
アイロボット コーポレーションにより出願された特許
1 - 9 / 9
自律ロボットのドッキング方法

【課題】基地局の位置に関わりなく確実に適切な結合ができるロボットおよび基地局を提供すること。
【解決手段】ロボット装置を基地局とドッキングさせるための方法は、オンボードバッテリにおいて低エネルギー準位を検出するステップと、前記ロボットを、前記ステーションによって放射された2つの赤外線ビームの間に検出された重複に対して方向を合わせるステップと、前記ロボットおよび前記基地局における充電端子の間の接触を検出するステップと、オンボードバッテリに充電するステップと、掃除機かけなどのロボットのタスクを再開するステップとを含む。前記ロボットと前記基地局との間の不注意による接触を防止するために回避信号を放射するためのシステム、および前記ロボット装置を前記基地局と正確にドッキングさせるために帰還信号を放射するためのシステムも開示される。
(もっと読む)
ロボットシステム
省電力ロボットシステム(100)は、移動式ロボット(104)のある環境下に置かれる、少なくとも1つの周辺装置(102)を含む。周辺装置は、周辺装置が完全に動作するアクティブモード(938)と、周辺装置が少なくとも部分的にアクティブでないハイバネーションモード(932)とをもつ制御装置(1026)を有する。移動式ロボット(104)は、無線通信構成要素(1024、1044)を経由して周辺装置(102)と通信し、周辺装置(102)の無線通信構成要素(1024、1044)とロボット(104)とが互いの範囲内になると、ハイバネーションモード(932)から周辺装置(102)を一時的に作動させる作動ルーチン(904)をもつ制御装置(1046)を有する。  (もっと読む)
(もっと読む)
モジュール式ロボット
シャーシ(202)と、シャーシ上に配置された複数の駆動車輪アセンブリ(110a−110b)と、シャーシにより担持される清掃アセンブリ(112、102)とを含むカバレッジロボット(100)。各駆動車輪アセンブリは、駆動車輪アセンブリハウジング(324a−324b)と、該ハウジングに回転可能に連結された車輪(326a−326b)と、駆動車輪アセンブリハウジングにより担持され車輪を駆動するよう作動可能である車輪駆動モータ(328a−328b)とを含む。清掃アセンブリ(112、102)は、清掃アセンブリハウジング(332、338)と、清掃アセンブリハウジングに回転可能に連結された清掃ヘッド(334、340)と、清掃アセンブリハウジングにより担持され清掃ヘッドを駆動するよう作動可能である清掃駆動モータ(336、342)とを含む。  (もっと読む)
(もっと読む)
自律カバレッジロボットナビゲーションシステム
ナビゲーションビーコン(150、202、203、304)と、自律カバレッジロボット(100、212、302)とを含む、隣接する有界領域(204、206)のための自律モバイルロボットシステム。ナビゲーションビーコンは、第1の有界領域(204)と、隣接する第2の有界領域(206)との間のゲートウェイ(210)内に配置されたナビゲーションビーコンによって、ゲートウェイマーキングエミッション(208、316)を伝送するように構成されたゲートウェイビーコンエミッタ(152)を有する。自律カバレッジロボットは、ビーコンエミッションに対応するビーコンエミッションセンサ(104、106)と、ゲートウェイマーキングエミッション(208、316)の検出に応えてロボットの方向を換える清掃モードで、ロボットを第1の有界領域(204)周辺を操縦するように構成された駆動システム(130、132)とを含む。  (もっと読む)
(もっと読む)
カバレッジロボット移動性
自律カバレッジロボットが、シャーシ(102)と、ロボットを操縦するための駆動システム(104)と、縁部掃除ヘッド(106、214、274、316)と、床を横切ってロボットを操縦し続ける間に、縁部掃除ヘッドに関連するモータ電流を監視し、かつ高いモータ電流に応答して縁部掃除ヘッドモータを逆バイアスするように構成された制御装置(108)とを具備する。別の態様では、自律カバレッジロボットは、衝突センサ(132)および近接センサ(134)を具備する。駆動システムは、前進方向における潜在的な障害物の検出を示す近接センサ(314)からの信号に応答して速度設定を低減し、他方では方位設定に従ってロボットの前進を継続するように構成される。さらに、駆動システムは、障害物との接触を示す衝突センサ(132)から受け取った信号に応答して方位設定を変更するように構成される。  (もっと読む)
(もっと読む)
個人の相互交流のためのコンパニオンロボット
人間の居住者と相互交流するための来客としての移動ロボットは、居住者との相互交流に先立ち、部屋を縦横に捜索手順を実行し、目的の居住者が在宅しているか口頭で尋ねることがある。居住者を探した時点で、移動ロボットは、遠隔地第三者とのテレビ会議セッションを実施する、または種々の方法で居住者と相互交流することができる。例えば、ロボットは、居住者と会話をし、薬剤の遵守または他のスケジュールなどを注意したりできる。さらに、ロボットは、居住者との衝突を回避するための安全機能を組み込み、またロボットは、危険な障害にならないように、その存在を聞こえるように知らせる、および/または目に見えるように示すことがある。さらに、あらゆるセンサデータの保存または伝送が居住者に承認されることを必要とするために、移動ロボットは、組み込まれたプライバシーポリシーに従い行動する。  (もっと読む)
(もっと読む)
湿式および乾式清掃用の自律的表面清掃ロボット
自律的床清掃ロボット(100)は、床清掃作業を行うために、床上でのロボットの自律的移動のために構成される、移動駆動部および制御システム(300、900)を含む。ロボット筐体(102)は、清掃表面から遊離した粒子状物質を吸引するように構成される清掃要素を備える第一清掃域(A)と、表面に洗浄液を塗布し、その後に、表面を清掃するために使用された後に前記洗浄液を表面から回収するように構成される清掃要素を備える第二清掃域(B)とを有する。前記ロボット筐体は、洗浄液の補充と、清掃表面から回収される廃棄物を格納するための廃棄物容器(D)とを有する。  (もっと読む)
(もっと読む)
携帯ロボットのプログラミングおよび診断ツール
ロボットデバイス(18、20)と通信する方法およびその関連するシステムは、構成情報および診断情報がロボットデバイス(18、20)および構成ツール(12)との間で通信することを可能にする。方法は、特定のタスクまたは機能を実行するようにデバイスをプログラムする情報をロボットデバイス(18、20)へ通信し得る、携帯デバイスなどの構成ツール(12)からなる。構成ツール(12)はまた、ロボットデバイスから診断情報を取り入れるように、および分析ツールへその情報を通信するように構成し得る。ある実施形態において構成ツールは、異なる構成プログラムとともにインストールされ得、構成ツールがロボットデバイスの性能特質を変更または強化することを可能にする。結果として、構成ツールを、単一のユーザまたは複数のユーザの特定の要件に基づいてロボットデバイスの性能を調整するアクセサリとして作成することが可能であり得る。 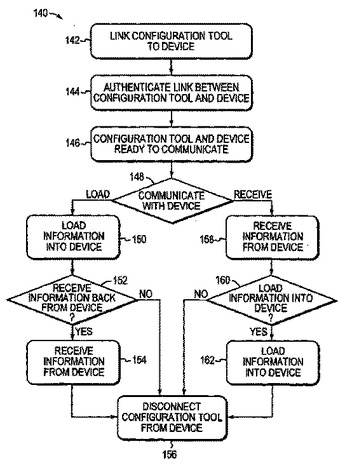 (もっと読む)
(もっと読む)
自律ロボットのドッキング方法
ロボット装置を基地局とドッキングさせるための方法は、オンボードバッテリにおいて低エネルギー準位を検出するステップと、前記ロボットを、前記ステーションによって放射された2つの赤外線ビームの間に検出された重複に対して方向を合わせるステップと、前記ロボットおよび前記基地局における充電端子の間の接触を検出するステップと、オンボードバッテリに充電するステップと、掃除機かけなどのロボットのタスクを再開するステップとを含む。前記ロボットと前記基地局との間の不注意による接触を防止するために回避信号を放射するためのシステム、および前記ロボット装置を前記基地局と正確にドッキングさせるために帰還信号を放射するためのシステムも開示される。  (もっと読む)
(もっと読む)
1 - 9 / 9
[ Back to top ]