
ノヴァテル インコーポレイテッドにより出願された特許
1 - 6 / 6
低コスト1周波GNSS受信機を使用するセンチメートル精度の測位方法
全地球測位システムは、視野内のGNSS衛星群に対応する位置及び搬送波位相測定値群を求める基地局GNSS受信機と、移動局GNSS受信機とを含み、移動局GNSS受信機は1周波受信機であり、この1周波受信機は、複数のGNSS衛星から1つの周波数帯で、捕捉窓の長さに亘って送信されるGNSS衛星信号を捕捉し、複数のGNSS衛星は、搬送波位相データセットを供給するために十分多くの衛星であり、搬送波位相データセットから、関連する搬送波位相整数アンビギュイティの解が多元決定される。システムはこれらの捕捉信号から、視野内のこれらの衛星、コード位相遅延群及び関連する位置不確定性に関連する探索空間を決定する。システムはこれらの搬送波位相整数アンビギュイティを、所定の閾値を上回る信号電力値に関連する搬送波位相二重差測定値群を使用して決定する。システムはこれらの搬送波位相整数アンビギュイティを、捕捉窓の長さに亘って唯一の解セットとして決定し、移動局GNSS受信機の位置を数センチメートル以内の精度で、決定された搬送波位相測定値群を使用して求める。  (もっと読む)
(もっと読む)
短基線位相マップ及び超短基線位相マップ
1つ以上の位相差誤差マップ、テーブル、及び/又は数学モデルから成るルックアップメカニズムを生成し、利用するシステムは、それぞれのマップ、テーブル、及び/又はモデルを、短基線または超短基線アンテナアレイを既知の位置に、かつ既知の姿勢に配置し、アンテナアレイに対する到来GNSS衛星信号の入射角を求め、各アンテナペアの間の予測搬送波位相差を算出し、各アンテナペアの間の測定搬送波位相差を算出し、搬送波位相差誤差を、予測搬送波位相差及び測定搬送波位相差を使用して求めることにより算出する。次に、これらの搬送波位相差誤差を、マップを含み、必要に応じてルックアップテーブルを含むルックアップメカニズムに記録して、それぞれのアンテナペアに、入射角でインデックス付けする。その後、システムはルックアップメカニズムを、アンテナ構造の未知の姿勢を求める場合に利用する。各アンテナペアに関してシステムはルックアップメカニズムへの入力を、算出姿勢から求めた入射角に応じて行ない、取り出した値を補正姿勢の算出に使用して位相歪みを補正する。  (もっと読む)
(もっと読む)
超短基線GNSS受信機
GNSS受信機は、2つ以上のアンテナを、これらのアンテナに隣接するアンテナから、注目するGNSS衛星搬送波信号の1波長よりも短い距離だけ離間させる構成のアンテナ構造を利用する。当該受信機は、これらのアンテナの姿勢を、2つのアンテナで測定される搬送波位相角の差から直接算出し、搬送波位相整数アンビギュイティを決定する必要がない。  (もっと読む)
(もっと読む)
初期測位時間を短縮するために便宜通信信号および支援情報を使用するGNSSレシーバ
GNSSレシーバは、発振器の周波数における不確定性および発振器が駆動するクロックの位相における不確定性に伴う不確定性を低減するために、既存の放射される便宜通信信号(signals of opportunity)、例えば、AMラジオ信号またはFMラジオ信号、テレビジョン信号の特性を利用し、さらに、ドップラ効果に伴う不確定性を低減するために、保存されたアルマナック(軌道衛星情報)およびバッテリバックアップされた日時情報の形の支援情報を利用する。レシーバは複数の便宜通信信号を用いて、信号の周波数のセットに基づいてレシーバが位置する市または領域を決定し、また、レシーバにおける各便宜通信信号の周波数と、便宜通信信号の基準周波数との差に基づいてオフセットを推定することにより、発信機の周波数に関する不確定性を低減する。 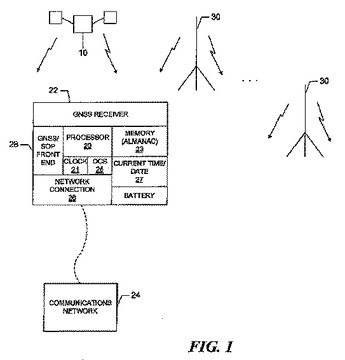 (もっと読む)
(もっと読む)
ネットワークにわたって位置を定めるためのシステム
位置が知られている1つまたは複数の送信機によって送信された機会信号を用いて、ネットワークにわたって位置、周波数およびクロックオフセットを定めるためのシステムであって、当該システムは以下のものを含んでおり:すなわち、基地受信機を有しており、当該基地受信機はクロックおよび既知の位置を有しており、前記送信機までのレンジを定め、機会信号の一連のサンプルを採取し、当該一連のサンプルに受信時間、計算されたレンジに基づいて計算された送信時間、またはその両方でタイムタグを付ける。基地受信機は、一連のタイムタグが付されたサンプルと、必要に応じて、計算されたレンジを遠隔受信機に伝送する。所与の遠隔受信機は、機会信号のサンプルを格納し、タイムタグを付け、タイムタグが付された一連のサンプルを、格納されたサンプルと相関させ、タイムオフセットを、遠隔受信機での受信時間と、基地受信機での受信時間または基地受信機で計算された送信時間の1つまたは両方との差として計算する。遠隔受信機は位置を、当該タイムオフセットと、必要に応じて、基地受信機によって提供されたレンジに基づいて計算する。遠隔受信機の高さが、位置計算の一部として計算されてもよい。これは、Z座標を平均的な高さに強制することに基づいて反復して定められる、または、基地受信機と遠隔受信機での気圧センサ示度における差から定められる。 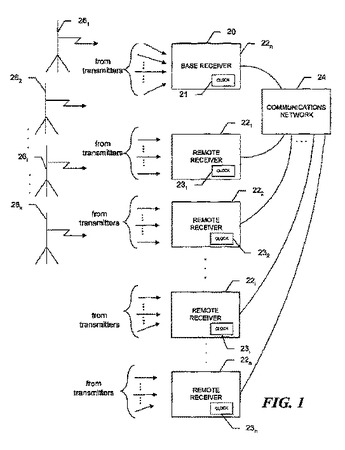 (もっと読む)
(もっと読む)
正確な時間および周波数をネットワークにわたって分配するためのシステムおよび方法
位置が知られている1つまたは複数のローカル送信機によって送信された機会信号を用いてネットワークにわたって正確な時間および/または周波数を分配するためのシステムであって、当該システムは基地受信機を有しており、この基地受信機はGNSSまたはUTC時間等の基準時間スケールに同期されたクロックを有しており、基地受信機は機会信号の一連のサンプルを格納し、この一連のサンプルに、計算された放送時間でタイムタグを付す。遠隔受信機は、前記機会信号のサンプルを格納し、この一連のサンプルを、格納されているサンプルと相関させる。遠隔受信機は、一連のサンプルに相当する、前記格納されたサンプルの伝送時間を計算し、遠隔受信機で計算された放送時間と基地受信機で計算された放送時間における差としてタイムオフセットを定め、基地受信機に関する時間オフセットを定める。前記基地受信機はさらに、または代わりに、機会信号に位相ロックし、所定の間隔で、積分された機会信号の搬送周波数の位相測定値を定め、位相情報を遠隔受信機に提供する。同じ機会信号へ位相ロックされている遠隔受信機は、位相測定値情報を使用して、基地受信機および遠隔受信機で形成された位相測定値の変化率に基づいて周波数エラーを定めることによって自身のクロックを基地受信機クロックへ周波数ロックする。  (もっと読む)
(もっと読む)
1 - 6 / 6
[ Back to top ]