
有限会社レプトリノにより出願された特許
1 - 10 / 10
パラレルリンク機構および駆動ステージ
【課題】パラレルリンク機構のテーブルの位置精度を向上する。
【解決手段】パラレルリンク機構1は、ベース2と、ベース2に対して6自由度を有し、ベース2と対向して配置されるテーブル3と、一端がベース2に取り付けられ、他端がテーブル3に取り付けられる伸縮可能なロッド4を有する複数の連結部10と、テーブル3の位置の算出に用いる複数のセンサ部14とを備えている。センサ部14は、一端がベース2に取り付けられ、他端がテーブル3に取り付けられるワイヤ12と、ワイヤ12の長さを計測するセンサ13とを有している。
(もっと読む)
力覚または運動センサ

【課題】感度及び信頼性が高く、構造がより簡単で製造コストの安価な力覚または運動センサを提供する。
【解決手段】本発明による力覚または運動センサにおいては、センサを保持し固定するためのベース1と、6自由度方向の応力に感応するよう構成され前記ベースと対向して配置されたテーブル30と、前記ベースと前記テーブルとの間に配置され前記応力に対応して動作する動作部と、前記動作部の変位及び/または変形を検出する複数の検出素子と、前記各々の検出素子の変位及び/または変形量を総合的に計算する演算部とからなるセンサにおいて、前記動作部は放射状に配置された複数の感応アーム10と、これらアームと一体化されたアームより厚いボス部25とからなる。
(もっと読む)
力覚センサ
【課題】力覚センサの検出精度を向上する。
【解決手段】連結部10は、テーブル3の可動を受ける軸受け部6と、軸受け部6の可動を受ける軸受け部7と、一端が軸受け部6と接続され、他端が軸受け部7と接続されたロッド4と、一端が軸受け部7と接続され、他端がベース2と固定されたアーム5とを有している。アーム5は、ベース2、テーブル3およびロッド4より弾性が高いものである。力覚センサ1は、複数の連結部10のアーム5のそれぞれに対して、アーム5の変形を一方向で検出する複数の検出素子9と、複数の検出素子9の検出値からキャリブレーションを行ってテーブル3に作用する6成分を計算する演算部を含む回路基板11とを備えている。
(もっと読む)
力覚センサ
【課題】力覚センサの検出精度を向上する。
【解決手段】連結部は、テーブルの可動を受ける3自由度を有する軸受け6と、軸受け6の可動を受ける2自由度を有する軸受け7と、一端が軸受け6と接続され、他端が軸受け7と接続されたロッド4とを含んでいる。軸受け6および軸受け7は、ジャーナル11と、ジャーナル11を受けるレース12と、ジャーナル11とレース12とを固定するように、ジャーナル11とレース12との間に挟まれた弾性体8とを有している。ジャーナル11は球状の鋼球であり、レース12は球状のジャーナル11を包む形状をしている。
(もっと読む)
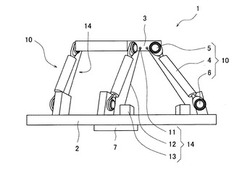
閉リンク機構およびそれを備えた力覚センサ
【課題】閉リンク機構の機能を向上することができる技術を提供する。
【解決手段】連結部10Aが、テーブル3に設けられ、テーブル3の可動を受ける多自由度を有するジョイント12と、ひも11を介してジョイント12の可動を受ける多自由度を有するジョイント13と、一端にジョイント13が設けられ、他端でベース2と固定されたアーム14と、ジョイント12を介してテーブル3と接続され、ジョイント13を介してアーム14と接続されて、ジョイント12とジョイント13との間に張設されたひも11と、を含んでテーブル3とベース2とを連結している。
(もっと読む)
力センサ試験装置
【課題】被試験体である力センサに対して6軸方向に加重試験できる力センサ試験装置を提供する。
【解決手段】試験装置101は、被試験体である力センサ113を載置可能なステージ120と、ステージ120を介して力センサ113をX・Y・Z軸の各軸回転の6方向に移動可能な駆動部130と、ステージ120上に載置された力センサ113に加重可能な加重部140と、を備えている。加重部140は、ステージ120上に載置された力センサ113の上部に取り付けられる取り付け治具107と、取り付け治具107から水平方向に引き出されるように張設された4本のワイヤ108と、ワイヤ108を水平方向から鉛直方向に変換可能な滑車部150と、ワイヤ108の先端に取り付けられた錘110と、を含んでいる。
(もっと読む)
力覚センサ
【課題】複数のベクトル量を検出できるセンサを提供する。
【解決手段】力覚センサ201では、テーブル203の可動を受ける3自由度を有する軸受け206と、軸受け206の可動を受ける2自由度を有する軸受け207と、ベース202に固定され、軸受け207の可動を受けるアーム205と、一端が軸受け206と接続され、他端が軸受け207と接続されたロッド204と、を含んで、テーブル203とベース202とが連結されている。この力覚センサ201は、アーム205の変位および/または変形を検出する検出素子208と、検出素子208の検出値を成分とする行列Dから、力を示すベクトルFへ変換するための係数行列Gを用いて、
F=G・D
からテーブル203に作用する力の大きさおよび/または方向を計算する演算部を有する回路基板210と、を備えている。
(もっと読む)
力覚または運動センサおよびその製造方法
【課題】感度及び信頼性が高く、構造がより簡単で製造コストの安価な力覚または運動センサを提供する。
【解決手段】ベース2と、ベース2に対して6自由度を有しベース2と対向して配置されたテーブル21と、ベースとテーブル21とを連結するよう並列配置された6つの連結部と、ベース2とテーブル21との間の変位及び/または変形を検出する複数の検出素子と、各々の検出素子の変位及び/または変形量を総合的に計算する演算部とからなるセンサにおいて、各連結部のテーブル側第1軸受12はテーブル21裏側より嵌合するよう構成されており、テーブル21に固定される押圧板22とテーブル21とにより保持固定されている。
(もっと読む)
力覚センサおよび運動センサ
【課題】複数のベクトル量を検出できるセンサを提供する。
【解決手段】ベース102と、ベース102に対して6自由度を有し、ベース102と対向して配置されたテーブル103と、テーブル103とベース102とを連結する並列配置された6つの連結部104とを備えてセンサ101を構成する。ここで、連結部104は、テーブル103の可動を受ける3自由度を有する軸受け106と、軸受け106の可動を受ける2自由度を有する軸受け107と、ベース102に固定され、軸受け107の可動を受けるアーム105と、を含んでいる。さらに、センサ101は、アーム105の変位および/または変形を検出する静電容量素子108と、静電容量素子108の検出値から、テーブル103もしくはベース102に作用する力の大きさおよび/または方向を計算する演算部を有する回路基板110と、を備えている。
(もっと読む)
センサ
【課題】複数のベクトル量を検出できるセンサを提供する。
【解決手段】ベース102と、ベース102に対して6自由度を有し、ベース102と対向して配置されたテーブル103と、テーブル103とベース102とを連結する並列配置された6つの連結部104とを備えてセンサ101を構成する。ここで、連結部104は、テーブル103の可動を受ける3自由度を有する軸受け106と、軸受け106の可動を受ける2自由度を有する軸受け107と、ベース102に固定され、軸受け107の可動を受けるアーム105と、を含んでいる。さらに、センサ101は、アーム105の変位および/または変形を検出する静電容量素子108と、静電容量素子108の検出値から、テーブル103もしくはベース102に作用する力の大きさおよび/または方向を計算する演算部を有する回路基板110と、を備えている。
(もっと読む)
1 - 10 / 10
[ Back to top ]