
プレシテック アイテーエム ゲーエムベーハーにより出願された特許
1 - 3 / 3
レーザ加工ヘッドおよびレーザ加工ヘッドの焦点位置の変化を補償するための方法
本発明は、加工レーザビーム108により工作物を機械加工するためのレーザ加工ヘッド100に関し、このヘッド100は、カメラ102を備え、ビーム経路内において前記カメラの正面に撮像レンズユニット116が、工作物レーザビーム108により機械加工される工作物の機械加工領域を監視するために配置され、更に工作物表面104上又は該表面104に対し規定された位置の上に加工レーザビーム108の焦点合わせのためのフォーカシングレンズユニット114と、集束レンズ系114の焦点シフトが生じた場合にカメラ画像の焦点を再度合わせるための光学軸方向の撮像レンズ系116の調節移動量ΔdKLを用いて補正調節移動量ΔzOS、ΔzBを計算するように設計された評価ユニット122とを備え、この補正調節移動量が工作物表面104又は該表面104に対して規定された位置に対する集束レンズ系114の焦点変位を補償する。  (もっと読む)
(もっと読む)
工作物に対して実施されるべきレーザ加工作業をモニタリングするための方法および装置、ならびにかかる装置を有するレーザ加工ヘッド
本発明は、工作物に対して実施されるべきレーザ加工作業をモニタリングするための方法に関し、前記レーザ加工作業をモニタリングする少なくとも1つのセンサにより、少なくとも2つの現時点における測定値を検出するステップと、前記少なくとも2つの現時点における測定値から少なくとも2つの現時点における特徴を決定するステップであって、前記少なくとも2つの現時点における特徴が一緒になって特徴空間内の現時点におけるフィンガプリントを表す、ステップと、前記特徴空間内に所定の点集合を与えるステップと、前記特徴空間内の前記所定の点集合に対する前記現時点におけるフィンガプリントの位置を検出することにより前記レーザ加工作業を分類するステップと、を含む。 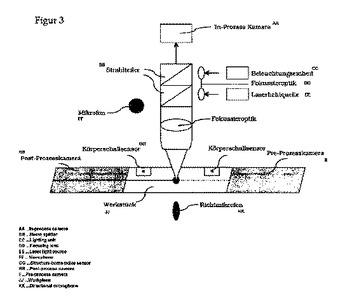 (もっと読む)
(もっと読む)
工作物に対して実施されるべきレーザ加工作業をモニタリングするための方法および装置、ならびにかかる装置を有するレーザ加工ヘッド
本発明は、工作物に対して実施されるべきレーザ加工作業をモニタリングするための方法に関し、前記レーザ加工作業をモニタリングする少なくとも1つのセンサにより、少なくとも2つの現時点における測定値を検出するステップと、前記少なくとも2つの現時点における測定値から少なくとも2つの現時点における特徴を決定するステップであって、前記少なくとも2つの現時点における特徴が一緒になって、特徴空間内の現時点におけるフィンガプリントを表す、ステップと、前記特徴空間内に所定の点集合を与えるステップと、前記特徴空間内の前記所定の点集合に対する前記現時点におけるフィンガプリントの位置を検出することにより前記レーザ加工作業を分類するステップであって、前記少なくとも1つのセンサは、様々に異なる露光時間で複数のカメラ画像を記録し、高ダイナミックレンジ(HDR)方法を利用して前記カメラ画像を相互に処理することにより、現時点における測定値としての高コントラスト比を有する画像を生成する、少なくとも1つのカメラユニットを備える、ステップと、を含む。 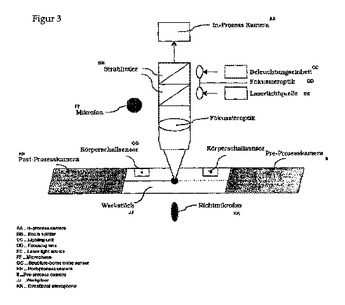 (もっと読む)
(もっと読む)
1 - 3 / 3
[ Back to top ]