°となるので、入射光Linの気泡BLと被測定物SMPとの境界面に入射する角度も36.4°となる。入射光Linが気泡BLと被測定物SMPとの境界面で反射されて観測光Lobを生じる。そして、観測光Lobが気泡BLと遅延部材#4との境界面に最入射する角度θ5=θ3=36.4°となり、観測光Lobが当該境界面から射出される角度θ6=θ2=63.0°となる。
【0164】
再度、図14を参照して、観測光Lobが光取出窓#4bに入射する角度θ7=27.0°であるので、観測光Lobが光取出窓#4bから射出される射出角θout=30.0°が得られる。
【0165】
このように、各角度が有意な値に決定できるので、遅延部材#4と被測定物SMPとの境界に気泡BLが介在していれば、光取込窓#4aから取込まれる入射光Linが順次伝搬して、光取出窓#4bから射出される経路が形成されることが数学的に示される。
【0166】
さらに、図16を参照して、遅延部材#4と被測定物SMPとの間に介在する、放射域RADの光取込窓#4aに対する最近端の位置に介在する気泡BLを視認する場合の設計例について例示する。なお、遅延部材#4と被測定物SMPとの境界面における放射域RADの幅長x=40mmとする。
【0167】
上述したのと同様に、入射光Linの光取込窓#4に対する入射角θin=30.0°とすると、光取込窓#4aで屈折して生じる角度θ1=27.0°となり、入射光Linが遅延部材#4と被測定物SMPとの境界面に入射する角度θ2=63.0°となる。
【0168】
ここで、入射音波の放射域RADの紙面右端に入射光Linを入射可能とするためには、入射光Linは、入射位置Hin=2.54mmにおいて光取込窓#4aによって取込まれる必要がある。すなわち、入射位置Hin=2.54mmより高い位置で入射光Linを取込むように構成することで、放射域RADのいずれの点に対しても、遅延部材#4と被測定物SMPとの接触状態を視認することができる。
【0169】
なお、上述の説明においては、光取込窓#4aおよび光取出窓#4bを明確に区別して記載したが、光取込窓#4aおよび光取出窓#4bは、その機能において互いに相補の関係にある。すなわち、光取込窓#4aおよび光取出窓#4bは、入射光の光源位置などに応じて、機能的に定まることになる。
【0170】
この発明の実施の形態4によれば、部材外部から入射光波を取込んで遅延部材と被測定物との接合部に向けて伝搬させるための光取込窓と、入射光が接合部で反射されて生じる観測光を部材外部へ取出すための光取出窓とが形成された遅延部材が用いられる。さらに、光取込窓は、遅延部材と被測定物との境界に気泡などの介在物が存在する場合には、当該気泡に入射した後に、当該気泡と被測定物との境界で反射されて観測光を生成するように、入射光を接合部へ導く。これにより、介在物が存在する領域で生成された観測光は、気泡自体の映像情報を含むようになる。したがって、介在物が存在するか否かに応じて、観測光には有意な差異が生じるため、音波センサと被測定物との接触状態を視認できる。
[実施の形態5]
【0171】
この発明の実施の形態4では、立方体形状を有する遅延部材について、光取込窓によって取込まれた入射光が遅延部材を通過して介在物に入射する構成について例示した。一方、この発明の実施の形態5においては、2つの円錐台形からなる遅延部材について、光取込窓によって取込まれた入射光が遅延部材を通過して介在物に入射する構成について説明する。
【0172】
この発明の実施の形態5に従う粘弾性測定装置は、音波センサの遅延部材における各設計値を除いて、図8に示すこの発明の実施の形態2に従う粘弾性測定装置と同様であるので、詳細な説明は繰返さない。
図18は、この発明の実施の形態5に従う音波センサの断面図である。
【0173】
図18を参照して、この発明の実施の形態5に従う音波センサは、同一の中心軸Ax上に配置される遅延部材#5、トランスデューサ3および送受信回路2からなる。そして、
遅延部材#5の上側の円錐台形に相当する領域に、光取込窓#5aおよび光取出窓#5bが形成される。より詳細には、光取込窓#5aは、入射光が遅延部材#5と気泡BLとの境界に到達すると、遅延部材#5を通過して気泡BLへ入射した後、気泡BLと被測定物SMPとの境界で反射されるように、入射光を遅延部材#5と被測定物SMPとの接合部へ導く。すなわち、光取込窓#5aは、遅延部材#5と被測定物SMPとの境界面に対する入射光の入射角が、遅延部材#5の屈折率と気泡BLの屈折率とに応じて定まる臨界角より小さくなるように、入射光Linを当該接合部へ導く。これにより、気泡BLの有無に応じて、観測光Lobには有意な差異が生じるため、遅延部材#5と被測定物SMPとの接触状態を視認できる。
【0174】
光取込窓#5aおよび光取出窓#5bの形成方法などは、上述したこの発明の実施の形態1と同様であるので、詳細な説明は繰返さない。また、遅延部材#5の内部媒質などについても、上述の遅延部材4と同様であるので、詳細な説明は繰返さない。
【0175】
以下、入射光Linが被測定物SMPで反射されて観測光Lobを生じる場合の挙動について詳述する。特に、中心軸Ax上であって、遅延部材#5と被測定物SMPとの境界面に介在する気泡BLを介して被測定物SMPを視認する場合について説明する。
【0176】
まず、光取込窓#5aに対する入射光Linの入射角θinと、入射光Linが遅延部材#5の内部を伝搬する方向を規定する角度θ1との関係をみる。両者の間には、スネルの法則により、空気の屈折率Nairと遅延部材#5の屈折率N1とを用いて、
Nair・sinθin=N1・sinθ1
の関係が成立する。ここで、遅延部材#5と被測定物SMPとの境界面に対する光取込窓#5aおよび光取出窓#5bのなす角度をα2とすると、入射光Linが遅延部材#5と被測定物SMPとの境界面に入射する角度θ2は、
θ2=θ1+α2
となる。ここで、入射光Linが遅延部材#5を通過するためには、入射する角度θ2が臨界角θcより小さくなる必要がある。すなわち、
θ2=θ1+α2<θc
が成立する必要がある。ここで、気泡BLの屈折率は、空気の屈折率と同じくNair(Nair≦N1)であるので、臨界角θcは、
θc=sin−1(Nair/N1)
となる。遅延部材#5を通過した後の入射光Linの挙動については、上述のこの発明の実施の形態4において、図15に示した内容と同様であるので、詳細な説明は繰返さない。
【0177】
そして、気泡BLと被測定物SMPとの境界面で反射されて生成される観測光Lobが遅延部材#4と被測定物SMPとの境界面に対して成す角度θ6は、角度θ2と一致する。そのため、観測光Lobが光取出窓#5bに入射する角度θ7は、
θ7=θ6−α2=θ2−α2=θ1
となる。そして、観測光Lobが光取出窓#5bを通過する場合の射出角θoutと角度θ7との間には、
N1・sinθ7=Nair・sinθout
の関係が成立する。したがって、射出角θoutは、
θout=sin−1(sinθ7・N1/Nair)
と表される。
【0178】
すなわち、上述の一連の関係式が成立する場合には、入射光Linは、遅延部材#5と気泡BLとの境界を通過した後、気泡BLと被測定物SMPとの境界で反射されることで、被測定物SMPの状態に応じた映像情報を含む観測光Lobが生成される。したがって、光取込窓#5aおよび光取出窓#5bは、上述の一連の関係式が成立するように、その位置、場所、大きさ、角度などが適切に設計される。
【0179】
さらに、トランスデューサ3からは、所定の立体角で入射音波が放射される。そのため、粘弾性特性を正確に測定するためには、遅延部材#4と被測定物SMPとの境界面内の入射音波が入射する領域のいずれの点に対しても、全反射を生じる入射光Linおよび観測光Lobが存在するように、光取込窓#5aおよび光取出窓#5bを形成する必要がある。
【0180】
図19は、図18において入射音波の放射域RADの光取込窓#5aに対する最近端を視認する場合を示した図である。
【0181】
図19を参照して、遅延部材#5と被測定物SMPとの境界において、トランスデューサ3から放射される入射音波の放射域RADの紙面右端に介在する気泡BLを視認するためには、図18における一連の関係式が成立する必要がある。そのため、光取込窓#5aおよび光取出窓#5bの長さおよび角度などを適切に設計する必要がある。特に、光取込窓#5aに入射光Linが入射する入射位置Hin、および光取出窓#5bから観測光Lobが射出する射出位置Houtを適切に設計する必要がある。
【0182】
なお、この発明の実施の形態5に従う遅延部材5#は、中心軸Axに対して対称に構成されるので、入射音波の放射域RADの光取込窓#5aに対する最近端を視認可能に構成すれば、必然的に、入射音波の放射域RADの光取込窓#5aに対する最遠端も視認可能となる。
(設計例)
【0183】
図18を参照して、遅延部材#5と被測定物SMPとの間に介在する、中心軸Ax上の気泡BLを視認する場合の設計例について例示する。
【0184】
一例として、遅延部材#5の幅長L=50mmとし、遅延部材#5と被測定物SMPとの境界面に対する光取込窓#5aおよび光取出窓#5bのなす角度α1=30°とし、空気の屈折率Nair=1.0,遅延部材#5の屈折率N1=1.1,被測定物SMPの屈折率N2=2.0とする。
【0185】
たとえば入射光の入射角θin=15.0°とすると、光取込窓#5aで屈折して生じる角度θ1=12.7°となる。そのため、入射光Linが遅延部材#5と被測定物SMPとの境界面に入射する角度θ2=42.7°となる。
【0186】
ここで、遅延部材#5と被測定物SMPとの間に介在する気泡BLの臨界角θc=sin−1(Nair/N1)=65.4°であるので、角度θ2<臨界角θcが成立する。すなわち、遅延部材#5と気泡BLとの境界面に到達した入射光Linは、遅延部材#5を通過して気泡BLへ入射する。
【0187】
再度、図15を参照して、気泡BLに入射した入射光Linは、遅延部材#5と気泡BLとの境界面において屈折して、角度θ3の角度で気泡BL内を伝搬する。このとき、角度θ3=48.2°となる。さらに、入射光Linは、気泡BLと被測定物SMPとの境界面で反射されて観測光Lobを生じる。そして、観測光Lobが気泡BLと遅延部材#5との境界面に最入射する角度θ5=θ3=48.2°となり、観測光Lobが当該境界面から射出される角度θ6=θ2=42.7°となる。
【0188】
再度、図18を参照して、観測光Lobが光取出窓#5bに入射する角度θ7=12.7°であるので、観測光Lobが光取出窓#5bから射出される射出角θout=15.0°が得られる。
【0189】
このように、各角度が有意な値に決定できるので、光取込窓#5aから取込まれる入射光Linが順次伝搬して、光取出窓#5bから射出される経路が形成されることが数学的に示される。
【0190】
さらに、図19を参照して、遅延部材#5と被測定物SMPとの間に介在する、放射域RADの光取込窓#5aに対する最近端の位置に介在する気泡BLを視認する場合の設計例について例示する。なお、遅延部材#5と被測定物SMPとの境界面における放射域RADの直径x=40mmとする。
【0191】
上述したのと同様に、入射光の光取込窓#5aに対する入射角θin=15.0°とすると、光取込窓#5aで屈折して生じる角度θ1=12.7°となり、入射光Linが遅延部材#5と被測定物SMPとの境界面に入射する角度θ2=42.7°となる。さらに、観測光Lobが光取出窓#5bに入射する角度θ3=48.2°となり、以下同様であるので、観測光Lobが光取出窓#5bから射出される射出角θout=15.0°が得られる。
【0192】
ここで、入射光Linが入射する入射位置Hin=27.1mmとなる。そのため、光取込窓#5aおよび光取出窓#5bは、それぞれの高さが遅延部材#5と被測定物SMPとの境界面から27.1mmを確保できるように形成することで、放射域RADのいずれの点に対しても、視認することができる。
【0193】
この発明の実施の形態5によれば、部材外部から入射光波を取込んで遅延部材と被測定物との接合部に向けて伝搬させるための光取込窓と、入射光が接合部で反射されて生じる観測光を部材外部へ取出すための光取出窓とが形成された遅延部材が用いられる。さらに、光取込窓は、遅延部材と被測定物との境界に気泡などの介在物が存在する場合には、当該気泡に入射した後に、当該気泡と被測定物との境界で反射されて観測光を生成するように、入射光を接合部へ導く。これにより、介在物が存在する領域で生成された観測光は、気泡自体の映像情報を含むようになる。したがって、介在物が存在するか否かに応じて、観測光には有意な差異が生じるため、音波センサと被測定物との接触状態を視認できる。
【0194】
また、この発明の実施の形態5に係る光取込窓および光取出窓は、上述のこの発明の実施の形態1に比較して、遅延部材と被測定物との境界面に対する角度がより小さくなるように形成される。これにより、入射光および観測光の伝搬方向が遅延部材と被測定物との境界面に対してより垂直方向になるので、より容易な視認を実現できる。
[実施の形態6]
【0195】
この発明の実施の形態5では、2つの円錐台形が接合された形状を有する遅延部材において、光取込窓によって取込まれた入射光が遅延部材を通過して介在物に入射する構成について例示した。一方、この発明の実施の形態6においては、円錐台形状の遅延部材を用いる構成について説明する。
【0196】
この発明の実施の形態6に従う粘弾性測定装置は、音波センサの遅延部材における各設計値を除いて、図8に示すこの発明の実施の形態3に従う粘弾性測定装置と同様であるので、詳細な説明は繰返さない。
図20は、この発明の実施の形態6に従う音波センサの断面図である。
【0197】
図20を参照して、この発明の実施の形態6に従う音波センサは、同一の中心軸Ax上に配置される遅延部材#6、トランスデューサ3および送受信回路2からなる。そして、遅延部材#6の錐面およびトランスデューサ3との接合面を除く上面に、光取込窓#6aおよび光取出窓#6bが形成される。
【0198】
より詳細には、光取込窓#6aは、入射光が遅延部材#6と気泡BLとの境界に到達すると、遅延部材#6を通過して気泡BLへ入射した後、気泡BLと被測定物SMPとの境界で反射されるように、入射光を遅延部材#6と被測定物SMPとの接合部へ導く。すなわち、光取込窓#6aは、遅延部材#6と被測定物SMPとの境界面に対する入射光の入射角が、遅延部材#6の屈折率と気泡BLの屈折率とに応じて定まる臨界角より小さくなるように、入射光Linを当該接合部へ導く。これにより、気泡BLの有無に応じて、観測光Lobには有意な差異が生じるため、遅延部材#6と被測定物SMPとの接触状態を視認できる。
【0199】
なお、この発明の実施の形態6においては、入射光Linおよび観測光Lobの経路に応じて、光取込窓#6aおよび光取出窓#6bの機能を果たす領域がそれぞれ定まるため、光取込窓#6aおよび光取出窓#6bを予め明確に区別して形成する必要はない。
【0200】
光取込窓#6aおよび光取出窓#6bの形成方法などは、上述したこの発明の実施の形態1と同様であるので、詳細な説明は繰返さない。また、遅延部材#6の内部媒質などについても、上述の遅延部材4と同様であるので、詳細な説明は繰返さない。
【0201】
この発明の実施の形態6に従う光取込窓#6aおよび光取出窓#6bは、上述のこの発明の実施の形態5に従う光取込窓#5aおよび光取出窓#5bを被測定物SMPとの境界面方向に延長したものと等価であるので、入射光Linおよび観測光Lobの挙動は、この発明の実施の形態5に従う遅延部材#5における挙動と同様となる。そのため、入射光Linおよび観測光Lobの挙動についての詳細な説明は繰返さない。
【0202】
図21は、図20において入射音波の放射域RADの光取込窓#6aに対する最近端を視認する場合を示した図である。
【0203】
図21を参照して、遅延部材#6と被測定物SMPとの境界面において、トランスデューサ3から放射される入射音波の放射域RADの紙面右端に介在する気泡BLを視認するためには、図20における入射光Linおよび観測光Lobの各角度の関係が成立する必要がある。そのため、光取込窓#6aおよび光取出窓#6bの長さおよび角度などを適切に設計する必要がある。特に、光取込窓#6aに入射光Linが入射する入射位置Hin、および光取出窓#6bから観測光Lobが射出する射出位置Houtを適切に設計する必要がある。
【0204】
なお、この発明の実施の形態6に従う遅延部材#6は、中心軸Axを対称にして配置されるので、入射音波の放射域RADの光取込窓#6aに対する最近端を視認可能に構成することで、入射音波の放射域RADの光取込窓#6aに対する最遠端を視認可能となる。
(設計例)
【0205】
図20を参照して、遅延部材#6と被測定物SMPとの間に介在する、中心軸Ax上の気泡BLを視認する場合の設計例について例示する。
【0206】
一例として、遅延部材#6の幅長L=50mmとし、遅延部材#6と被測定物SMPとの境界面に対する光取込窓#6aおよび光取出窓#6bのなす角度α1=30°とし、空気の屈折率Nair=1.0,遅延部材#6の屈折率N1=1.1,被測定物SMPの屈折率N2=2.0とする。
【0207】
たとえば入射光の入射角θin=15.0°とすると、光取込窓#6aで屈折して生じる角度θ1=12.7°となる。そのため、入射光Linが遅延部材#6と被測定物SMPとの境界面に入射する角度θ2=42.7°となる。
【0208】
ここで、遅延部材#6と被測定物SMPとの間に介在する気泡BLの臨界角θc=sin−1(Nair/N1)=65.4°であるので、角度θ2<臨界角θcが成立する。すなわち、遅延部材#6と気泡BLとの境界面に到達した入射光Linは、遅延部材#6を通過して気泡BLへ入射する。
【0209】
再度、図15を参照して、気泡BLに入射した入射光Linは、遅延部材#6と気泡BLとの境界面において屈折して、角度θ3の角度で気泡BL内を伝搬する。このとき、角度θ3=48.2°となる。さらに、入射光Linは、気泡BLと被測定物SMPとの境界面で反射されて観測光Lobを生じる。そして、観測光Lobが気泡BLと遅延部材#6との境界面に最入射する角度θ5=θ3=48.2°となり、観測光Lobが当該境界面から射出される角度θ6=θ2=42.7°となる。
【0210】
再度、図20を参照して、観測光Lobが光取出窓#6bに入射する角度θ7=12.7°であるので、観測光Lobが光取出窓#6bから射出される射出角θout=15.0°が得られる。
【0211】
このように、各角度が有意な値に決定できるので、光取込窓#6aから取込まれる入射光Linが順次伝搬して、光取出窓#6bから射出される経路が形成されることが数学的に示される。
【0212】
この発明の実施の形態6によれば、部材外部から入射光波を取込んで遅延部材と被測定物との接合部に向けて伝搬させるための光取込窓と、入射光が接合部で反射されて生じる観測光を部材外部へ取出すための光取出窓とが形成された遅延部材が用いられる。さらに、光取込窓は、遅延部材と被測定物との境界に気泡などの介在物が存在する場合には、当該気泡に入射した後に、当該気泡と被測定物との境界で反射されて観測光を生成するように、入射光を接合部へ導く。これにより、介在物が存在する領域で生成された観測光は、気泡自体の映像情報を含むようになる。したがって、介在物が存在するか否かに応じて、観測光には有意な差異が生じるため、音波センサと被測定物との接触状態を視認できる。
【0213】
また、この発明の実施の形態6に係る遅延部材は、より広い断面積をもつ面で被測定物と密着するように構成されるので、粘弾性特性の測定対象領域が比較的広い場合であっても、確実に音波センサと被測定物との接触状態を視認できる。
[実施の形態7]
【0214】
この発明の実施の形態3および6では、台形の縦断面を有する円錐台形からなる遅延部材を用いる構成について例示したが、同様に台形の縦断面を有する四角錐台形からなる遅延部材を用いる構成について説明する。
【0215】
この発明の実施の形態7に従う粘弾性測定装置は、音波センサの遅延部材の形状を除いて、上述のこの発明の実施の形態1に従う粘弾性測定装置100と同様であるので、詳細な説明は繰返さない。
図22は、この発明の実施の形態7に従う音波センサ104の外観図である。
【0216】
図22を参照して、音波センサ104は、四角錐台形の遅延部材7と、その上部に接合された円柱形状のトランスデューサ3と、さらにその上部に配置された送受信回路2とから構成される。
【0217】
遅延部材7は、より広い面積をもつ横断面を底面側に配置した四角錐台形により構成され、その錐面およびトランスデューサ3との接合面を除く上面に、光取込窓7aおよび光取出窓7bが形成される。光取込窓7aおよび光取出窓7bの形成方法などは、上述したこの発明の実施の形態1と同様であるので、詳細な説明は繰返さない。また、遅延部材7の内部媒質などについても、上述の遅延部材4と同様であるので、詳細な説明は繰返さない。
【0218】
入射光および観測光の挙動などについては、上述のこの発明の実施の形態3または6と同様であるので、詳細な説明は繰返さない。
【0219】
さらに、四角錐台形からなる遅延部材に代えて、同様に台形の縦断面を有するn角錐台形(但し、nは6以上の偶数)の遅延部材を用いてもよい。
【0220】
この発明の実施の形態7によれば、上述のこの発明の実施の形態3または6における効果に加えて、錐面に光取込窓および光取出窓を形成できるので、光取込窓および光取出窓が平面状に形成できる。これにより、光取込窓および光取出窓における入射光および観測光に生じる歪みを抑制できるので、より鮮明に音波センサと被測定物との接触状態を視認できる。
[実施の形態8]
【0221】
この発明の実施の形態1〜6では、垂直軸を中心として対称な形状を有する遅延部材を用いる構成について例示したが、この発明の実施の形態8においては、水平軸を中心として対称な形状を有する遅延部材を用いる構成について説明する。
【0222】
この発明の実施の形態8に従う粘弾性測定装置は、音波センサの形状を除いて、上述のこの発明の実施の形態1に従う粘弾性測定装置100と同様であるので、詳細な説明は繰返さない。
図23は、この発明の実施の形態8に従う音波センサ105の外観図である。
【0223】
図23を参照して、音波センサ105は、いわゆる「かまぼこ」形状の遅延部材8と、その上部に接合された送受信回路#2およびトランスデューサ#3を含む部材とにより構成される。
【0224】
遅延部材8は、その垂直断面が半楕円形である略楕円柱状に構成され、その上部表面に光取込窓8aおよび光取出窓8bが形成される。なお、遅延部材8の底面は、被測定物SMPと接合可能なように平面状に形成される。
【0225】
送受信回路#2およびトランスデューサ#3は、遅延部材8の表面曲率と一致するような外形にパッケージされて、遅延部材8と接合される。
図24は、図23のXXIV−XXIV線断面図である。
【0226】
図24を参照して、この発明の実施の形態8に従う遅延部材8は、上部表面の一方側から入射光Linを取込むとともに、生成された観測光Lobを上部表面の他方側から取出して、部材外部へ出力する。
【0227】
上述のこの発明の実施の形態1〜3において説明したように、遅延部材8と被測定物SMPとの境界面で入射光Linが反射されて生成された観測光Lob、および、上述のこの発明の実施の形態4〜6において説明したように、入射光Linが遅延部材8を通過した後に被測定物SMPで反射されて生成された観測光Lobのいずれについても視認することができる。
【0228】
さらには、視認対象とする観測光Lobに応じて、遅延部材8の垂直断面の曲率などを適切に設計することが望ましい。
【0229】
なお、入射光Linおよび観測光Lobの挙動などについては、上述のこの発明の実施の形態1〜6のいずれかと同様であるので、詳細な説明は繰返さない。
【0230】
この発明の実施の形態8によれば、上述のこの発明の実施の形態1〜6のいずれかにおける効果に加えて、上部表面のほぼ全面に光取込窓および光取出窓を形成できるので、光取込窓および光取出窓の面積をより大きくすることができる。これにより、入射光の取込量を増大させて遅延部材と被測定物との境界に入射する光量を確保できるとともに、音波センサと被測定物との接触状態をより詳細に視認できる。
[実施の形態9]
【0231】
上述したように、この発明に係る音波センサは、音波センサと被測定物との接触状態を視認可能とすることを目的とするが、音波センサと被測定物とのすべての接触面に対して、入射音波が放射されるとは限らない。すなわち、音波センサと被測定物との接触状態を視認する対象領域を入射音波の放射域にすれば十分である。
【0232】
一方で、トランスデューサから放射される入射音波は視認することができない。そのため、入射音波の放射域を視認できれば、より作業効率を向上させることが可能となる。
図25は、この発明の実施の形態9に従う音波センサ101Aの断面図である。
【0233】
図25を参照して、この発明の実施の形態9に従う音波センサ101Aは、図5に示すこの発明の実施の形態1に従う音波センサ101において、トランスデューサ3を同心円状のトランスデューサ3Aに代えるとともに、トランスデューサ3Aの中心部に表示光発光部9を設けたものである。
【0234】
表示光発光部9は、一例として、レーザダイオードなどで構成され、トランスデューサ3Aから放射される入射音波の放射域RADに対応するように、遅延部材4の上部から底面に向けて、表示光MLを放射する。すなわち、表示光発光部9は、遅延部材4を通過した入射音波が被測定物SMPに入射する領域を表示するために、表示光MLを放射する。すると、遅延部材4と被測定物SMPとの境界面上では、放射された表示光MLの照射によって、周囲より輝度の高い領域が示される。
【0235】
その他の構成については、この発明の実施の形態1に従う音波センサ101と同様であるので、詳細な説明は繰返さない。
【0236】
なお、図25に示すように、表示光発光部9を同心円状のトランスデューサ3Aの中心部に配置する構成に代えて、トランスデューサの外周に発光源を配置するような構成を採用してもよい。
【0237】
また、図25ではこの発明の実施の形態1に従う音波センサに表示光発光部9を設けた構成を示したが、上述のいずれの音波センサに対しても、同様に表示光発光部9を設けることができる。
【0238】
この発明の実施の形態9によれば、音波センサと被測定物との境界のうち、接触状態を視認すべき領域を予め視認できるので、接触状態の視認作業をより効率的に行なうことができる。
[実施の形態10]
【0239】
上述のこの発明の実施の形態1〜9では、光取込窓の周囲に存在するさまざまな方向の光のうち、視認に適した方向の光が取込まれる構成について説明したが、光取込窓に対して、積極的に入射光を与えるように構成してもよい。
【0240】
図26は、この発明の実施の形態10に従う音波センサ102Aの概略構成図である。
【0241】
図26を参照して、この発明の実施の形態10に従う音波センサ102Aは、一例として、図9に示すこの発明の実施の形態2に従う音波センサ102に対して、光源40と、固定腕42と、可動腕44と、駆動装置46と、受光部48と、解析装置50とをさらに設けたものである。
【0242】
光源40は、一例として、可視光ランプや赤外線ランプなどで構成され、受光部48における受光感度の高い波長領域を含む入射光を生成する。すなわち、光源40は、光取込窓5aに近接して配置され、入射光を生成して、光取込窓5aへ与える。
【0243】
固定腕42は、その一端がリンク機構を介して可動腕44と連結されるとともに、その他端が図示しない架台に連結される。そして、固定腕42は、可動腕44に所定の変位を与えるための基準として機能する。
【0244】
可動腕44は、その一端が光源40と連結されるとともに、その他端がリンク機構を介して固定腕42と連結される。
【0245】
駆動装置46は、一例としてモータなどのドライブ機構からなり、固定腕42に対する可動腕44の角度を可変させる。すなわち、駆動装置46は、光源40で生成される入射光が光取込窓5aに入射する入射角θinを可変に構成される。この構成により、遅延部材5と被測定物SMPとの境界面において視認すべき領域に応じた入射光を、光取込窓5aに対して与えることができる。
【0246】
これらの構成により、光取込窓5aの周囲が暗い場合であっても、音波センサと被測定物との接触状態をより確実に視認できる。
【0247】
さらに、受光部48は、一例としてCCDといった撮像素子などで構成され、光取出窓5bによって取出される観測光を受光して、その受光結果を解析装置50へ出力する。すなわち、受光部48は、光取出窓5bに近接して配置され、光取出窓5bから取出された観測光を受光し、受光した観測光に含まれる映像情報を解析装置50へ出力する。
【0248】
解析装置50は、受光部48から出力される映像情報を取得し、音波センサと被測定物との接触状態の良否を判断して、その判断結果を外部へ出力する。解析装置50は、一例として、画像処理装置であり、受光部48を介して取得される映像情報における濃淡や輝度に基づいて、接触状態の良否(たとえば、気泡BLの有無)を判断する。なお、画像処理装置の処理内容については、さまざまな周知の技術を用いることができる。
【0249】
これらの構成により、可視光領域ではなく、赤外線領域の入射光を用いることもできるので、周囲からの光波の影響を抑制して、より安定した視認が可能となる。
【0250】
なお、光源40と、受光部48および解析装置50とは、必ずしも同時に設ける必要はなく、いずれか一方だけを配置するようにしてもよい。
【0251】
この発明の実施の形態10によれば、光取込窓の周囲が暗い場合であっても、入射光の光量を確保できるので、音波センサと被測定物との接触状態をより確実に視認できる。
【0252】
また、この発明の実施の形態10によれば、画像処理装置によって音波センサと被測定物との接触状態の良否判断を所定の規則に従って行なうことができるので、人間による視認(目視)の場合のように主観的な判断に影響されることなく、判断基準を標準化することができる。これにより、接触状態を所定のレベルに維持して、測定精度のバラツキなどを抑制できる。
【0253】
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した説明ではなく、特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【図面の簡単な説明】
【0254】
【図1】この発明の実施の形態1に従う音波センサを備える粘弾性測定装置の概略構成図である。
【図2】粘弾性測定装置の構成をより詳細に示す図である。
【図3】表面反射法を説明するための図である。
【図4】この発明の実施の形態1に従う音波センサの外観を示す概略図である。
【図5】図4のX−X線断面図である。
【図6】図5において入射音波の放射域の光取込窓に対する最近端を視認する場合を示した図である。
【図7】図5において入射音波の放射域の光取込窓に対する最遠端を視認する場合を示した図である。
【図8】この発明の実施の形態2に従う音波センサの外観を示す概略図である。
【図9】図8のIX−IX線断面図である。
【図10】図9において入射音波の放射域の光取込窓に対する最近端を視認する場合を示した図である。
【図11】この発明の実施の形態3に従う音波センサの外観を示す概略図である。
【図12】図11のXII−XII線断面図である。
【図13】図12において入射音波の放射域の光取込窓に対する最近端を視認する場合を示した図である。
【図14】この発明の実施の形態4に従う音波センサの断面図である。
【図15】遅延部材と気泡との境界における光波の挙動を説明するための図である。
【図16】図15において入射音波の放射域の光取込窓に対する最近端を視認する場合を示した図である。
【図17】図15において入射音波の放射域の光取込窓に対する最遠端を視認する場合を示した図である。
【図18】この発明の実施の形態5に従う音波センサの断面図である。
【図19】図18において入射音波の放射域の光取込窓に対する最近端を視認する場合を示した図である。
【図20】この発明の実施の形態6に従う音波センサの断面図である。
【図21】図20において入射音波の放射域の光取込窓に対する最近端を視認する場合を示した図である。
【図22】この発明の実施の形態7に従う音波センサの外観図である。
【図23】この発明の実施の形態8に従う音波センサの外観図である。
【図24】図23のXXIV−XXIV線断面図である。
【図25】この発明の実施の形態9に従う音波センサの断面図である。
【図26】この発明の実施の形態10に従う音波センサの概略構成図である。
【符号の説明】
【0255】
1 制御装置、2,#2 送受信回路、3,3A,#3 トランスデューサ、4,5,6,7,8,#4,#5,#6 遅延部材、4a,5a,6a,7a,8a,#4a,#5a,#6a 光取込窓、4b,5b,6b,7b,8b,#4b,#5b,#6b 光取出窓、4c 内部媒質、9 表示光発光部、10 演算部、12 時間データメモリ部、14 記憶部、16 表示出力部、18 入力部、20 送信制御回路、22 送信回路、24 方向整合器、26 受信回路、28 信号処理回路、40 光源、42 固定腕、44 可動腕、46 駆動装置、48 受光部、50 解析装置、100 粘弾性測定装置、101,101A,102,102A,103,104,105 音波センサ、Ax 中心軸、BL 気泡、Hin 入射位置、Hout 射出位置、L’ 貯蔵弾性率、L” 損失弾性率、Lin 入射光、Lob 観測光、ML 表示光、N1,N2,Nair 屈折率、RAD 放射域、SMP 被測定物、tanδ 損失正接、θc 臨界角、θin 入射角、θout 射出角。
【特許請求の範囲】
【請求項1】
被測定物に対して第1の音波を放射するとともに、前記被測定物で反射されて生じる第2の音波に応じた検出信号を外部出力するように構成された音波センサであって、
前記音波センサは、電気信号の入力に応答して前記第1の音波を発生するとともに、前記第2の音波の入力に応答して電気信号を発生する電気音波変換部と、
前記電気音波変換部と前記被測定物との間に介挿され、前記第1および第2の音波に対して伝搬遅延を生じさせるための遅延部材とを備え、
前記遅延部材は、
光波を伝搬可能な媒質で構成されるとともに、
部材外部からの第1の光波を取込んで、当該第1の光波を前記遅延部材と前記被測定物との接合部に向けて伝搬させるための光取込窓と、
前記第1の光波が前記接合部で反射されて生じる第2の光波を部材外部へ取出すための光取出窓とが形成され、
前記光取込窓は、前記遅延部材と前記被測定物との間に介在し得る介在物に応じて、生成される前記第2の光波が変化するように、前記第1の光波を前記接合部へ導く、音波センサ。
【請求項2】
前記光取込窓は、前記第1の光波が前記遅延部材と前記介在物との境界に到達すると、前記遅延部材の内部に維持されたまま反射される一方、前記第1の光波が前記遅延部材と前記被測定物との境界に到達すると、前記遅延部材を通過して前記被測定物へ入射するように、前記第1の光波を前記接合部へ導く、請求項1に記載の音波センサ。
【請求項3】
前記光取込窓は、前記遅延部材と前記被測定物との境界面に対する前記第1の光波の入射角が、前記遅延部材の屈折率と前記介在物の屈折率とに応じて定まる臨界角以上となるように、前記第1の光波を前記接合部へ導く、請求項1に記載の音波センサ。
【請求項4】
前記光取込窓は、前記第1の光波が前記遅延部材と前記介在物との境界に到達すると、前記遅延部材を通過して前記介在物へ入射した後、前記介在物と前記被測定物との境界で反射されるように、前記第1の光波を前記接合部へ導く、請求項1に記載の音波センサ。
【請求項5】
前記光取込窓は、前記遅延部材と前記被測定物との境界面に対する前記第1の光波の入射角が、前記遅延部材の屈折率と前記介在物の屈折率とに応じて定まる臨界角より小さくなるように、前記第1の光波を前記接合部へ導く、請求項1に記載の音波センサ。
【請求項6】
前記光取込窓は、前記遅延部材と前記被測定物との境界面内の前記第1の音波が入射する領域に含まれる各点において、前記介在物に応じた前記第2の光波を生成するための前記第1の光波を取込み可能に構成され、
前記光取出窓は、前記第1の音波が入射する前記領域に含まれる各々の点において生成される前記第2の光波をいずれも取出し可能に構成される、請求項2〜5のいずれか1項に記載の音波センサ。
【請求項7】
前記遅延部材の屈折率は、前記被測定物の屈折率に比較して小さい、請求項1〜6のいずれか1項に記載の音波センサ。
【請求項8】
前記音波センサは、前記遅延部材を通過した前記第1の音波が前記被測定物に入射する領域を表示するための表示光を発生する表示光発生部をさらに備える、請求項1〜7のいずれか1項に記載の音波センサ。
【請求項9】
前記音波センサは、前記光取込窓に近接して配置され、前記第1の光波を生成して前記光取込窓へ与えるための光源部をさらに備える、請求項1〜8のいずれか1項に記載の音波センサ。
【請求項10】
前記音波センサは、
前記光取出窓に近接して配置され、前記光取出窓から取出された前記第2の光波を受光して、受光した前記第2の光波に含まれる映像情報を出力するためのカメラ部と、
前記カメラ部からの前記映像情報に基づいて、前記接合部における前記遅延部材および前記被測定物の少なくとも一方の状態を判断するための解析装置とをさらに備える、請求項1〜9のいずれか1項に記載の音波センサ。
【請求項11】
請求項1〜10のいずれか1項に記載の音波センサと、
前記音波センサから出力される前記検出信号と、予め定められた基準音波に基づく基準値との比較により、前記被測定物の粘弾性特性を取得するための制御装置とを備える、粘弾性測定装置。
【請求項1】
被測定物に対して第1の音波を放射するとともに、前記被測定物で反射されて生じる第2の音波に応じた検出信号を外部出力するように構成された音波センサであって、
前記音波センサは、電気信号の入力に応答して前記第1の音波を発生するとともに、前記第2の音波の入力に応答して電気信号を発生する電気音波変換部と、
前記電気音波変換部と前記被測定物との間に介挿され、前記第1および第2の音波に対して伝搬遅延を生じさせるための遅延部材とを備え、
前記遅延部材は、
光波を伝搬可能な媒質で構成されるとともに、
部材外部からの第1の光波を取込んで、当該第1の光波を前記遅延部材と前記被測定物との接合部に向けて伝搬させるための光取込窓と、
前記第1の光波が前記接合部で反射されて生じる第2の光波を部材外部へ取出すための光取出窓とが形成され、
前記光取込窓は、前記遅延部材と前記被測定物との間に介在し得る介在物に応じて、生成される前記第2の光波が変化するように、前記第1の光波を前記接合部へ導く、音波センサ。
【請求項2】
前記光取込窓は、前記第1の光波が前記遅延部材と前記介在物との境界に到達すると、前記遅延部材の内部に維持されたまま反射される一方、前記第1の光波が前記遅延部材と前記被測定物との境界に到達すると、前記遅延部材を通過して前記被測定物へ入射するように、前記第1の光波を前記接合部へ導く、請求項1に記載の音波センサ。
【請求項3】
前記光取込窓は、前記遅延部材と前記被測定物との境界面に対する前記第1の光波の入射角が、前記遅延部材の屈折率と前記介在物の屈折率とに応じて定まる臨界角以上となるように、前記第1の光波を前記接合部へ導く、請求項1に記載の音波センサ。
【請求項4】
前記光取込窓は、前記第1の光波が前記遅延部材と前記介在物との境界に到達すると、前記遅延部材を通過して前記介在物へ入射した後、前記介在物と前記被測定物との境界で反射されるように、前記第1の光波を前記接合部へ導く、請求項1に記載の音波センサ。
【請求項5】
前記光取込窓は、前記遅延部材と前記被測定物との境界面に対する前記第1の光波の入射角が、前記遅延部材の屈折率と前記介在物の屈折率とに応じて定まる臨界角より小さくなるように、前記第1の光波を前記接合部へ導く、請求項1に記載の音波センサ。
【請求項6】
前記光取込窓は、前記遅延部材と前記被測定物との境界面内の前記第1の音波が入射する領域に含まれる各点において、前記介在物に応じた前記第2の光波を生成するための前記第1の光波を取込み可能に構成され、
前記光取出窓は、前記第1の音波が入射する前記領域に含まれる各々の点において生成される前記第2の光波をいずれも取出し可能に構成される、請求項2〜5のいずれか1項に記載の音波センサ。
【請求項7】
前記遅延部材の屈折率は、前記被測定物の屈折率に比較して小さい、請求項1〜6のいずれか1項に記載の音波センサ。
【請求項8】
前記音波センサは、前記遅延部材を通過した前記第1の音波が前記被測定物に入射する領域を表示するための表示光を発生する表示光発生部をさらに備える、請求項1〜7のいずれか1項に記載の音波センサ。
【請求項9】
前記音波センサは、前記光取込窓に近接して配置され、前記第1の光波を生成して前記光取込窓へ与えるための光源部をさらに備える、請求項1〜8のいずれか1項に記載の音波センサ。
【請求項10】
前記音波センサは、
前記光取出窓に近接して配置され、前記光取出窓から取出された前記第2の光波を受光して、受光した前記第2の光波に含まれる映像情報を出力するためのカメラ部と、
前記カメラ部からの前記映像情報に基づいて、前記接合部における前記遅延部材および前記被測定物の少なくとも一方の状態を判断するための解析装置とをさらに備える、請求項1〜9のいずれか1項に記載の音波センサ。
【請求項11】
請求項1〜10のいずれか1項に記載の音波センサと、
前記音波センサから出力される前記検出信号と、予め定められた基準音波に基づく基準値との比較により、前記被測定物の粘弾性特性を取得するための制御装置とを備える、粘弾性測定装置。
【図1】


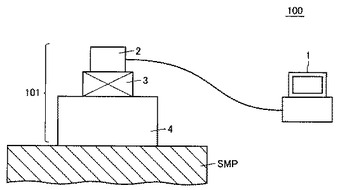
【図2】
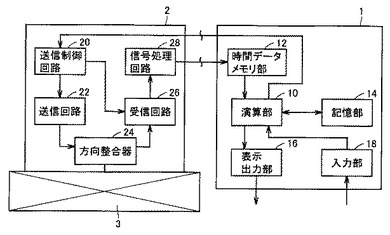
【図3】
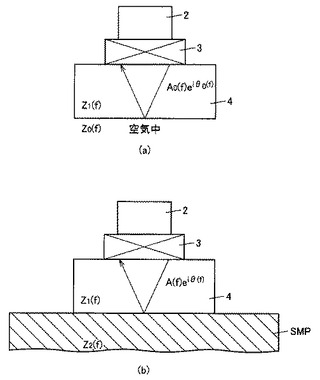
【図4】
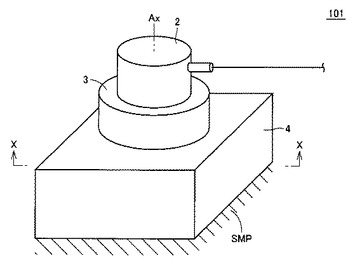
【図5】
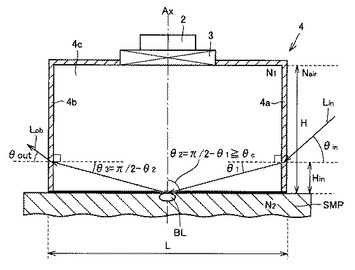
【図6】
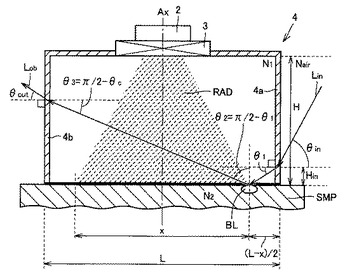
【図7】
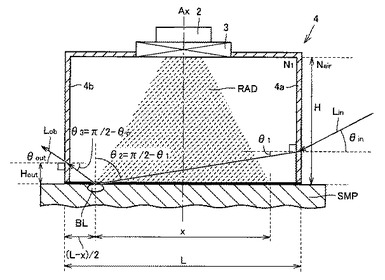
【図8】

【図9】
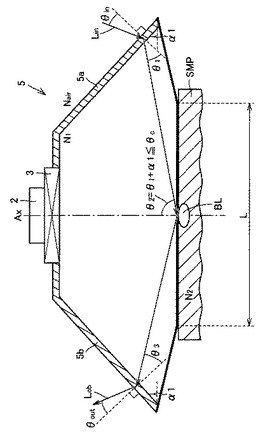
【図10】
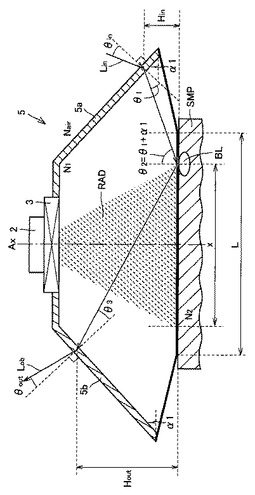
【図11】

【図12】
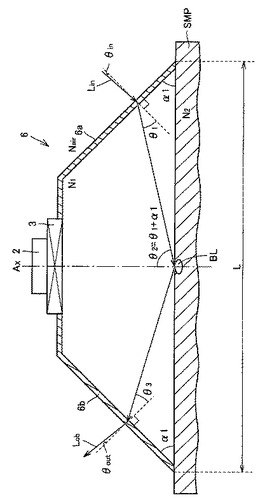
【図13】
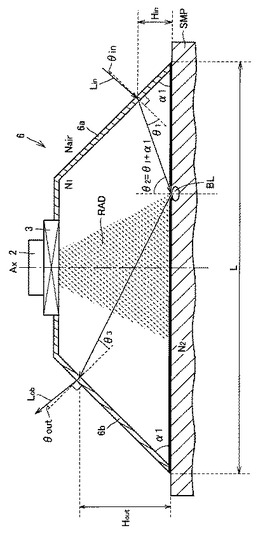
【図14】

【図15】
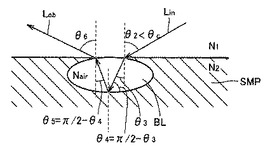
【図16】
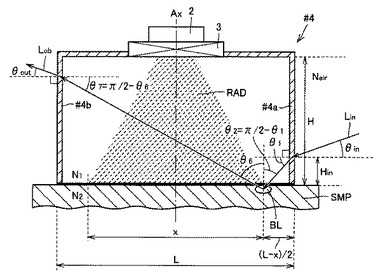
【図17】
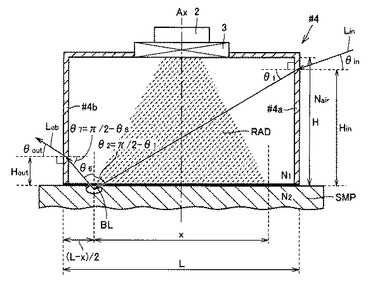
【図18】

【図19】
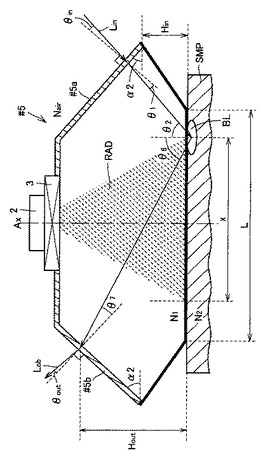
【図20】

【図21】

【図22】

【図23】

【図24】

【図25】

【図26】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【公開番号】特開2008−151576(P2008−151576A)
【公開日】平成20年7月3日(2008.7.3)
【国際特許分類】
【出願番号】特願2006−338389(P2006−338389)
【出願日】平成18年12月15日(2006.12.15)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
【公開日】平成20年7月3日(2008.7.3)
【国際特許分類】
【出願日】平成18年12月15日(2006.12.15)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
[ Back to top ]