
イリノイ インスティテュート オブ テクノロジーにより出願された特許
1 - 3 / 3
ロボット型ステッキ装置
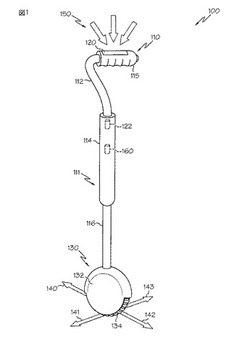
【課題】ユーザーの直立位置における歩行及び起立を能動的に援助するロボット型ステッキを提供する。
【解決手段】ロボット型ステッキ100は、グリップハンドル110と、グリップハンドル110から延在するステッキ本体111と、ステッキ本体111の第2端部に結合された動力付き全方向式ホイール134と、バランス制御センサと、コントローラモジュールと、を包含する。バランス制御センサは、ロボット型ステッキ100の向きに対応したバランス信号を供給する。コントローラモジュールは、バランス制御センサからバランス信号を受信し、且つ、バランス信号及び倒立振り子制御アルゴリズムに基づいて動力付き全方向式ホイール134のバランス速度を算出する。コントローラモジュールは、算出されたバランス速度に従って、動力付き全方向式ホイール134に駆動信号を更に供給可能であり、ロボット型ステッキ100を実質的に直立した位置に維持する。
(もっと読む)
ロボット型搬送装置及びシステム

【課題】車輪付き装置を自律的にピックアップ及び配送するロボット型搬送装置を提供する。
【解決手段】装置本体110と、2つのドッキングアーム120と、コントローラモジュールと、を含み、装置本体は、動力付き車輪112を包含し、且つ、2つのドッキングアームは、車輪ロック装置125を含み、装置本体から水平に延在し、第1及び第2方向に沿って調節可能でる。又車輪ロック装置は、ドッキングアームから横方向に延在する2つの調節可能な車輪止め126を有する。コントローラモジュールにより、ロボット型搬送装置100は、自律的に対象の装置に接近し、検出した装置タイプに従ってドッキングアーム及び車輪止めの位置を調節する。コントローラモジュールは、調節可能な車輪ロック装置を対象の装置の対象の車輪の真下に移動させて対象の車輪をロックし、持ち上げ、ロボット型搬送装置に対象の装置を自律的に搬送させることができる構成とする。
(もっと読む)
身体補助ロボット装置及びシステム
【課題】座、起立、及び歩行が制限された状態の人々に対して移動性を提供する身体補助ロボット装置及びシステムを提供する。
【解決手段】直立支持部材112を含むフレーム110と、直立支持部材と摺動可能に係合した横方向部材130と、横方向部材と摺動可能に係合したハンドル132と、直立支持部材及び横方向部材に結合した上昇アクチュエータ124と、横方向部材及びハンドルに結合した横方向アクチュエータ126と、を包含可能である。上昇アクチュエータが横方向部材を並進させると共に横方向アクチュエータがハンドルを並進させることにより、ユーザーを起立位置と非起立位置の間において移動させる構成とする。
(もっと読む)
1 - 3 / 3
[ Back to top ]