
株式会社 弘 前 機 械 開 発により出願された特許
1 - 1 / 1
プレパラート用グリッパーヘッド
【課題】 プレパラート周縁を水平把持可能で、顕微鏡ステージ上の狭い空間内に効率的に搬送できる程度に充分に軽量小型、薄型化してなる新たなロボットハンド技術を提供する。
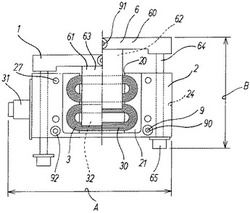
【解決手段】 凹状装着部21に薄型コイル30を装着し、該凹状装着部21を挟む左右端がわ夫々に左右ガイドレール部24,24を形成したベース2を設けると共に、進退枠60から薄型マグネット32を有するヨーク61を突設し左右端がわから左右スライドピン64,64を延伸した可動体6を形成し、該薄型マグネット32を薄型コイル30に対峙可能とするよう、左右スライドピン64,64夫々を左右ガイドレール部24,24に前後進退自在に組み込んだ上、ベース2の後辺寄り下面適所、および、可動体6進退枠60の下面適所夫々に、三点クランプピン9を垂下、突設してなるプレパラートP用グリッパーヘッド1である。
(もっと読む)
1 - 1 / 1
[ Back to top ]