
ヘキサゴン メトロロジー エービーにより出願された特許
1 - 9 / 9
座標測定機に使用するための測定プローブ
【課題】より正確な測定を可能にする新規な測定プローブを得ること。
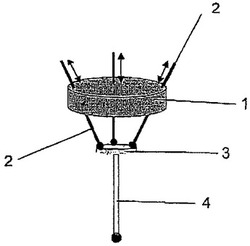
【解決手段】座標測定機に使用するための測定プローブが、座標測定機に接続された基部1、測定チップ4、および測定チップ4の第1の端部に配置された球5を有している。測定チップ4は、基部1によって支持される少なくとも3つのリジッドな支持体2を用いてその第2の端部で支持され、それにより支持体2が球形の接続部によって測定チップに接続され、支持体2をその長さ方向に沿って基部1に対して移動させることが可能になる。支持体2は、程度にかかわらず基部1の測定チップ・ホルダ3と反対の側に突出することによって基部1を貫通すること、およびその長さ方向に沿って移動させることができるように配置されている。
(もっと読む)
測定ヘッドのための調節デバイス
測定ヘッドのための調節機構、特に、座標測定機での測定ヘッドによって支持される測定プローブ3の較正を簡略化するための調節機構であって、プローブ・ボール7の測定位置を決定するための手段を備え、該手段が、プローブ・ボールの新たな測定位置を決定するためにプローブ・ボールを回転又は変位させる、或いはその両方を行うように構成され、それによりプローブ・ボール7のオフセットを求めることができる調節機構。  (もっと読む)
(もっと読む)
電気信号の振幅状態測定方法
長さまたは角度を測定するための容量性測定スケールの信号処理方法であって、一緒にコンデンサを形成する電極が設けられた互いに移動することができる2つの部分からなり、その大きさは可変であって互いに移動することができる2つの部分間の正弦状関係(xC)により指定される相対的位置によって決まり、第1の部分は1つの測定周期にわたって均一に分布されたnの電極を有し第2の部分は測定周期当たり1つの電極を有し、第1の部分内の電極には交流電圧が供給され前記交流電圧の互いの時間変位は(図1)であり、ここにt0はnの前記交流電圧の周期の長さであり、第2の移動部の電極は1つまたはいくつかの前記交流電圧から構成される信号を容量性方法で捕捉し、コンポジット信号の振幅合成は2つの部分間の相対的位置(x)によって決まる。nの信号全ての前記振幅合成への寄与が測定されnのサンプリングの各々に対して個別に格納される。  (もっと読む)
(もっと読む)
測定システムに用いる測定方法及び測定装置
座標測定器及び類似の計測器など測定システムに用いる測定方法及び測定装置であって、位置検出器が物体の形状及び寸法を測定するためにその位置を計量するよう配置される測定方法及び測定装置である。この位置検出器は支持体によって支持され、この位置検出器の位置及び方位は、加速度計、GPSレシーバ及びジャイロスコープのうち少なくとも1つからのデータを用いて計算を介して測定され、既知の始動位置に基づいている。 (もっと読む)
被加工材の溶接方法
被加工材同士を溶接する方法。互いに溶接すべき被加工材(A,B)はロボット(1,2)で保持され、ロボット(1,2)は被加工材(A,B)を溶接により結合するために相対的に位置決めし、また、溶接(9)の遂行中は被加工材をそれらの位置に保持する。測定システム(3,4)が被加工材の位置を測定し、溶接(9)が開始される前に被加工材の位置を調整できるようにする。  (もっと読む)
(もっと読む)
座標測定機
その座標が測定される測定対象物を支持する支持テーブル1の表面の上方に測定ヘッドを支持する支持梁4を備える、測定対象物の表面上のいくつかの点の座標を決定する座標測定機。この支持梁4は、2本の脚部7、8によって支持テーブル1の上方に支持され、これらの脚部は、支持梁4及び測定ヘッドを支持テーブル1に対して前後方向に変位させるように、支持テーブル1に沿って共に変位させることが可能なだけでなく、支持梁4及び測定ヘッドを支持テーブルに対して上下させるように、脚部7、8を支持テーブル1に沿って互いに対して異なる方向に変位させることも可能である。  (もっと読む)
(もっと読む)
座標測定機に使用するための測定プローブ
座標測定機に使用するための測定プローブが、座標測定機に接続された基部1、測定チップ4、および測定チップ4の第1の端部に配置された球5を有している。測定チップ4は、基部1によって支持される少なくとも3つのリジッドな支持体2を用いてその第2の端部で支持され、それにより支持体2が球形の接続部によって測定チップに接続され、支持体2をその長さ方向に沿って基部1に対して移動させることが可能になる。支持体2は、程度にかかわらず基部1の測定チップ・ホルダ3と反対の側に突出することによって基部1を貫通すること、およびその長さ方向に沿って移動させることができるように配置されている。 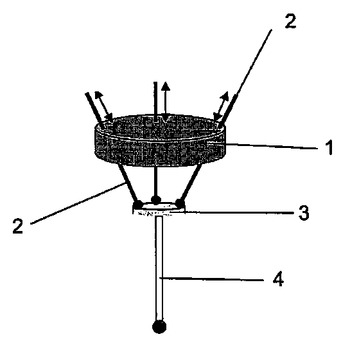 (もっと読む)
(もっと読む)
座標測定器に使用するための測定用探針
座標測定器に使用するための測定用探針は、座標測定器に連結された基部1と、測定先端部4と、測定先端部4の第1端部に配置された球5とを含む。前記測定先端部4は、別の端部において、前記基部1によって支持された少なくとも3個の剛性支持体2を用いて支持され、これによって前記支持体2は球形連結部によって前記測定先端部に連結され、前記支持体2は、前記基部1に対してこれらの長手方向に沿って変位可能である。 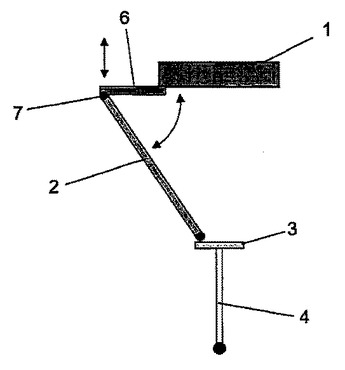 (もっと読む)
(もっと読む)
座標測定機械
本発明は測定対象物の表面における多数の点の座標を検出する座標測定機械であって、その座標を検出すべき対象物を支持する支持テーブル(10)の表面の上方で測定ヘッド(7)を支持している支持梁(1)を含み、該座標測定機械は個別に製造されたユニットであって、少なくとも支持梁(1)と、測定トロリー(2)と、測定ヘッド(7)を含むユニットから構成されており、前記支持梁(1)は該支持梁に沿って移動可能であるように配置されている測定トロリー(2)を支持しており、前記測定トロリー(2)の方は前記測定ヘッド(7)を支持している座標測定機械に関するものである。本発明による座標測定機械は前記ユニット(1,2,7)が個々に較正されており、前記測定トロリー(2)が前記測定ヘッド(7)および前記支持梁(1)のための機械的(6,12)および電気的(13)の双方の取り付け点を含み、前記機械的な取り付け点が、個別に製造された前記ユニットが座標測定機械に簡単に接合可能であるように相互に接合されたときに幾何学的変形が何ら発生し得ないように設計されていることを特徴とする。  (もっと読む)
(もっと読む)
1 - 9 / 9
[ Back to top ]