
ノモス コーポレイションにより出願された特許
1 - 2 / 2
放射線治療装置のジオメトリを監視するシステム、追跡可能アセンブリ、プログラム製品及び関連方法
治療装置31のジオメトリを監視するシステム30、装置51、追跡可能アセンブリ43、プログラム製品81及び方法が提供される。システム30は、放射線発射器33を有する治療装置31と、コントローラ39によって制御された回転アセンブリ35と、コントローラ39に治療送達命令を提供するアプリケーション・コンピュータ41とを含む。システム30はさらに、回転アセンブリ35に接続された追跡可能アセンブリ43であって、基準固定物として機能する固定して接続された第1の追跡可能体45を有する追跡可能アセンブリ43と、回転アセンブリ35の回転角を決定するのに使用されるデータを提供する、枢動可能に接続された第2の追跡可能体49とを含むことができる。システム30はさらに、追跡可能体を追跡する装置51を含み、装置51は、第1及び第2の追跡可能体45、49によって担持されたインジケータ47の位置を検出する追跡可能体検出器53と、アイソセンタ座標系の原点57の位置を決定、検証し、回転アセンブリ35についての回転経路データを決定する決定器55とを有する。 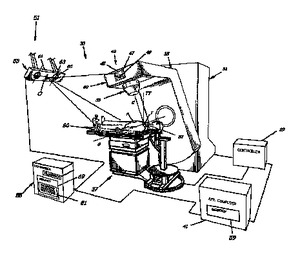 (もっと読む)
(もっと読む)
放射線治療装置の幾何学的形状を分析するためのシステム、ソフトウェア、及び関連する方法
放射線治療装置31の幾何学的形状を分析するためのシステム30、ソフトウェア71、及び方法が提供される。システム30は、回転式アセンブリ51、53、55の予め選択された部分のマーキングするための、回転式アセンブリ51、53、55及び1つ又は複数の追跡可能な本体33を有する装置31を備える。システム30は、追跡可能な参照固定部35も含み、一定の向きの追跡可能な本体36を備えることもできる。デターミナー39は、追跡可能な本体33、追跡可能な基準固定部35及び一定の向きの追跡可能な本体36の位置及び/又は向きを特定する。デターミナー39は、オペレータによって使用される座標系を分析するために装置31の幾何学的形状を特定する。デターミナー39は、装置の幾何学的形状を分析するためにメモリ69に記憶されたメモリ69及び幾何学的形状分析ソフトウェア71を有することができる。 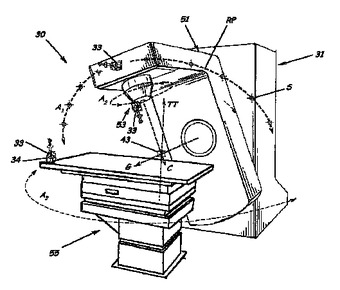 (もっと読む)
(もっと読む)
1 - 2 / 2
[ Back to top ]