
エービービー エービーにより出願された特許
1 - 10 / 11
金属製の物体に設けられた金属層の厚さを測定するための方法および装置
本発明は、金属製の物体(1)上に設けられた金属層(2)の厚さを測定するための方法および装置に関する。金属層は、金属製の物体の抵抗率(ρ2)とは異なる抵抗率(ρ1)を有している。本装置は、金属層の近傍に磁界を生じさせ、金属層の表面に電流が誘導されるように磁界に変動を生じさせるように構成される第1のデバイス(4、7)と、誘導電流が金属層を伝搬するのに要する時間よりも長い期間にわたって、誘導電流に起因する金属層外部の磁界の変化を測定するように構成される第2のデバイス(5、8)と、測定される磁界の変化を受信し、金属層の厚さと磁界の変化の測定値との間の数学的関係にもとづいて、金属層の厚さ(d)を割り出すように構成される演算ユニット(9)とを備える。 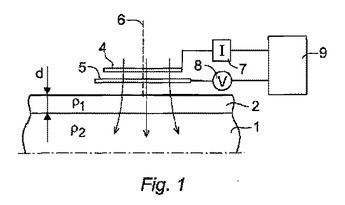 (もっと読む)
(もっと読む)
ロールギャップを制御する方法と装置
本発明は、少なくとも2つのロール(3a−b、4a−b)、及びロールギャップの大きさを個別に制御する少なくとも2つのロールギャップアクチュエータ(6、7)を含む圧延装置でストリップ(1)を圧延するときにロールギャップを制御する方法と装置に関する。本装置は、ストリップの幅方向の板厚プロフィルにおけるくさび形状の傾斜の大きさに関する情報(POSactOS、POSactDS)を受信し、前記板厚プロフィルにおけるくさび形状の傾斜の大きさに関する情報に基づいて、圧延装置の両側でストリップの圧下率がほぼ同じになるように前記アクチュエータを制御する。  (もっと読む)
(もっと読む)
信号を復調する方法及び装置
本発明は、励磁周波数を有する交流励磁信号によって駆動されるトランスデューサ(1)からの出力信号を復調する方法及び装置に関する。このトランスデューサは測定対象の量を含む振幅変調出力信号(y(t))を生成する。本装置は、トランスデューサからの出力信号、及び励磁ユニットからの出力信号をサンプリングするサンプリングユニット(5,6,7)と、計算ユニット(8)とを備え、計算ユニット(8)は、励磁周波数における出力信号の振幅及び位相に関する情報を含む第1の複素数量(Y)を、トランスデューサからの出力信号のサンプリング値に基づいて計算し、励磁周波数における励磁信号の振幅及び位相に関する情報を含む第2の複素数量(U,I)を、励磁信号のサンプリング値に基づいて計算し、前記第1の複素数量と前記第2の複素数量との除算の商として出力される複素数を生成し、復調出力信号(Od)を、出力される前記商に基づいて計算する。  (もっと読む)
(もっと読む)
磁気弾性合金層を含む測定装置及び同合金層の形成方法
本発明は測定装置に関し、測定装置は、荷重支持部材の上に形成される磁気弾性合金層を含み、この合金層は、荷重支持部材に加わる力によって生じる応力を測定するために設けられ、前記層の平均粒子サイズは100nm〜10000nmの範囲であり、そして本発明は更に、合金層の形成方法に関する。  (もっと読む)
(もっと読む)
調整及び制御を行なう方法と装置
本発明は、材料の流速が変化する工業プロセスを調整及び制御する方法と装置に関する。本装置は、コントローラ出力信号(u(t))に励起信号を加算する加算器(10b)と、前記励起信号に応答して前記特性を測定する測定システム(6)と、前記特性の前記測定値(z(t))及びコントローラからの出力信号(u(t))に基づき、材料の流速の変化による影響を表わすプロセスモデル構造の、少なくとも一つのパラメータの値を推定し、前記パラメータの推定値に基づいて、コントローラ出力からコントローラ入力までの動力学を表わすモデルを計算し、且つコントローラ出力からコントローラ入力までの動力学を表わす前記モデルに基づいて、コントローラのモデル型調整を実行する、モデル型調整ユニット(10c)とを備える。  (もっと読む)
(もっと読む)
機械特性を推定する方法及び装置
既知の化学組成を有する金属合金オブジェクトの一つ以上の内部機械特性を、金属合金オブジェクトの抵抗率に基づいて推定する、または監視する装置である。この装置は、金属合金オブジェクトの抵抗率を測定する測定装置(2)と、そして金属合金オブジェクト中の溶解合金化元素の含有量を、金属合金の測定抵抗率及び既知の化学組成に基づいて計算し、そして計算される含有量に基づいて、金属合金オブジェクトの少なくとも一つの内部機械特性を計算する計算ユニット(4)とを備える。 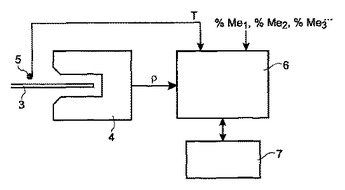 (もっと読む)
(もっと読む)
力測定装置
2つの直交する測定方向(5a、5b)での応力の差を測定するようになっているセンサ(3)を備えている、機械的な力を測定するための装置(1)。この装置は、測定すべき力を受容するようになっている少なくとも1つの力受容部材(2a、2b)を備えており、センサは、力受容部材にかかる力を測定するようになっている。装置は、管形状の変換器(4)をさらに備えており、この変換器(4)は、力を力受容部材からセンサに伝達し、力受容部材によって受容された力をセンサに適する力に変換するようになっている。力受容部材(2a、2b)は、変換器(4)から半径方向に外方に延在するフランジを備えており、力受容部材(2a、2b)及びセンサ(3)は、変換器の長手方向軸線に沿って互いに距離(l)を置いて取り付けられている。  (もっと読む)
(もっと読む)
圧力測定のための装置
ガスの圧力を測定する装置であって、枠構造(10)と、該枠構造を通って延びるチャネルであって、軸線方向に、ガスを受容するための開口部を含む導入区分と、壁部を有する測定区分(B)と、測定中にその端部が閉じられている最終区分とを備えているチャネルと、前記測定区分の壁部に作用する半径方向の力を測定する測定ユニット(11、12)であって、前記測定区分の壁部の第1の部分に機械的に接触する測定体(13、14)を備えている測定ユニットと、前記測定区分の壁部から前記枠構造へと熱を伝達する冷却体(18)とを備えており、該冷却体は、前記測定区分の壁部の第2の部分及び前記枠構造と熱的に接触している。  (もっと読む)
(もっと読む)
ストリップの圧延工程における平坦度制御を最適化するための方法と装置
本発明は、任意の数のミルスタンドとアクチュエータとを用いて、ストリップの圧延工程における平坦度制御を最適化する方法と装置に関する。本発明は、各アクチュエータの平坦度効果の情報を含む、ミルマトリクスが表すミルモデルを使用し、各アクチュエータの平坦度効果を、用いるアクチュエータの数と等しい又は小さい寸法形状の座標システムに変成し、ストリップの全面における実際の平坦度の値をモニタ/サンプル抽出し、モニタ/サンプル抽出したストリップの平坦度と基準の平坦度ベクトルとの間の差として、平坦度誤差/偏差のベクトルを計算し、平坦度誤差を、より小さいパラメータ化した平坦度誤差ベクトルに変換し、パラメータ化した平坦度誤差を最小限にするために、最適化したアクチュエータ設定点を計算する動的コントローラを使用するので、所望のストリップ平坦度を達成する。本発明は、ストリップの圧延工程の平坦度制御を最適化するシステムにも関する。  (もっと読む)
(もっと読む)
センサの温度ドリフトを適応的に補正する方法及びシステム
本発明は、シャフト又はドライブトレインのトルク、又は機械設備の力を作動中に測定するセンサの温度ドリフトを適応的に補正する方法に関する。本発明は、センサ信号を繰り返し測定し、関連する温度を求めるステップ、測定データ及び保存データに基づいて、温度の関数としてオフセット値を計算するステップ、前記計算されたオフセット値を使用して測定された信号値を補正するステップ、センサが無負荷状態又は無負荷に近い状態になる時点を検出し、センサが無負荷状態又は無負荷に近い状態になる場合、センサ信号値及び関連する温度値をメモリに保存し、センサオフセットのモデルを更新するステップを含む。本発明はまた、このようなセンサ信号オフセットの温度ドリフトを適応的に補正するシステム及びコンピュータプログラムに関する。  (もっと読む)
(もっと読む)
1 - 10 / 11
[ Back to top ]