
株式会社テクニカルにより出願された特許
1 - 2 / 2
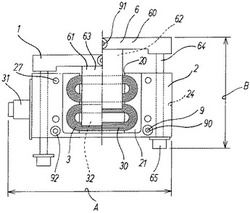
プレパラート用グリッパーヘッド
【課題】 プレパラート周縁を水平把持可能で、顕微鏡ステージ上の狭い空間内に効率的に搬送できる程度に充分に軽量小型、薄型化してなる新たなロボットハンド技術を提供する。
【解決手段】 凹状装着部21に薄型コイル30を装着し、該凹状装着部21を挟む左右端がわ夫々に左右ガイドレール部24,24を形成したベース2を設けると共に、進退枠60から薄型マグネット32を有するヨーク61を突設し左右端がわから左右スライドピン64,64を延伸した可動体6を形成し、該薄型マグネット32を薄型コイル30に対峙可能とするよう、左右スライドピン64,64夫々を左右ガイドレール部24,24に前後進退自在に組み込んだ上、ベース2の後辺寄り下面適所、および、可動体6進退枠60の下面適所夫々に、三点クランプピン9を垂下、突設してなるプレパラートP用グリッパーヘッド1である。
(もっと読む)
寸法測定装置

【課題】 被検物体の各面を高精度に同時に寸法測定できる装置を提供すること。
【解決手段】 一例として、被検物体11の一または二以上の側面について各側面画像を得るための、光路方向転換部30a等を備えた側面画像取得用プリズム系3A等からなる多方向同時観察光学系を用い、その光出力方向上の合焦点位置にテレセントリックレンズ41を設け、さらに、取得された画像情報に基づき被検物体11の側面および上面における所望の寸法を測定するための測定手段を備えた構成の寸法測定装置とする。
(もっと読む)
1 - 2 / 2
[ Back to top ]