
オーソソフト インコーポレイテッドにより出願された特許
1 - 10 / 11
膝の手術における大腿骨切断についての決定

【課題】膝関節置換手術における、大腿骨の先端部の切断厚さ、および、後端部の切断厚さ、を決定する方法ならびにシステムを提供する。
【解決手段】かかる方法は、脛骨の切断を実行するステップ;所望の肢体配置に基づき、軟部組織のバランシングを実行するステップ;伸長状態における大腿骨と前記脛骨の切断との間の伸長ギャップを測定するステップ;屈曲状態における大腿骨と前記脛骨の切断との間の屈曲ギャップを測定するステップ;前記伸長ギャップならび前記屈曲ギャップを用い、大腿部インプラントの大腿骨の先端部の切断厚さおよび後端部の切断厚さ、を考慮して、大腿骨の先端部の切断厚さおよび後端部の切断厚さ、を演算するステップ;ならびに、先端部の切断厚さおよび後端部の切断厚さに基づき、前記大腿骨切断を実行するステップ;を備えている。
(もっと読む)
手術用自在位置決めブロックおよびツ−ルガイド

【課題】骨エレメントに対し、5自由度移動を許容する、人工膝関節置換手術に用いられる位置決めブロックを提供する。
【解決手段】位置決めブロック10は、回転取り付けエレメント14が、骨エレメントに対し、ほぼ垂直な3つの回転軸の周りを選択的に回転可能となるよう、骨エレメントに取り外し可能に取り付けられる、回転取り付けエレメント14を備えている。ガイドボデイー部12は、取り付けエレメント14に対して、自身が移動可能となり、骨エレメントに対して、ガイドボデイー部12および取り付けエレメント14が一緒に回転するよう、取り付けエレメント14と嵌合する。
(もっと読む)
骨への変更を計画/誘導するための方法およびシステム
手術の際に骨への変更を計画/誘導するコンピュータ支援手術システムは、骨に固定される追跡可能部材を備える。追跡可能部材は、追跡可能部材の少なくとも2自由度の方向に関する方向ベースのデータを作成する第1慣性センサユニットを有する。位置決めブロックは骨に固定されるよう成され、位置決めブロックが骨に固定されて、骨の変更時にツールを誘導するために位置決めブロックを用いる選択方向に達すると、少なくとも位置決めブロックの方向が調節できる。位置決めブロックは、位置決めブロックの少なくとも2自由度の方向に関する方向ベースのデータを作成する第2慣性センサユニットを有する。骨を追跡可能部材に関連付ける方向基準を提供する処理システムは、方向ベースのデータから追跡可能部材および位置決めブロックの方向を決定する信号インタープリタを備える。パラメータ計算機は、方向基準の関数および位置決めブロックの方向の関数として、骨に対する位置決めブロックの実際の方向に関する修正パラメータを計算する。  (もっと読む)
(もっと読む)
追跡装置および追跡方法
物体を追跡するための追跡システムが提供される。第1および第2追跡可能部材の各々は、方向ベースのデータを少なくとも作成する慣性センサユニットを有する。処理ユニットは、複数の追跡可能部材から方向ベースのデータを受信する。処理ユニットが、前記両方の追跡可能部材の方向ベースのデータから、第1追跡可能部材に対する第2追跡可能部材の方向を計算する方向計算部を有することにより、処理ユニットは物体の方向を計算する。方法もまた提供される。  (もっと読む)
(もっと読む)
光学追跡CASシステム
外科手術の間、対象物を追跡するためのコンピュータ支援手術システムが、対象物の2個の部分に固定された2個の追跡可能装置を含む。装置はそれぞれ幾何学的パターンに配置される光学素子を有する。所定の方向の範囲において、各装置が同時に重複して検出可能であるように、各装置が別個に対象物に固定されており、組み合わされた幾何学的パターンは、追跡可能装置の光学素子の少なくとも一部の組み合わせから決定される。検知ユニットは、いずれかの追跡された幾何学的パターンの追跡データを検知する。パターン識別部は、幾何学的パターンの既知のパターンデータから、幾何学的パターンのうち追跡されているものを特定する。位置および方向演算部は、特定された幾何学的パターンの追跡データと、特定された幾何学的パターンおよび対象物との間の既知の空間的関係との関数として、対象物の位置および方向を演算する。対象物を追跡するための方法もまた提供される。  (もっと読む)
(もっと読む)
コンピュータ支援手術用多面追跡装置
手術器具の位置が演算可能となるよう、CASシステム(100)により空間での追跡可能であり、手術器具と関連するタイプの追跡装置(10、10’、10’’)である。 手術器具に接続するため支持体(12)が採用される。光学素子は、第一の視程に従ってCASシステムにより検出されるよう第一のパターン(44A)で支持体(12)に設けられている。他の光学素子は、第二の視程に従ってCASシステムにより検出されるよう第二のパターン(44B、44C)で支持体に設けられており、ほぼ共通する部分を有する前記第一の視程ならびに前記第二の視程を有しており、これにより、前記光学素子のいずれかのパターン(44A、44B、44C)の検出結果に応じて、前記手術器具の位置が、前記第一の視程および第二の視程内で追跡される。 (もっと読む)
コンピュータ支援式大腿骨頭表面再建の方法および装置
大腿骨頚上においてガイドワイヤ軸を位置設定する方法が、大腿骨の位置および方向付けを追跡し;予め定めた構成において大腿骨上に装着される第1位置合わせプローブからの大腿骨の位置および方向付けに対して基準フレームを位置合わせして、当該基準フレームが大腿骨頚に関連する術前計画データを有するように成し;所望の方向付けにおいて大腿骨頚上に位置決めされる第2位置合わせプローブからの大腿骨の位置および方向付けに対して大腿骨頚データをデジタル化し;術前計画データおよび大腿骨頚データの関数として大腿骨の位置および方向付けに対するガイドワイヤ軸の位置および方向付けを計算する、各ステップを含む。  (もっと読む)
(もっと読む)
股関節置換術における外科的パラメータ測定のための脚アライメント
股関節置換術を実施中に外科的パラメータを測定して、股関節インプラントを大腿骨内に挿入する際に、オペレータ(S)を誘導するためのCAS(コンピュータ支援システム)システム(50)および方法(100)であって、骨盤との関係が固定されている第1追跡可能基準(56)、およびレジストレーションツール(56)を含む。センサ装置(54)が、第1追跡可能基準(56)およびレジストレーションツール(56)を追跡する。第1追跡可能基準(56)およびレジストレーションツール(56)の追跡データを受信するコントローラユニット(52)が、センサ装置(54)に接続する。コントローラユニット(52)は、追跡データから、骨盤基準系を追跡するために骨盤の追跡可能基準(56)の位置および方向を、次いで、大腿骨基準系を生成するためにレジストレーションツール(56)の位置および方向を、順次実行される二つのステップで計算する位置および方向計算器(202)を有する。基準方向調整器(204)が、骨盤基準系、および第1追跡可能基準(56)と関係付けられる大腿骨基準系の追跡データを受信して、骨盤基準系に対して基準方向となるように大腿骨基準系の方向を向け、基準方向の関数として基準調整値を生成する。外科的パラメータ計算器(206)が、レジストレーションツール(56)から追跡データを受信して、基準調整値の関数として外科的パラメータを計算し、順次に実行される二つのステップで、外科的パラメータが基準方向により関連付けられる。 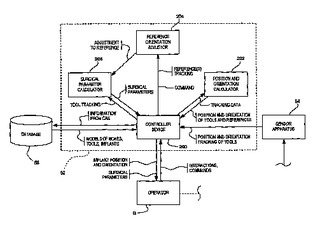 (もっと読む)
(もっと読む)
物体を追跡するための無線システム
物体に接続可能なトランスポンダ装置(12)を備えた、位置を求めるために空間において物体を追跡するためのシステム(10)である。前記トランスポンダ装置(12)は、一又は数個のトランスポンダアンテナ(20)、ならびに、それを介して無線信号を受信するためトランスポンダアンテナ(20)に接続されたトランスポンダ回路(21)を有している。当該トランスポンダ装置(12)は、無線信号に対して既知の遅延を加算し、これにより、トランスポンダアンテナ(20)を介して送信するための無線応答を生成する。送信器(42)は、それを介して無線信号を送信するための第一アンテナ(43)に接続されている。受信器(42)は、それを介してトランスポンダ装置(12)の無線応答を受信するため、第一、第二ならびに第三アンテナ(43、44、45)に接続されている。位置算出器(46)は、物体の位置を、既知の遅延に応じ、ならびに、第一、第二、第三アンテナ(43、44、45)からの無線信号の発信から受信までの時間として算出するため、送信器(42)および受信器(42)に関連づけられている。また、方法も提供される。 (もっと読む)
コンピュータ支援の人工股関節置換手術
脚の長さおよび大腿骨に対する大腿骨インプラントの方向に応じて、大腿骨インプラント挿入することについてオペレーターを導くCASシステムおよび方法であって、前記大腿骨対する基準器具、登録器具、骨変更器具、およびセンサ装置を備えている。コントローラーは、i) 前記センサ装置により提供された前記登録器具の位置および方向に応じて、前記登録器具により提供された演算した表面情報によって、前記大腿骨の基準フレームを登録し、および/又は前記大腿骨のモデルをデータベースに取り込み、ii) 足の長さに応じて、前記基準フレームに対する所望のインプラント位置を演算し、およびiii) 前記センサ装置により与えられる前記骨変更器具の位置および方向、ならびに、前記データベースにより提供される大腿骨インプラントのデジタルモデルの位置および方向に応じて、前記骨変更器具を用いて前記大腿骨において実行される変更に対する所望インプラントの位置との関係で現在のインプラント位置および方向を演算している。前記データベースは、前記コントローラーの動作に関する情報を記憶し、取り込むため、前記コントローラーに接続される。かかるコンピュータ支援システムは、骨盤に対する骨盤インプラントの方向に応じて、骨盤インプラントを挿入することについて、オペレーターを導くために用いてもよい。
 (もっと読む)
(もっと読む)
1 - 10 / 11
[ Back to top ]