
アトラス・コプコ・ツールス・アクチボラグにより出願された特許
1 - 10 / 48
歯車ケーシング及びパラメータ検知装置を備えた携帯型動力レンチ
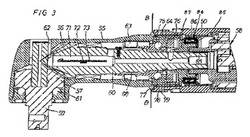
携帯型動力レンチが動作制御ユニットで制御され、そして回転モーターを備えるハウジング(10;50)と、歯車(18;56、57)及び駆動スピンドル(19;60)とを含み、スイベル或いは多位置接続を介して解放可能に及び/又は回転可能にハウジングに接続された歯車ケーシング(15;55)とを有する。駆動スピンドル(19;60)には動作パラメータ検知装置(22、23;68)が組み合わされる。検知装置(22、23;68)は、駆動スピンドル(19;60)と歯車ケーシング(15;55)との間に配置された第一の信号伝達装置(28;82)を介して動作制御ユニットと通信し、第二の信号伝達装置(31;84)が動作制御ユニットと通信する。駆動スピンドル(19;60)と歯車ケーシング(15;55)との間には少なくとも第一の信号伝達装置(28;82)が非接触伝達装置を備えている。
(もっと読む)
超音波測定方法及び装置

本発明によれば、弾性材料の接触層(218)を用いて測定すべき物体(101;217;501)に超音波トランスデューサ(102;230;502)が音響的に連結される超音波測定方法が提供される。トランスデューサ(102;230;502)は、測定される上記物体(101;217;501)に多数の連続した超音波送信信号を送信し、多数の送信信号のそれぞれの送信周波数(f)は前記多数の送信信号のうちの他の送信信号の周波数と区別される。送信信号の信号エコーは受信され、そして受信された信号エコーに基いて、前記物体(101;217;501)の超音波測定用に使用すべき少なくとも1つの送信周波数(f)が選択される。本発明はまた超音波測定装置に関する。 (もっと読む)
一体型電圧発生手段を備えた空気圧式モーターユニット
空気入口通路(11)と排気出口通路(12)と脈動する排気出口流量を発生する種類の回転モーター(13)とを備えたハウジング(10)と、実際のモーターの状態及び/又は動作パラメータ値に応じた信号を通信する電圧依存手段(32)と、前記電圧依存手段(32)に接続された電圧発生手段(34)とを備える空気圧式モーターユニットにおいて、前記電圧発生手段(34)が、排気出口通路(12)に配置され且つモーター(13)からの脈動する排気出口流量の圧力パルスによって作動されるよう構成された圧電要素(35)を備えている。圧電要素(35)は舌状の形状で、一端部で堅固に固定され、中央静止位置に相対する二方向動作で揺動するよう配置され、よって交流電圧を発生させる。
(もっと読む)
手動操作型動力制御手段を備えた携帯動力レンチ
角度型携帯可能動力レンチは、角度駆動ヘッド(12)と後方ハンドル(11)とを備えた細長いハウジング(10)で構成され、モーターを支持している。さらに動力レンチは、後方ハンドル(11)に配置された主動力制御トリガー(16)と角度駆動ヘッド(12)に配置された補助動力制御トリガー(20)とを備えた手動動作の動力制御手段(16、20)を備えている。モーター及び主トリガー(16)並びに補助動力制御トリガー(20)はプログラム可能な制御ユニット(18)に接続され、制御ユニット(18)にはネジ継手緊締開始段階及び最終緊締段階のそれぞれに最適な動作パラメータセットが記憶されている。補助動力制御トリガー(20)は緊締開始パラメータセットのみを作動するよう構成され、一方主動力制御トリガー(16)は最終緊締パラメータセットを作動するよう構成されている。 (もっと読む)
ネジ継手緊締時の不具合を補正するための位置ロック型動力工具の動作方法及び装置
少なくとも1つの緊締パラメータ用の検知手段を備え、許容できない緊締されたネジ継手(13a、13b、13c;23a、23b、23c)或いは対象物(12a、12b、12c;22a、22b、22c)の位置に動力レンチ(15;25)の動作をロックする方法及び装置であって、位置検知システム(15、19、20;35、36、37;24)が、緊締動作中動力レンチ(15;25)の位置を継続的に指示するために設けられ、また制御ユニット(16;26)は、得られ緊締パラメータ値を予定の制限値と比較して、各ネジ継手について制限値を超えたか否かに応じてOK或いはNOK信号を発生する手段と、許容できない緊締ネジ継手が注視されそしてNOK信号が解消されるまで、NOK信号を発生させているネジ継手或いは対象物の位置に動力レンチをロックするロック手段とを備える。
(もっと読む)
固定された締め具の検査工具及び検査方法
本発明に係るネジ締め具検査方法は、取付トルク(T)及び回転角当たりの実際のトルク成長(dT/dφ)特性に関する締め付け済みのネジ締め具の状態を検証するためのネジ締め具検査方法において、試験回転間隔(Δφ)で締め具に増し締めトルクを加え、前記試験回転間隔(Δφ)の間のトルクの大きさ(T)を測定し、前記試験回転間隔(Δφ)の間の占め具の回転運動(φ)を測定し、前記試験回転間隔(Δφ)に対する回転角当たりのトルク成長(dT/dφ)を演算し、前記試験回転間隔(Δφ)の間の演算した回転角当たりのトルク成長(dT/dφ)及びトルクの大きさ(T)を、所望の目標トルクレベルまで締め付けられた時の実際の締め具の特性をそれぞれ表す所定の基準値(Tstart,KR)又は(TE,KP)と比較し、前記基準値(Tstart,KR)又は(TE,KP)を考慮して締め具の状態を承認又は非承認することを特徴とする。 (もっと読む)
動作制御手段を備えた空気圧式衝撃レンチ
ネジ継手緊締用空気圧式衝撃レンチは、加圧空気入口通路(28)を備えたハウジング(10)と、排気出口通路(29)と、回転モーターと、空気圧式衝撃発生器と、さらに空気供給導管(17)用接続部と、衝撃レンチを据置型のプログラム可能な制御装置(25)に接続する電線(20)とを有して成る。また衝撃レンチは、制御装置(25)に接続されレンチの出力トルクに応答するフィードバック電気信号用トルク指示手段を備えている。トルク指示手段は、空気入口通路(28)に配置された入口弁(30)を電磁的に始動させ且つモーターからの排気流量を制御する排気弁(22)を電磁的に始動させる。排気弁(22)は、直線的に動作する電磁アクチュエータ(36)で始動され、排気流量及び従ってトルク指示手段からのフィードバック信号に反応してプログラム化された緊締戦略に応じて緊締される実際のネジ継手の特徴に連続的に適用するよう配置された比例弁である。 (もっと読む)
ジョイントの締め付け方法及び装置
本発明は、締め具締め付け用電気組立装置(200)に関し、前記装置(200)は、ハウジング(210)、出力軸(214)に駆動接続される回転モータ(215)、及び前記ハウジング(210)の外まで伸び、かつ、締め付けの間に前記締め具を取り外し可能に連結する連結手段を支持するように構成された前方部分(217)を有する前記出力軸(214)を備え、第一軸線(A1)に沿って前記締め付けが実行されるように構成されている。前記装置(200)は、締め具の締め付け中に前記第一軸線(A1)に対するハウジング(210)の角変位(α,β)を測定する手段と、ハウジング(210)の前記測定された角変位(α,β)を使用して締め付け中に前記モータの回転を制御する手段(220)を備えている。 (もっと読む)
ガス駆動式回転モータ、ガス駆動式回転モータが設けられた工具及びガス駆動式回転モータの回転速度調整方法
本発明は、ガス駆動式回転モータ、ガス駆動式回転モータが設けられた工具及びガス駆動式回転モータの回転速度を調整する方法に関する。ガス駆動式回転モータは、ハウジング(2)、ロータ(3)及びロータ(3)を支持しハウジング(2)に支持された第一ベアリング(5,25)及び第二ベアリング(6)でジャーナル軸受されるロータ軸(7,8)を有するガス駆動式回転部材(1)及び回転部材(1)の回転速度に応じて圧力ガス流入量を制御する調速機(4)を備えている。前記第一ベアリング(5,25)は、一組の回転要素(12;32)、ハウジング(2)に配置されたアウターレース(9;29)及び回転部材(1)の軸の一部(7)に配置されたインナーレース(19;30)を有し、前記一組の回転要素(12;32)は、それらの上で回転要素が転動する前記レース(9,10;29,30)に接触する。モータは、さらに、調速機(4)を第一ベアリング(5,25)の回転要素(12,32)に連結するように設けられた連結装置(15;35)を有し、それにより、回転要素(12,32)からの回転運動を調速機(4)に伝達する。 (もっと読む)
動力工具及び動力工具の使用方法
本発明は回転子(8)及び固定子(10)を包含する電気モーター(6)、回転可能な固定要素緊締中トルク値を計測するトルク検知装置(16)、動力工具と一体化或いは通信する動作制御装置(18)を備える動力工具(2、30,32)に関わるものである。 動力工具(2、30,32)は、回転子(8)の回転を阻止する手段(26、28)を備えている。また本発明は動力工具の使用によって回転可能な固定要素を緊締する方法にも関わる。 (もっと読む)
1 - 10 / 48
[ Back to top ]