
株式会社演算工房により出願された特許
21 - 22 / 22
建設機械におけるブーム位置決め制御方法
【課題】ブームを作動させるサーボ機構を有しない、既存の建設機械に対して、位置決め制御機能を持たせるようにする。
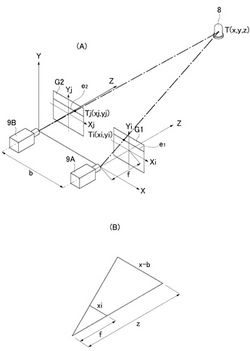
【解決手段】走行可能な台車14に対し、多関節ブーム11を介して、削岩機13を搭載したガイドシェル12を支持したドリルジャンボ1における穿孔位置決め制御方法であって、ガイドシェル12の少なくとも2箇所以上に発光ダイオード8A1、8B1を設けるとともに、前記ドリルジャンボ1上の少なくとも2箇所以上に撮像装置9A、9Bを夫々設け、穿孔前に、前記ドリルジャンボ1の座標及び姿勢、前記撮像装置9A、9Bの各設置座標を既知とした状態で、前記撮像装置9A、9Bの画像G1,G2に写る発光ダイオード8A1、8B1の座標を3次元画像処理によって求めることにより、前記ガイドシェル12の位置及び方向を計測し、前記削岩機13を所定の穿孔位置まで移動させる。
(もっと読む)
穿孔装置の穿孔位置決め方法及び建設機械の位置計測方法

【課題】中間に障害物が存在していても測量作業に支障を来すことがなく、かつ安価で穿孔装置の位置決めが行える制御方法を提供する。
【解決手段】走行可能な台車14に対し、多関節ブーム11を介して、削岩機13を搭載したガイドシェル12を支持したドリルジャンボ1における穿孔位置決め制御方法であって、ガイドシェル12の少なくとも2箇所以上に超音波発信器8A1、8B1を設けるとともに、前記ドリルジャンボ1上の少なくとも3箇所以上に超音波受信器9A〜9Cを夫々設け、穿孔前に、前記ドリルジャンボ1の座標及び姿勢、前記超音波受信器9A〜9Cの各設置座標を既知とした状態で、前記各超音波発信器8A1、8B1から発せられた超音波を前記各超音波受信9A〜9Cにより受信し、その到達所要時間から前記ガイドシェル12の位置及び方向を求め、前記削岩機13を所定の穿孔位置まで移動させるようにする。
(もっと読む)
21 - 22 / 22
[ Back to top ]