
株式会社渡辺機械製作所により出願された特許
1 - 4 / 4
搬送装置
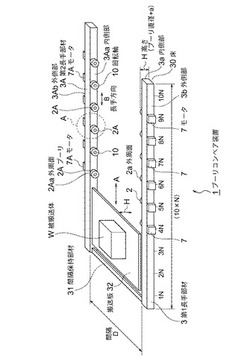
【課題】本発明は、床上に低い位置に配設されたプーリを介して搬送板によって被搬送体を搬送することを目的とする。
【解決手段】本発明による搬送装置は、床(30)上に設置された第1、第2長手部材(3,3A)に設けられ円盤状のプーリ(2,2A)を有するモータ(7,7A)と、各長手部材(3,3A)間の間隔(D)を可変的に設定するための間隔保持部材(D)と、前記各プーリ(2,2A)上に載置された搬送板(32)とを備え、各プーリ(2,2A)間に互いに空間を介して離間している構成である。
(もっと読む)
搬送用ロボット

【課題】機器間のスペースが少なくても設置することができ、且つ、製造コストを少なくすることができる搬送用ロボットを提供すること。
【解決手段】第1アーム14の基端を基部11に対して回転可能に連結すると共に、第1アーム14の先端を第2アーム16に対して回転可能に連結した。また、第1アーム14の回転軸(第1回転軸13)と、第2アーム16の回転軸(支軸15)を平行にした。そして、基部11に第1プーリ24を固定すると共に、支軸15を中心として、第2プーリ25を第2アームと一体的に回転するように固定した。さらに、第2アームの基端に、第1アーム14に対して回転しないように第3プーリ28を固定すると共に、第2回転軸32を中心として、保持部が取り付けられる第4プーリ30を第2アームの先端に回転可能に固定した。
(もっと読む)
搬送機及び洗浄装置
【課題】単純な構成でありながら、略円筒形のワークを搬送路に沿って順次搬送すると共に、ワークに対して均等に洗浄液を吹き付けることのできる搬送機及びその搬送機を用いた洗浄装置を得る。
【解決手段】スプロケット8によって駆動される搬送チェーン7のローラ12に、案内板10と当接する駆動部14と、略円柱状のワーク3を支持する支持部15とを備える。駆動部14は案内板10上を移動することによって回転し、支持部15は駆動部14の回転に追従して回転する。支持部15はワーク3の外周と当接するため、ワーク3は支持部15の回転に追従して回転する。
(もっと読む)
コンベヤ
【解決手段】搬送ローラ8,11で被搬送物17を載せて搬送する搬送面8a,11aを含む想定面Pよりも回転中心線寄りの内側領域Qにタイミングベルト16の外周面16aをその想定面Pに対向して配設するとともに、搬送ローラ8,11で被搬送物17を載せて搬送する搬送面8a,11aが回転中心線に対しなす半径R8,R11よりも、タイミングベルト16の外周面16aが回転中心線に対しなす半径R16を小さくした。そのため、搬送ローラ8,11に載せた被搬送物17とタイミングベルトプーリ9,12との間にタイミングベルト16を位置させた状態となり、タイミングベルトプーリ9,12からのタイミングベルト16の浮き上がりを規制する機能を被搬送物17が持つ。
【効果】コンベヤの駆動力伝達装置においてテンションプーリを省略することを可能にする。
(もっと読む)
1 - 4 / 4
[ Back to top ]