
コンチネンタル・エンジニヤリング・サービス・ゲゼルシヤフト・ミツト・ベシユレンクテル・ハフツングにより出願された特許
1 - 2 / 2
交通にとって重要な情報を認識するための方法及び装置
走行する車両において交通にとって重要な情報(I)を認識するための方法において、センサ(3)のセンサデータ(B)とナビゲーションシステム(4)のカードデータ(K)が認識のために解釈され、センサデータ(B)が、第1の光景解釈部(10)において、含まれている交通にとって重要な情報(I)を探索されて、重要なセンサデータ(Br)に圧縮され、カードデータ(K)が、第2の光景解釈部(20)において、含まれている交通にとって重要な情報(I)を探索されて、関係するカードデータ(Kr)に圧縮され、重要なセンサデータ(Br)及び重要なカードデータ(Kr)が、センサデータ及びカードデータを解釈する制御機構(40)へ送られ、制御機構(40)がセンサデータ(Br)及びカードデータ(Kr)を評価し、それにより評価に一致する出力信号を出力する。 (もっと読む)
交通にとって重要な情報を認識する方法及び装置

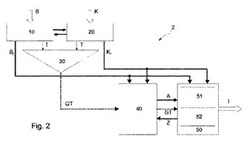
走行する車両において交通にとって重要な情報(I)を認識する方法及びこの方法を実施するために設けられる装置において、視覚センサ(3)の画像データ(B)及びナビゲーションシステム(4)のカードデータ(K)が、認識のためそれぞれ予め評価され、前評価の結果が集められて解釈される。信号の速やかなモジュール処理を可能にするため、 第1の光景解釈部(10)において画像データ(B)が、含まれる交通にとって重要な情報(I)を探索されて、重要な画像データ(Br)に圧縮され、
第2の光景解釈部(20)においてカードデータ(K)が、含まれる交通にとって重要な情報(I)を探索されて、重要なカードデータ(Kr)に圧縮され、
重要な画像データ(Br)及び重要なカードデータ(Kr)が、制御機構(40)と画像データ及びカードデータを解釈する状態オートマトン(50)とへ供給され、制御機構(40)が重要な画像データ(Br)及び重要なカードデータ(Kr)を評価し、かつ実行すべき動作(A)を状態オートマトン(50)へ転送し、実行すべき動作(A)に基いて状態オートマトン(50)が予め規定された状態(Z)を持つ状態空間において移行を行い、この状態(Z)又は移行に対応する情報(I)を出力する。
(もっと読む)
1 - 2 / 2
[ Back to top ]