
キヴァ システムズ,インコーポレイテッドにより出願された特許
11 - 20 / 21
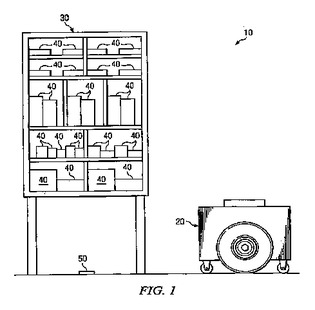
在庫品目を輸送するためのシステム及び方法
在庫品目を輸送するための装置は、ハウジングと、駆動モジュールと、合体モジュールと、昇降シャフトと、回転モジュールとを含む。駆動モジュールは、装置を少なくとも第一方向に推進し得る。合体ヘッドは、在庫ホルダに結合し或いは支持し得る。回転モジュールは、昇降シャフトに対してハウジング内で回転を誘発し得る。昇降シャフトは、合体ヘッドに接続し、ハウジングが昇降シャフトに対して回転されるときに、合体ヘッドを上昇し得る。  (もっと読む)
(もっと読む)
ステータス情報を通信するためのシステムおよび方法
【解決手段】
タスクに関連する情報を通信するための方法であって、無線で第1のステータス情報を受信するステップを含む。第1のステータス情報は、タスクと関連づけられた第1のステータスを特定する。本方法は、また、ユーザに第1のステータスを示すステップ、および、タスクと関連づけられた第2のステータスを示すユーザからの入力を受信するステップを有する。加えて、本方法は、ユーザからの入力の受信に応答して、無線で第2のステータス情報を遠隔装置に送信することを含む。第2のステータス情報は、第2のステータスを特定する。 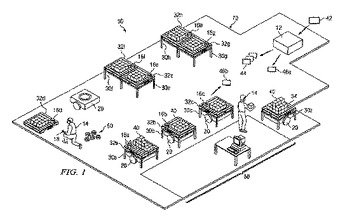 (もっと読む)
(もっと読む)
オーダーを遂行するシステム及び方法
在庫要求を遂行する方法は、在庫物品を要求する在庫要求を受信する段階、及び要求された在庫物品を在庫ホルダから選択する段階を有する。当該方法は更に、要求された在庫物品を在庫要求に関連付けられるオーダーホルダにおいて格納する段階、及び該オーダーホルダを格納スペースまで動かす段階を有する。更には、当該方法は、トリガイベントを検出する段階、及び該トリガイベントを検出する段階に応じてオーダーホルダを格納スペースから取り出す段階を有する。  (もっと読む)
(もっと読む)
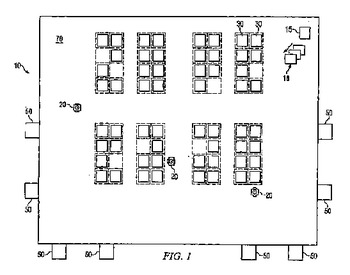
目録品を移送するシステムおよび方法
目録品を移送する方法が、移動駆動ユニットを作業スペース内の第一の点に移動させることを含む。第一の点は、目録品ホルダーの位置である。本方法はさらに、前記移動駆動ユニットを目録品ホルダーとドッキングさせ、前記移動駆動ユニットおよび前記目録品ホルダーを前記作業スペース内の第二の点に移動させることを含む。第二の点は、搬送設備に関連付けられている。本方法はさらに、前記目録品ホルダーを前記作業スペース内の第三の点に、前記搬送設備を使って移動させることを含む。
 (もっと読む)
(もっと読む)
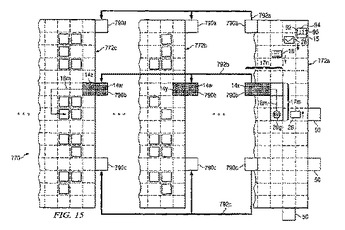
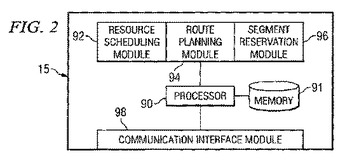
移動駆動ユニットのための経路を生成するシステムおよび方法
目録品を移送する方法が、ルート要求を移動駆動ユニットから受信する。ルート要求は、作業スペース内のある行き先位置を指定している。作業スペースは、第一のセル属性に関連付けられた少なくとも一つのセルおよび前記第一のセル属性に関連付けられていない少なくとも一つのセルを含む。本方法は、移動駆動ユニットの状態を判定する段階を含む。本方法はまた、前記移動駆動ユニットが第一の状態に関連付けられていると判定するのに応答して、前記移動駆動ユニットのための、前記第一のセル属性に関連付けられたセルを通る、前記行き先位置への経路を生成することを含む。本方法は、前記移動駆動ユニットが前記第一の状態に関連付けられていないと判定するのに応答して、前記移動駆動ユニットのための、前記第一のセル属性に関連付けられたセルを通らない、前記行き先位置への経路を生成する段階を含む。本方法はさらに、前記経路を前記移動駆動ユニットに送信する段階を含む。
 (もっと読む)
(もっと読む)
移動駆動ユニットを操るシステムおよび方法
目録品ホルダーを回転させる方法は、目録品ホルダーを、経路の直線セグメントに沿って、目録品ホルダーの第一の面を第一の方向に向けつつ回転領域に向けて動かすことを含む。回転領域は目録品ホルダーの回転のために指定された作業スペースの一部分を含む。本方法はさらに、目録品ホルダーを、第一の弧状のセグメントに沿って、前記第一の面を前記第一の弧状のセグメントに垂直にした配向で、回転領域中に動かすことを含む。本方法はさらに、回転領域内における回転機動を実行し、目録品ホルダーを、第二の弧状のセグメントに沿って、第二の面を前記第一の方向に向けつつ、回転領域の外に動かすことを含む。
 (もっと読む)
(もっと読む)
移動駆動ユニットを管理するシステムおよび方法
作業スペース内で移動駆動ユニットを動かす方法が経路を受信することを含む。経路は少なくとも初期セグメントおよび一つまたは複数の追加的セグメントを含む。前記初期セグメントは前記第一の点に隣接する前記経路の部分を含み;前記追加的セグメントの少なくとも一つは、前記第二の点に隣接する前記経路の部分を含む。本方法はさらに、前記経路を記憶する段階と、前記経路の前記初期セグメントを予約する段階と、前記初期セグメントに沿って前記第一の点から離れていく段階とを含む。前記初期セグメントに沿っての移動を開始した後に、本方法は、前記経路の前記追加的セグメントのそれぞれを予約し、前記第二の点に向かって前記追加的セグメントの各セグメントに沿って、そのセグメントが予約されている間に、移動することを含む。
 (もっと読む)
(もっと読む)
移動駆動ユニットの動きを調整するシステムおよび方法
一つまたは複数の移動駆動ユニットを作業スペース内で動かす方法が、第一の移動駆動ユニットから、第一の方向に動くために第一の経路セグメントの使用を要求する予約要求を受信する段階を含む。本方法はさらに、前記第一の経路セグメント上に第二の移動駆動ユニットが現在位置されていることを判定する段階と、前記第二の移動駆動ユニットが前記第一の方向に動いているかどうかを判定する段階とを含む。さらに、本方法は、前記第二の移動駆動ユニットが前記第一の方向に動いているのではないと判定するのに応答して、前記予約要求が拒否されることを示す予約応答を送信する段階を含む。本方法はまた、前記第二の移動駆動ユニットが前記第一の方向に動いていると判定するのに応答して、前記予約要求が承認されることを示す予約応答を送信する段階を含む。
 (もっと読む)
(もっと読む)
移動駆動ユニットを位置させるシステムおよび方法
目録品を移送する方法が、移動駆動ユニットの割り当て状態を判定することを含む。本方法はまた、前記移動駆動ユニットが現在、タスクを完了させつつあるのではないと判定するのに応答して、前記移動駆動ユニットの前記割り当て状態に基づいて前記移動駆動ユニットについてある位置を選択することも含む。本方法はさらに、選択された位置を同定する情報を前記移動駆動ユニットに送信することを含む。
 (もっと読む)
(もっと読む)
在庫品目を輸送する方法及びシステム
在庫品目を輸送するためのシステムは、在庫品目を貯蔵し得る在庫ホルダと、移動式駆動ユニットとを含む。移動式駆動ユニットは、移動式駆動ユニットに連結され且つ移動式駆動ユニットによって支持される少なくとも1つの在庫ホルダと共に第一地点に移動し得る。移動式駆動ユニットは、追加的に、在庫ホルダの位置を決定し、在庫ホルダの場所と第一地点との間の差を計算し得る。移動式駆動ユニットは、次に、差が所定の公差よりも大きいか否かを決定し得る。差が所定の公差よりも大きいという決定に応答して、移動式駆動ユニットは、在庫ホルダの場所に基づき第二地点に移動し、在庫ホルダと結合し、且つ、移動式駆動ユニット及び在庫ホルダを第一地点に移動し得る。
 (もっと読む)
(もっと読む)
11 - 20 / 21
[ Back to top ]