
サントル・ナシオナル・ドウ・ラ・ルシエルシユ・シアンテイフイク(エタブリスマン・ピユブリツク・ア・キアラクテール・シアンテイフイク・エ・テクノロジーク)により出願された特許
1 - 2 / 2
ビジュアルサーボ制御式の可撓性内視鏡装置およびこのような装置の安定化方法
本発明は、内視鏡のヘッドを支持もしくは形成し、光学システムを備えて、互いに垂直な少なくとも2つの方向に湾曲もしくは撓むことが可能な、可撓性の端部区間を有する細長い柔軟な本体を含み、この細長い本体がその他端で、少なくとも上記端部区間の動きおよび/または構成を制御可能な制御手段に機能的に接続されている、可撓性の内視鏡装置を目的とする。この装置(1)は、また、ビジュアルサーボ制御により端部区間(3)を撓ませて自動的に位置決めする手段を含み、これらの手段が、主に、内視鏡のヘッド(3’)の光学システム(4)により供給されるビデオ画像またはビデオ信号を受信するビデオ処理手段(6)と、処理されたビデオ信号に基づいてビジュアルサーボ制御操作を実施可能で制御信号を供給する情報処理手段(7)と、端部区間(3)を制御可能な制御手段(6)の一部をなすかもしくはこの手段に結合されて情報処理手段(7)により供給される制御信号を受信するアクチュエータ手段(8、8’)とから構成されることを特徴とする。  (もっと読む)
(もっと読む)
構成部品または器具を位置決めおよび移動するためのロボット化された装置およびそのような装置を含む治療装置
患者の頭部の領域またはその周りで、診断または外科治療のための構成部品または器具を、ガイドおよび制御しながら位置決めおよび移動するためのロボット化された装置が提供され、前記装置は、一連の運動連鎖を生成し、その自由端であり制御された端部に、上記の構成部品または器具を担持する、ロボットデバイスを含む。装置1は、前記ロボットデバイス5が、互いに連続して連結された3つの運動サブアセンブリ7、7’、7”から構成され、1つには、回転関節を有する機構の形態であり、3自由度の連続様式の球面運動配置に対応し、関節要素すべてが患者を収容するための容積の外部に置かれ、それらの回転軸が治療位置にある患者の頭部の仮定中心にほぼ対応する焦点と同一点で交わる、第1のサブアセンブリ7と、もう1つには、焦点を通る軸に沿って線形並進するための機構の形態である第2のサブアセンブリ7’と、最後に、回転関節を備えた第2の機構の形態であり、第2のサブアセンブリ7’の可動部分と一体に連結されており、3自由度の連続様式の球面運動配置とも対応する第3のサブアセンブリ7”とを含むことを特徴とする。 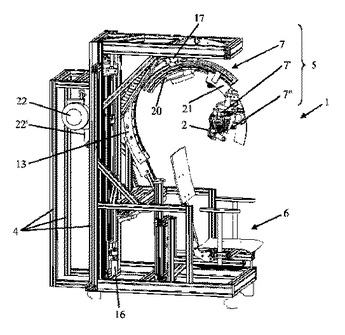 (もっと読む)
(もっと読む)
1 - 2 / 2
[ Back to top ]