
株式会社演算工房により出願された特許
11 - 20 / 22
地層ガス濃度測定装置および地層ガス濃度測定方法
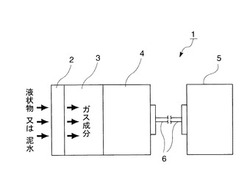
【課題】シールド掘進やボーリングによる地層の掘削を行いながら、地層内に含まれるガス成分の濃度を短時間で把握することができる地層ガス濃度測定装置および地層ガス濃度測定方法を提供する。
【解決手段】地層ガス濃度測定装置は、地層中の液状物から、または地層を掘削した土砂を含む泥水から、ガス成分を分離する気液分離部と、前記分離されたガス成分を保持するガス保持部と、測定開始後の経過時間に対応する前記ガス保持部内の前記ガス成分の内、目的とするガス成分に対してガス濃度を測定するガス濃度測定部と、前記ガス濃度測定部で測定された前記ガス濃度と、前記経過時間との関係から定まる前記ガス保持部内における前記ガス濃度の変化の傾向に基いて、前記地層中のガス濃度に対応する情報を求める地層ガス濃度対応情報求め手段と、を備えている。
(もっと読む)
位置座標の測量方法

【課題】誤差の分散化を図るとともに、測量による誤差累積を無くすことで、測量精度の安定と向上を図る。
【解決手段】グローバル系座標が予め既知とされる3点の基準点を、任意点に任意の姿勢で設置した測量機器1によりローカル系座標を測量する第1ステップと、前記ローカル系座標と、グローバル系座標との幾何学的関係に基づき、座標変換パラメータとなる回転行列及び並進ベクトルを求める第2ステップと、前記回転行列及び並進ベクトルを用いて、前記基準点のローカル系座標をグローバル系座標に変換した座標と、前記基準点のグローバル系座標との誤差の総和を最小にする修正回転行列と修正並進ベクトルとを最小二乗法によって求める第3ステップと、前記測量機器によって測量点のローカル系座標を測量し、前記修正回転行列及び修正並進ベクトルを用いてグローバル系座標に変換し前記測量点のグローバル系座標を求める第4ステップとからなる。
(もっと読む)
削岩機搭載台車における穿孔位置決め制御方法及びトンネル施工機械におけるブーム移動制御方法
【課題】サーボ機構を有しない既存の削岩機搭載台車に対し、大掛かりな改造を必要とすることなく極簡単に穿孔位置決め制御機構を持たせるようにする。
【解決手段】穿孔前に、前記削岩機搭載台車の座標及び姿勢状態を計測することにより、前記カメラ9A、9Bの設置座標及び向きを既知とし、切羽面を撮影しているカメラ映像を前記モニタ2に表示し、前記コンピュータ3からの信号により前記モニタ2上に、切羽削孔点P、P…をマーク表示するとともに、削孔姿勢に応じたガイドシェル12の後端部位置K、K…をマーク表示し、前記削岩機13の削孔ビット13aを前記切羽削孔点Pのマーク表示点に合わせるとともに、前記ガイドシェル12の後端部を前記ガイドシェル後端部位置Kのマーク表示点に合わせるようにガイドシェル12を移動制御する。
(もっと読む)
テールクリアランス自動計測システムおよびテールクリアランス自動計測方法
【課題】掘削作業を中断させることなくテールクリアランスをリアルタイムで計測する。
【解決手段】撮像手段10と、複数の基準位置と撮像手段10との離間距離と、基準高さと、基準高さに相当するピクセル数とから得られる撮像手段10固有のピクセル比Pfとを記憶する記憶手段21と、撮像手段10とセグメント4との離間距離を取得する離間距離取得手段22と、セグメント4の読取基準点Rに対応するピクセル値を読み取るピクセル値読取手段23と、読取基準点Rに対応するピクセル値と、スキンプレート3上の計測基準点3aに対応するピクセル値と、離間距離取得手段22で得られた離間距離と、ピクセル比Pfとから、テールクリアランスを算出するクリアランス演算手段24とを備えた。
(もっと読む)
トンネル壁面変位の表示方法およびそのプログラム
【課題】トンネル壁面の変位量を二次元的かつ経時的に把握できるようにするとともに、日常的な施工管理のためのA計測を兼ねることによって、施工コストの削減、施工効率の向上等を図り、かつトンネル内の作業者の安全を確保する。
【解決手段】トンネル坑内に設置されたトータルステーション5により、複数の内空断面形状計測箇所を経時的に繰り返して計測を行い、この内空断面測定結果について、初期の内空断面測定値と、その後の内空断面計測値との差分から各計測時における変位量を算出し、モニタ上に、変位量を任意に設定した等量線毎に区分するとともに、各等量線の範囲毎に色分けした展開図によって表示するとともに、該展開図を同一モニタ上において経時的順序で切り換えて表示する。
(もっと読む)
トンネル最終変位量の予測方法
【課題】掘削から初期計測までの時間変動が少なく、かつ施工重機の存在や支保構造の種別や有無等にあまり影響を受けずに、迅速に計測を行うことが可能であるとともに、任意の或いはすべての掘削断面に対して簡単に計測が可能で、しかも従来よりも安全かつ高い精度で最終変位量の予測が可能な方法を提供する。
【解決手段】トンネル坑内に設置された測距及び測角が可能なトータルステーション5により、掘削後の切羽面を対象としてトンネル延長方向の変位計測を行い、事前に保有しているトンネル延長方向の変位速度と最終変位量との相関データに基づき、最終変位量を予測する。
(もっと読む)
削岩機搭載台車における穿孔位置決め制御方法及び建設機械におけるブーム位置決め制御方法
【課題】既存の削岩機搭載台車に対し穿孔位置決め制御機能を持たせる。
【解決手段】ドリルジャンボ1に三次元スキャナー9を設置するとともに、コンピュータ2を設置し、コンピュータ2に予め、前記削岩機13及び/又はガイドシェル12の形状、寸法データを登録しておき、三次元スキャナー9により三次元点群データを取得し、コンピュータ2によって三次元モデルを生成するとともに、該三次元モデルと、予めコンピュータ2に登録された前記削岩機13及び/又はガイドシェル12の形状、寸法データとのパターンマッチングを行い、削岩機13及び/又はガイドシェル12を特定し、削岩機13及び/又はガイドシェル12の位置及び方向を把握する。また、削岩機13及び/又はガイドシェル12について三次元点群データの欠損がある場合、予め登録されている削岩機13及び/又はガイドシェル12の形状、寸法データに基づき、該欠損部分を補完する。
(もっと読む)
三次元変位計測方法
【課題】変位前後の計測で三次元点群データを取得することにより、多数の計測点の変位を簡易かつ省力的に測定する。
【解決手段】三次元スキャナー1により測定対象物の三次元点群データを取得する第1ステップと、前記三次元点群データに基づき測定対象物のTINモデルを作成し、これを変位前の初期TINモデルとして設定する第2ステップと、変位計測時に、三次元スキャナー1により測定対象物の変位後の三次元点群データを取得する第3ステップと、前記変位後の各三次元点群データを前記初期TINモデルに重ね合わせ、前記変位後の各三次元点群データから初期TINモデルの最も近接するTIN三角形メッシュ面に垂線を降ろし、この垂線長さを変位量としてその分布状態を把握する第4ステップとからなる。
(もっと読む)
三次元変位計測方法
【課題】変位前後の計測で三次元点群データを取得することにより、多数の計測点の変位を簡易かつ省力的に測定する。
【解決手段】三次元点群データを取得する第1ステップと、測定対象物に変位計測面3を定義するとともに、この変位計測面3上に三次元計測基準座標系A'を定義する第2ステップと、変位を計測したい方向ベクトルνを定義し、前記三次元計測基準座標系A'のZ’軸を前記方向ベクトルに一致させるように三次元変位計測座標系A"を設定し、前記三次元点群データを前記三次元変位計測座標系A"に変換する第3ステップと、前記三次元変位計測座標系A"において、X"-Y"面にメッシュを設定し、各メッシュ毎に区画内に点在するZ”座標の平均値を算出する第4ステップからなる測量を変位前後で行い、変位前後のZ”座標平均値の差分を変位量とする。
(もっと読む)
建設機械におけるブーム位置決め制御方法
【課題】ブームを作動させるサーボ機構を有しない、既存の建設機械に対して、位置決め制御機能を持たせるようにする。
【解決手段】走行可能な台車14に対し、多関節ブーム11を介して、削岩機13を搭載したガイドシェル12を支持したドリルジャンボ1における穿孔位置決め制御方法であって、ガイドシェル12の少なくとも2箇所以上に発光ダイオード8A1、8B1を設けるとともに、前記ドリルジャンボ1上の少なくとも2箇所以上に撮像装置9A、9Bを夫々設け、穿孔前に、前記ドリルジャンボ1の座標及び姿勢、前記撮像装置9A、9Bの各設置座標を既知とした状態で、前記撮像装置9A、9Bの画像G1,G2に写る発光ダイオード8A1、8B1の座標を3次元画像処理によって求めることにより、前記ガイドシェル12の位置及び方向を計測し、前記削岩機13を所定の穿孔位置まで移動させる。
(もっと読む)
11 - 20 / 22
[ Back to top ]