
シンテック株式会社により出願された特許
1 - 2 / 2
搬送補助装置
【課題】作業者の搬送時の負担を軽減すると共に、正確な位置決めをなし得る搬送補助装置を提供する。
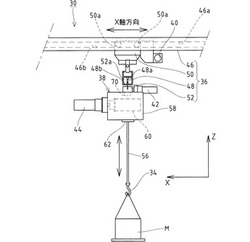
【解決手段】搬送補助装置30は、搬送物Mを吊り下げ保持する懸吊手段38と、操作情報を検知する力覚センサ62と、搬送物Mの荷重を検知する荷重センサ70とを備える。懸吊手段38は、走行手段36を介してX軸,Y軸サーボモータ40,42によりX−Y軸方向へ移動される。また、懸吊手段38は、Z軸サーボモータ44によって搬送物MをZ軸方向へ移動させる。更に、各サーボモータ40,42,44には、夫々エンコーダが設けられる。制御手段は、搬送物Mの荷重に基づいて懸吊手段38が搬送物Mを吊り下げ保持するようZ軸サーボモータ44を制御する。更に、制御手段は、力覚センサ62からの操作情報とエンコーダが出力したパルスとを比較演算して、各サーボモータ40,42,44を、夫々フィードバック制御する。
(もっと読む)
荷役物昇降装置

【課題】 荷役物を保持した懸吊状態では、荷役物保持手段に設けたコントロールスイッチを解放状態としても、荷役物の保持状態が解除されない。
【解決手段】 第1パイロット弁36のパイロットポート36a,36bと第1切換弁38とを連通する管路40の間に第2パイロット弁46を設ける。第2パイロット弁46には、基準パイロット圧と、バランサ16へ供給される流体圧の分岐圧力であるパイロット圧とを常時印加する。第2パイロット弁46へのパイロット圧が基準パイロット圧より小さい場合は、第1パイロット弁36へ流体圧を供給して保持手段22での荷役物32の保持および解除を可能とする。また第2パイロット弁46へのパイロット圧が基準パイロット圧より大きい場合は、第1パイロット弁36への流体圧の供給を停止し、保持手段22が荷役物32の保持を解除できないようにする。
(もっと読む)
1 - 2 / 2
[ Back to top ]