
ザ ティムケン カンパニーにより出願された特許
1 - 8 / 8
軸方向磁束モータアセンブリ
電源ユニットアセンブリ(200)は、共通の回転軸線を有する一対の鏡面対称の軸方向磁束モータ(10)を備え、それぞれの軸方向磁束モータ(10)はロータシャフト(44)に配置されたロータ(60)と、前記ロータ(60)に動作可能に配置された少なくとも1つのステータ(62)と、を含んでいる。共通の端板(202)は、前記一対の軸方向磁束モータ(10)の各々の間に配置されて共通の取付装置機構を提供し、一方、出力ハブ(16)は鏡面対称の一対の軸方向磁束モータ(10)の各ロータシャフト(44)に動作可能に連結される。前記鏡面対称の一対の軸方向磁束モータ(10)の各々は、各関連出力ハブ(16)に単独の速度及びトルクを提供するように動作可能に構成されている。  (もっと読む)
(もっと読む)
トルク誘導機能を備えた差動装置

【課題】目的はトルク誘導機能を備えた差動装置を提供することである。
【解決手段】軸周りを回転する左右アクセルシャフトに選択的にトルクを誘導する差動装置は、それに適用されるトルクにより軸周りを回転するケージを含む。ケージは、アクセルシャフト間の角速度の変化を調整しながらトルクをアクセルシャフトに伝達する伝達装置を収容する。さらに、差動装置は左右アクセルシャフト用に左右トルクダイバータを有し、各トルクダイバータはプラネタリセットを含む。プラネタリセットは、ケージと、アクセルシャフトと、反作用トルクをプラネタリセットに及ぼすブレーキとの間を接続し、プラネタリセットがケージからプラネタリセットを介してアクセルシャフトにトルクを伝達できるようにする。好適には磁性粒子ブレーキであるブレーキは、アクセルシャフトに伝達されるトルクを制御し、差動装置がケージに適用されるトルクを誘導できるようにする。
(もっと読む)
速度検知方法及び装置
標的物体(16)の動作方向に所定距離(L)だけ離間して配置された一組のセンサユニット(12)を通過する標的物体の速度を計測するための方法及び装置。第一センサユニット(12A)を通過する標的物体(16)の1つ又はそれ以上の特性の通過は信号(x1)は発生を引き起こし、第二センサユニット(12B)を通過する標的物体(16)の同一の特性は第二信号(x2)を引き起こす。信号プロセッサ(18)が、信号(x1)及び信号(x2)の間の数学的相互連関、並びに、関連する時間遅延(τ0)を決定するよう構成されている。標的物体(16)の速度(v)は、時間遅延(τ0)に対する所定距離(L)の比率として、信号プロセッサ(18)によって計算される。  (もっと読む)
(もっと読む)
減速機構及びポンプの統合アセンブリ
減速機構及びジロータポンプの統合アセンブリ(1)が開示されている。装置は、モータ(50)と、減速機構(100)と、ジロータポンプ(200)とを含む。モータ(50)は高速でトルクを供給する。減速機構(100)はモータ(50)に結合され、高速な速度でのトルクを、減速された速度でのトルクに転換する。ジロータポンプ(200)は減速機構に結合され、流体をポンピングするために、減速された速度でのトルクを用いる。  (もっと読む)
(もっと読む)
可変粘性流体を有するクラッチ
クラッチ(A、B)はカム(20、70)とロータ(22、74)とを有し、両者は共通の軸線(X)の回りに回転する。カムは、ローブ(32)が設けられたカム面(30,72)を有し、その一方、ロータはカムのカム面に支持されたピストン(26、80)を保持する。ピストンは、ロータ内のピストン孔(40、42;76)から突出し、それらの孔は連結空洞(44、78)を介して連通し、それにより磁気レオロジー流体(28、84)を含む一定容積の流体室が形成される。電気コイルは、レオロジー流体の粘性を制御する。粘性が低い場合、カム面がピストン上を通過するにつれてピストンが内外に移動し、カムとロータとの間でトルクは伝達されない。しかしながら、流体が高粘性の場合、流体がピストン孔におけるピストンの移動を妨げ、ピストンはカムとロータとの間でトルクが伝達されるようにカム面を十分に掴む。  (もっと読む)
(もっと読む)
牽引駆動のためのウェッジ負荷機構
偏心遊星牽引駆動装置(1)のためのウェッジ負荷機構は、可撓に取り付けられた軸(4)を有するローラ(7)が、収束ウェッジ(AOB)を形成する2つの軌道(2及び3)の間に位置する。2つの軌道(2及び3)のいずれか一方の回転はローラ(7)を収束ウェッジ内に楔留めし、ローラを2つの軌道(2及び3)の間に締め付けることによって、2つの軌道(2及び3)間で回転運動及びトルクを伝達する。可撓に取り付けられた軸(4)は、ローラの有効支持剛性と、ローラが2つの軌道(2及び3)と接触する接点における有効接触剛性との間に差を発生する。有効剛性の差によって、ローラは小さな収束ウェッジ角で動作し得る。 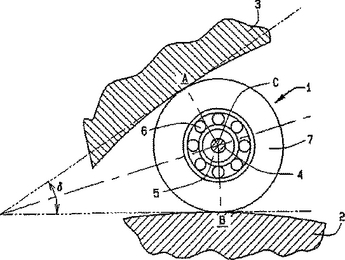 (もっと読む)
(もっと読む)
可変ねじり剛性を有するスタビライザバー
自走車両の横揺れを制御するスタビライザバー(D)は、左右セクション(16、18)を有し、それぞれがねじり棒(24)およびトルクアーム(26)を備える。ねじり棒は横軸線(X)に沿って位置合わせされ、車両の構成要素(B)に取り付けられており、トルクアームは、車両の懸架装置(A)の左右制御アーム(2)に連結されている。さらに、スタビライザバーは、2つのセクションのねじり棒同士の間の継手(20)と、継手に連結されたバルブ(22)とを有し、それらは全て、スタビライザバーのねじり剛性を制御するためのものである。ニュートラル位置から一方のねじり棒が他方に対して回転すると、継手内のピストン(40)が、継手から磁気粘性流体を排出する。バルブの中には制限器(98)と、制限器に、バルブ内の流体の粘性を制御するコイル(104)とがあり、これが、流体が空洞から排出される割合を決定し、それがピストンを動かすのに必要な力を、最終的にスタビライザバーのねじり剛性を決定する。 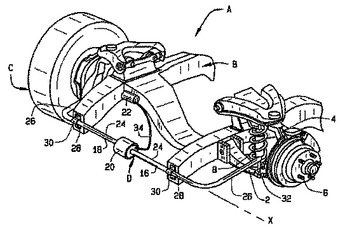 (もっと読む)
(もっと読む)
シールを備えるベアリング組立体
ベアリング組立体(A−H)は、一の部材(4)を他の部材(2)に対して軸(X)まわりに回転することを可能とする。それは、一方の部材上のインナレース(54)と、他方の部材上のアウタレース(74、126,164,250)と、2つのレース上のレースウェイ間の回転部材(58)とを含む。シール(10,180,210,256)は、ベアリングの内部から異物を除外し、それは、アウタレース上の当該レースのレースウェイを越えるエクステンション(80,128,144,168,252)により担持される磨耗リング(92,184,214,276)、及び、インナレースが配置される部材又はインナレースに嵌合されるカン(110,230,254)により担持される接触磨耗リング(90,182,212,278)を含む。シールは、また、磨耗リングを担持するバッキング部材(94,96,192,194,216,218,294)を含み、たいていの場合、バッキング部材は、磨耗リングに付勢力を付与して互いに接触状態に維持させ、それらが動的な流体バリアを確立するようにさせる。バッキング部材は、Oリング(94,96)、ポリマー接続部(200)、若しくはスプリング(292)及び隔膜(294)を含んでよい。
 (もっと読む)
(もっと読む)
1 - 8 / 8
[ Back to top ]