
エスティーミクロエレクトロニクス・エス・アール・エルにより出願された特許
1 - 2 / 2
慣性センサの使用に基づく歩数計の制御方法および、この方法を実行する歩数計
【課題】慣性センサの使用に基づく信頼性の高い歩数計の制御方法、およびその方法を実行する歩数計を提供する。
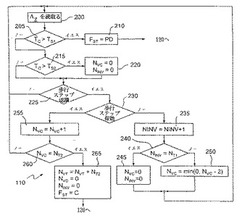
【解決手段】歩数計を制御する方法は、歩数計のユーザの動作に相関される信号(AZ)を発生し、信号(AZ)に基づいて、ユーザの歩行ステップを検出(200-225、300-320)するステップを含んでいる。さらにその方法は、検出された歩行ステップのシーケンス(K−2、K−1、K)が予め定められた規則性の条件(230、320、345)を満足するか否かをチェックし、規則性の条件(230、320、345)が満足されるならば、有効な歩行ステップの総数(NVT、265、325、350)を更新し、規則性の条件(230、320、345)が満足されないならば、有効な歩行ステップの総数(NVT)の更新を阻止するステップを考慮する。
(もっと読む)
加速度しきい値の自己適応計算のアルゴリズムを使用する歩数計装置および歩数検出方法

【課題】加速度しきい値の自己適応計算のアルゴリズムを使用する歩数計装置および歩数検出方法を提供する。
【解決手段】歩数計装置1 において、ユーザの歩行の歩行ステップを検出し、計数するために、加速度センサ2 は歩行ステップ中に発生された垂直加速度を検出する。処理装置3 は加速度センサ2 に接続され、歩行ステップの発生を検出する加速度Aに関係する加速度信号CalAccを処理し、特に加速度信号CalAccを第1の基準しきい値S+ と比較する。処理装置3 は、加速度信号CalAccの関数として第1の基準しきい値S+ を自動的に適合させる。特に処理装置3 は加速度信号の振幅のエンベロープEnv+ の関数として第1の基準しきい値S+ を変更する。
(もっと読む)
1 - 2 / 2
[ Back to top ]