
株式会社フレスコーヴォにより出願された特許
1 - 1 / 1
地盤改良機
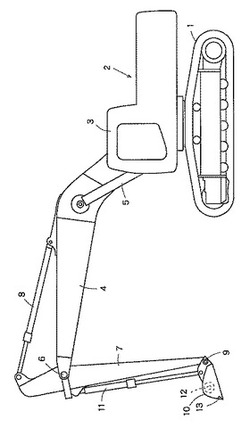
【課題】 混練ローター12及び改良度合い検出器13の位置を三次元でとらえられるようにして、地盤改良の状況を正確に把握できるとともに、基台を含めた機体の幅方向の移動回数を最小限にとどめられるようにする。
【解決手段】
コントローラは、上記支持部材の基端から混練ローター12あるいは改良度合い検出器13のうちの少なくとも一方にいたるまでの長さをあらかじめ記憶し、上記各回転角度センサーSから受信した角度信号に基づいて、上記混練ローターあるいは改良度合い検出器のうちの少なくともいずれか一方の三次元位置を演算し、その演算結果を、上記改良度合い検出器からの地盤情報とともに記憶し、かつ、このコントローラに接続した出力手段に出力させる構成にしている。
(もっと読む)
1 - 1 / 1
[ Back to top ]