
プロサージックス リミテッドにより出願された特許
1 - 8 / 8
焼灼装置
【課題】焼灼手術によって影響される患者の部分の形状および位置を正確に認識すること。
【解決手段】外科手術において焼灼装置として使用するための次からなる外科器具:焼灼される容量を形成するために外科場所において物質の容量を焼灼するための形状である焼灼モジュール出力端;外科場所の位置を示す情報を受けとるために配置された制御モジュール;および少なくとも焼灼される容量の部分が流体で満たされそして流体が少なくとも外科場所の部分と直接接触し、そこで制御モジュールが外科場所の位置を制御するために受けとられた情報に応答して流体出力端によって供給される流体の流量を制御するよう操作できるように外科手術の間外科場所に流体を供給するために適用される流体出力端。さらに、外科場所の少なくとも部分の観察で使用者に提供するために適用される光学装置を含む。
(もっと読む)
器具保持器

【課題】外科器具支持装置、外科器具支持装置を製造する方法、外科器具支持装置を結合するための弁モジュール、支持腕および外科システムを提供する。
【解決手段】支持腕1は、柔軟な管状本体;そして第1の形状で流体が少なくとも部分的にビーズ3を取りまき、そして第2の形状で流体の少なくともいくらかが腕1の固さが増加されるように排出される実質的に流体気密でない管状本体内に含まれる多数のビーズ3からなる構成とする。
(もっと読む)
クランプ
【課題】クランプに保持された目的物にかかるクランプする力を制御できるなどの特性を備えるクランプの提供。
【解決手段】さらなる目的物に対して取り離せるように固定されるに適したクランプ(1)であって、クランプは次を含んでなる:クランプは取り離せるように固定されているさらなる目的物に対してクランプする力をかけるためのおのおのの形状である第1および第2クランプ部材;そして第1軸が第2軸と交わり、第1軸および第2軸にそれぞれ沿ってお互いに関して第1および第2クランプ部材両方の動作を駆動するに適した一つのクランプ推進器により課題を解決できる。
(もっと読む)
制御組立体
【課題】内視鏡器械の動作を操縦するための制御組立体を提供する。
【解決手段】内視鏡器械6の動作を操縦するための制御組立体であって、その制御組立体は次からなる:内視鏡器械6を支えるに適しそして内視鏡器械取り付け配置3、4により支えられる内視鏡器械6の動作の三つの独立した自由度のみを提供し、各動作の自由度がそれぞれの軸の周囲あるいは軸に沿っている内視鏡器械取り付け配置;動作の自由度の一つのみで内視鏡器械を駆動するようそれぞれ設定されている三つの駆動配置;そして三つの独立した制御部品のそれぞれの推進が、使用者の入力に従う他の二つの駆動配置のそれぞれの一つを独立してそれぞれ制御するところの三つの対応する制御信号の一つを制御するように、使用者の入力を受信するよう設定されている三つの独立した制御部品。
(もっと読む)
医療用装置を操縦するための配置
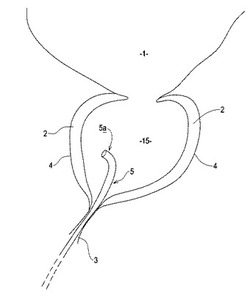
【課題】腹腔鏡等の医療用装置を操縦するための改善された制御装置を提供する。
【解決手段】外科用ロボット3は患者1の方へ延びる腕(arm)4を持っており、腹腔鏡を含む種々の外科用器具のいずれか一つを保持するホルダーを持っている。腹腔鏡はホルダーに保持され、患者1の腹部の切り口5に挿入される。外科用ロボット3はインターフェース6を介して制御され、外科医により患者1の身体内の腹腔鏡の移動を制御するために操縦するボタンあるいはジョイスティク(joystick)を持つ制御盤からなる。腹腔鏡の動きは外科ロボット3あるいは腕4内にある一つ以上のモータにより達成される。一つの例として、外科医は腹腔鏡を上下左右に動かしたり、傾かせたり、像を拡大・縮小させたりの制御ができる。
(もっと読む)
準拠枠登録システム及び方法
【課題】CTスキャナでの基準マーカの使用は、患者の実際の位置がロボットの準拠枠内で正確に登録されないか、または以前の画像と一致しない。患者をロボットの準拠枠内で登録するに要する処理技術は複雑であって時間を要する。
【解決手段】準拠枠を有し、ワークピース上で遂行される作業を援助するシステムが提供される。該システムは、その準拠枠内の第1ロケーションの位置を登録する参照用構成と、ツールを保持してワークを援助するための、システムの準拠枠内の位置が既知であるツールホルダと、ワークピースに関係した画像データであって第1ロケーションに対する位置によってインデックス付けされた画像を表す画像データを受信するデータインターフェースと、画像データによって第1ロケーションに関して表される画像の相対位置と、システムの準拠枠内の第1ロケーションの位置とを使用することによって、画像データをシステムの準拠枠内で登録する処理構成と、を備える。
(もっと読む)
フィデューシャルマーカの配置
【課題】次の段階からなる2つあるいはそれ以上のフィデューシャルマーカ(3)の予期する位置(5)を決定する方法:ワークピース(2)に関して、原点からの軌跡(4)の角度変位に関して非反復の様式で変化する原点からの半径をもつ軌跡を決める段階;そして予期する位置が決まった軌跡に沿った点に実質的にワークピースに関して場所付けられるようにそれぞれのフィデューシャルマーカの2つあるいはそれ以上の予期する位置を選択する段階。 (もっと読む)
ロボットおよびロボットを登録する方法
ロボット(40)が、器具または道具(46)を運搬する制御可能なアーム(43、44)を有する。ロボット(40)は、加工対象物上に存在するマーカー(2)およびインジケーター(22)の画像を含む加工対象物の画像を取得するためのカメラ(45)を備える。ロボット(40)は、ロボット(40)の空間基準座標系内のマーカー(2)の位置を決定するために画像を処理する工程を有する。ロボット(40)は、加工対象物に対して相対的にアーム(43、44)が運搬する器具または道具(46)の既定の動きを実行するため制御される。マーカー(2)が隠れているときにインジケーター(22)の位置を決定しロボット(40)の空間基準座標系内のインジケーター(22)の動きに反応して、インジケーター(22)の新しい位置およびそれにより加工対象物の新しい位置を決定するため、さらにプロセッサーが配置される。その後ロボット(40)は、加工対象物の新しい位置に対して相対的に制御され、加工対象物に対して相対的に既定の動きを実行する。 (もっと読む)
1 - 8 / 8
[ Back to top ]