
朝日エンジニアリング株式会社により出願された特許
1 - 9 / 9
対象物認識システム及び該システムを利用する監視システム、見守りシステム
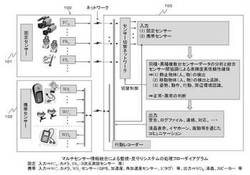
【課題】どのような状況にあっても安定的に高精度な背景を得ることができ、照明変動や遮蔽等の影響を受けても検出に失敗することのない認識システム、監視システム、見守りシステムを提供する。
【解決手段】一定時間内、監視領域及び/又は見守り領域を観測し、得られたデータから対象物領域を抽出し、人の姿勢、動作、動きを認識する手段として人の体を各部分に対応して分割するマルチスリット法及び/又はバウンディングボックスをサブバウンディングボックスに分割するサブバウンディングボックス法を用いて解決する。
(もっと読む)
対象物認識システム及び該システムを利用する監視システム、見守りシステム

【課題】どのような状況にあっても安定的に高精度な背景を得ることができ、照明変動や遮蔽等の影響を受けても検出に失敗することのない認識システム、監視システム、見守りシステムを提供する。
【解決手段】基本的には多数決論理によるが、観測手段により背景を反映する背景パラメータと対象物の存在位置を反映する存在位置パラメータを取得し、背景パラメータが所定の範囲内に所定の閾値以上で存在するかを判定し、存在すればその背景パラメータを背景候補領域を示すパラメータとして設定し、かつ、存在位置パラメータが所定の範囲内に所定の閾値以上で存在するかを判定し、存在すればその存在位置パラメータを対象物候補領域を示すパラメータとして設定する。
(もっと読む)
対象物認識システム及び該システムを利用する監視システム、見守りシステム
【課題】監視領域や見守り領域を観測し、得られたデータから対象物領域を抽出したときに、複数の対象物領域が重なりあう又は近距離に位置することにより1つの対象物領域として統合認識されている場合や部分的なデータ欠落により同一対象物が複数の対象物領域に分離されている場合には、認識が困難になる問題を解決する認識システム、監視システム、見守りシステムを提供する。
【解決手段】抽出された対象物がフレームに出現する出現時刻及び/又は統合前の複数の対象物領域と統合後の対象物領域の領域パラメータの相関度に基づいて、複数の対象物領域を独立した別の対象物領域として分離する手段と、対象物領域がフレームに出現する出現時刻及び/又は分離前の対象物領域と分離後の複数個の対象物領域の領域パラメータの相関度に基づいて、分離された対象物を同一の対象物領域であると認識する領域統合手段を備える。
(もっと読む)
対象物認識システム及び該システムを利用する監視システム、見守りシステム
【課題】セグメンテイション及び位置推定精度の向上を図ることができ、結果として姿勢・動作の認識精度も向上し、より信頼性の高い異常事態発生の検知が可能な対象物の認識システム、監視システム、見守りシステムを提供する。
【解決手段】本発明の対象物の認識システムは、対象物の1次元データを取得する1次元センサーと、対象物の2次元データを取得する2次元センサーと、対象物の3次元データを取得する3次元センサーの少なくとも2つ以上を含む同種又は異種の複数の観測手段と、上記観測手段から得られる1次元データ、2次元データ、3次元データを対応付けて対象物を認識する認識手段を備える。
(もっと読む)
昼夜を問わずに利用可能な頑健性の高い歩行者検出法
【課題】対向車のヘッドライトや直射日光などの高輝度光源の影響による画像劣化を防ぎ、歩行者等の対象物の認識率を高める。
【解決手段】カメラの前方に、光波長選択的帯域通過方式の通過体を設置し、画像劣化を防ぎ歩行者等の対象物の認識率を高め、撮影した画像の消失点から対象物の位置を計算したマルチスリット法の採用し、歩行者であれば頭部、胴体部、脚部の特徴が、交通情報であれば信号、交通標識、看板等の特徴があるかどうかを判定することにより対象物の認識率を高める。
(もっと読む)
グラフにおけるリンク構造を利用したノードの自動クラスタリング
【課題】グラフにおけるリンク構造を利用したノードの自動クラスタリングすることで、既存の検索エンジンにおいては容易にたどり着かない情報へ到達可能にする。
【解決手段】探索のクエリーに対し、グラフにおけるリンク構造を利用したノードの自動クラスタリングを行い、求めようとする情報により近い情報であるクラスタ選択画面を表示し、利用者が必要とするクラスタを選択し、利用者に負荷をかけることなく、既存の検索エンジンにおいては容易にたどり着かない情報に到達する。
(もっと読む)
雑個体(形状や大きさが種々の物体)を対象としたICタグ等取り付け器具、及び雑個体情報を管理するシステム
【課題】 雑個体(形状や大きさが種々の物体)を対象としたICタグ等取付器具により、雑個体にICタグ等を取付け、雑個体廃棄物情報を管理する。
【解決手段】 雑個体(形状や大きさが種々の物体)の形状は不定形であり、図1に示す形状に柔軟に対応した各種取付器具により、ICタグ等が容易に取り付けが出来、簡単には外れず、ICタグ等を電波反射物体から距離を保つ機能を有し、ICタグ等の背面をフェライト等の電波吸収材で覆い、取付忘れ、取り外し忘れなどの防止を目的として、ICタグ等の取付が明示的に示す場合は、視認性のよい色と大きさを持つ取付器具であり、また外す意図を持った時は容易に外すことを満足しようとするものである。
図2に示すシステムのブロック構成図が実施形態の例であり、蛍光X線、γ線線量計など各種測定器の使用を前提とし、その計測データの有効な管理を可能ならしめる。
図3に示すフローチャートのように使用され、ICタグ等の取付、取外しを特徴とする。
(もっと読む)
可視光を用いた照度差の激しい場所での物体検出・認識システム、及びコンピュータプログラム
【課題】可視光を用いた、照度差の激しい場所での物体を、高い精度で検出・認識し、その結果を報知する。
【解決手段】 ビデオカメラ200で撮像された画像データはビデオキャプチャ部104でデジタル画像データに変換され、高輝度部が検出され、遮光マスクパターンが生成される。次に、高輝度部分をマスクすることにより、画質の劣化を防ぎ、以後の画像処理を可能とする画像がビデオカメラ201で撮影される。CPU100は、撮像された画像から画像処理により、外形を検出し、その中の対象物と成り得るオブジェクトの候補を抽出する。全体の画面から検出、切出された対象物を認識することができた場合には、その出力メッセージを、外部AV出力装置300から出力する。3次元的な距離計算は左右画像から対応点、対応 線分、対応領域を見つけることにより行う。
(もっと読む)
オブジェクト認識装置及びその制御方法、並びに、コンピュータプログラム及びコンピュータ可読記憶媒体
【課題】 オブジェクトの撮像時の条件によらず、高い精度で認識し、その結果を報知する。
【解決手段】 ビデオカメラ200で撮像された画像データをビデオキャプチャ部104でデジタル画像データに変換される。CPU100は、撮像された画像からモルフォロジー処理により、外形を検出し、その中の交通標識と成り得るオブジェクトを認識候補して抽出する。そして、その候補中に含まれる色を相対色評価により抽出し、各色を持つパターンを分離し、データベース103内に格納されている2値パターン103bとマッチングを行なう。この結果、マッチするパターンのコードが生成されるので、外形、マッチするパターンコード及び色に合致するものを検索テーブル103aから検索し、一致するものが検索できた場合には、その出力メッセージを、外部AV出力装置300から出力する。
(もっと読む)
1 - 9 / 9
[ Back to top ]