
テナント カンパニーにより出願された特許
1 - 10 / 17
荷電活性化液を組み込む洗浄システム
洗浄システム(10、110、210、510、610、710、810)ならびに荷電活性化液を形成すること、及び荷電活性化液とで洗浄システム(10、110、210、510、610、710、810)を作動させることを含む方法。  (もっと読む)
(もっと読む)
強化された浮遊特性を有する液体を通じて電荷を印加する方法および装置
装置(10、50、80、300、500、1200、1300、1400、1500、1700、1810)および方法が提供される。方法は、たとえば、液体の浮遊特性を向上させるために装置内の液体を処理するステップと、装置から表面または容積空間への被処理液によって導電経路を造り出すように、装置から表面または容積空間に被処理液(250、302、306、308、1414、1504、1917)を分配するステップと、を含む。分配ステップの間、導電経路に沿った液体を通じて、装置から表面または容積空間までの交流電場(E)が発生し、電場は表面からの、または容積空間内の少なくとも1つの微生物(256)を破壊するのに十分である。  (もっと読む)
(もっと読む)
消毒特性を強化するために液体を通じて電荷を印加する方法および装置
エレクトロポレーション電極(35、1614、1714、1828)が、たとえば装置から処理される表面または容積(252、304、1506)に分配される液体(250、302、306、308、1414、1504、1917)を通じて交流電場(E)を印加し、それによって液体と接触している微生物(256)のエレクトロポレーションを引き起こすように構成されている装置(10、50、80、300、500、1200、1300、1400、1500、1700、1810)および方法が提供される。液体は、微生物に対する電場(E)の印加を強化するために、帯電したナノバブルおよび/またはその他の機構によって、表面から浮遊されてもよい。 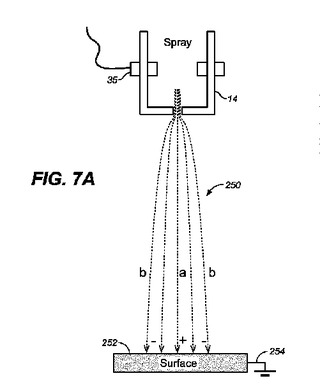 (もっと読む)
(もっと読む)
電解セル及び液体を通して点灯するインジケータライトを有する装置
電解セル(18、50、80、406、552、708、804)、電解セル(18、50、80、406、552、708、804)を通過する液体流路及びインジケータライト(414、416、594、596)を含む装置(10、400、500、500′、700、800、980)が提供される。インジケータライト(414、416、594、596)は、電解セル(18、50、80、406、552、708、804)の作動特性の関数として点灯され、ライト(414、416、594、596)から放出される光束(522)が流路の少なくとも一部分に沿って液体を照らす。  (もっと読む)
(もっと読む)
手持ち式スプレーボトル電解セルおよび直流・直流変換器
液体リザーバ(12,52,88,510)と、液体出口(14,74,89,508)と、電解セル(18,50,80,406,552,708,804)と、電源(32,402,542)と、直流・直流変換器(1004)とを含む手持ち式スプレーボトル(10,400,500,500’)が提供される。電解セル(18,50,80,406,552,708,804)は、スプレーボトル(10,400,500,500’)によって支えられ、リザーバ(12,52,88,510)と液体出口(14,74,89,508)との間に流体的に連結されている。電源(32,402,542)は、スプレーボトル(10,400,500,500’)によって支えられ、電圧出力を有する。直流・直流変換器(1004)は、電圧出力と電解セル(18,50,80,406,552,708,804)との間に連結され、そして電解セル(18,50,80,406,552,708,804)を活性化するため電源(32,402,542)の電圧出力より大きいステップアップ電圧を供給する。 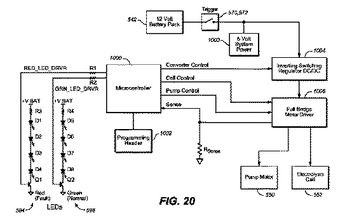 (もっと読む)
(もっと読む)
同心電極を含む管状電解セルおよび対応する方法
入口(12、63、65)、出口(36、63、65)、および同軸円筒状の内側電極および外側電極(20、22)を含む電解セル(10)が提供される。内側電極と外側電極(20、22)との間に円筒状のイオン選択性膜(18)が置かれ、この膜(18)の対向する側に、第1および第2の電解反応室(14、16)が形成される。第1および第2の室(14、16)に沿った流体流路は、入口(12、63、65)を通過する結合入口流路(70)および出口(36、63、65)を通過する結合出口流路(72)として合流する。  (もっと読む)
(もっと読む)
種々のサイズ/形状をもつアパーチャを備える電極を有する電解セル
アノード電極およびカソード電極(60,62,84,86,100,104,108,204,206)を含む電解セル(18,50,80,406,552,708,804)が提供される。アノード電極またはカソード電極のうちの少なくとも一つ(60,62,84,86,100,104,108,204,206)は、第1のサイズおよび/または形状を有している第1の複数のアパーチャ(102,106,110)と、第2の異なったサイズおよび/または形状を有している第2の複数のアパーチャ(102,106,110)とを含む。  (もっと読む)
(もっと読む)
一定出力をもつ電解スケール除去方法
イオン選択性膜(58,208)によって分離されたアノードおよびカソード(60,62,84,86,100,104,108,204,206)を有する電解セル(18,50,80,406,552,708,804)の中に水を通す方法および装置(10,400,500,500’,700,800,980)が提供される。カソードはアノードより大きい表面積を有している。この方法は、陽極液および陰極液(70,72,76)を生成するため、アノードおよびカソード(60,62,84,86,100,104,108,204,206)に第1の極性(300)で活性化電圧を印加するステップと、アノードまたはカソード(60,62,84,86,100,104,108,204,206)のうち少なくとも一つへの堆積物を減らすため、短期間(302)に亘って活性化電圧を第2の極性へ一時的に反転させ、その後、活性化電圧を第1の極性(300)へ戻すステップと、印加ステップおよび反転ステップの間に、単位時間当たりの陰極液の供給が陽極液の供給より多量である実質的に定量供給のアノード室(54)からの陽極液およびカソード室(56)からの陰極液を吐出するステップと、を含む。  (もっと読む)
(もっと読む)
床の機械及びRFIDタグの場内での表面の清掃
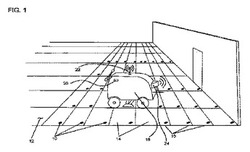
RFIDシステムを有する床清掃機械にて床の場を横断することにより、また、床の場内にて複数のRFIDタグにアクセスすることにより、清掃期間の間、床の場内にて清掃機械の位置を測定するため使用される、機械及び方法である。電子的マップを床清掃機械にて生成させ且つ(又は)保存し、又は、床の清掃期間の間、遠隔的にアクセスすることができる。RFIDシステムからの機械の位置の情報と組み合わせて、清掃期間の間、機械の作動特徴及び(又は)性能に関係する多様な情報を収集することができる。 (もっと読む)
床清掃機械を使用する受動型マッピング法

床の清掃過程の間、床の場内に分散させた複数のRFIDタグと関係した位置情報を決定する受動型のマッピングシステムを有する床清掃機械である。該受動型のマッピングシステムは、複数のRFIDタグから収集した位置情報に基づいて床のマップを規定する。床のマップは、遠方のサーバーに通信し且つ異なる床の清掃過程の間、第二の床清掃機械により利用することができる。マッピングシステムは、後続の床の清掃過程の間、収集した情報に基づいて床のマップを定期的に更新することができる。情報は、RFIDタグの移動又は交換を含むことができる。1つの実施の形態において、遠方のマッピングシステムは、無線通信を介して床清掃機械と通信する。 (もっと読む)
1 - 10 / 17
[ Back to top ]