
フォスター−ミラー・インクにより出願された特許
1 - 6 / 6
着用可能型オーディオケーブル管理システム
衣類上のポケットは、オーディオ再生装置を格納するために構成される。デバイスドックは、前記ポケットと関連している。前記デバイスドックは、前記オーディオ再生装置に接続可能なオーディオコネクタを含む。ジャックドックは、衣類上に存在する。前記ジャックドックは、ヘッドホンに接続するために構成されたヘッドホンジャックを含む。細長い伸縮性織物のデータ/電力バスは、前記デバイスドックと前記ジャックドックとの間で衣類と一体化される。  (もっと読む)
(もっと読む)
衝撃エネルギーアブソーバー
衝撃エネルギーアブソーバーは、ある例では、閉塞端部および開放端部を有するシリンダーと、このシリンダーの開放端部の周囲に固定されたスリーブと、シリンダー内の超高分子量ポリエチレン物質の形態の減衰物質とを含む。プランジャは、スリーブを介して、減衰物質内へと押し込まれるよう配置される。プランジャが衝撃を受けて、減衰物質内へと押し込まれるとき、減衰物質は、固体から粘性流体状態へと変化し、これによって、かなりの大きさのエネルギーの吸収を可能とする。 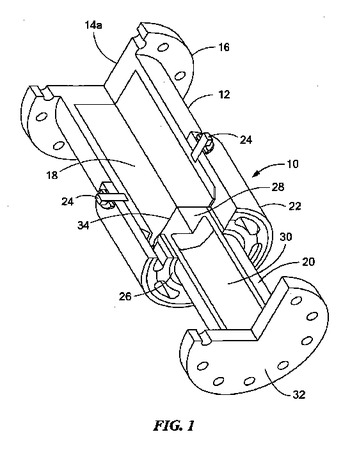 (もっと読む)
(もっと読む)
車両及び構造物シールド
車両及び構造物は、ネットサブシステムにより支持されてネットに当てる発射体に衝突するように構成されたロッド又はハードポイントの配列を含む可撓性のネットサブシステムを含む。フレームは、フレームを車両又は構造物に対して間隔を空けた関係に配置してそこに取り付けられた搭載ブラケットを含む。第1解除可能ファスナーサブシステムはネットサブシステムをフレームに解除可能に固定し、第2解除可能ファスナーサブシステムは、フレームの搭載ブラケットを車両又は構造物に解除可能に固定する。  (もっと読む)
(もっと読む)
モジュラー移動ロボット
そこに収容された電源を含むシャーシを有するモジュラー移動ロボット。右および左キャタピラモジュールは、それぞれロボットシャーシに取り外し可能に連結される。各キャタピラモジュールは、側板と、側板に対して回転可能な少なくともひとつの駆動輪と、駆動輪を駆動するためのモーターと、側板に対して回転可能な少なくともひとつのアイドラーと、駆動輪、側板、およびアイドラーの周囲に延在するキャタピラとを含む。独自の砲塔駆動サブシステムを有する砲塔アセンブリは、簡易脱着機構を介してロボットシャーシに取り外し可能に連結される。  (もっと読む)
(もっと読む)
状況認識を有する武器ロボット
遠隔制御される移動ロボットは、タレット・サブシステムと、ロボットを制御し、タレットを制御し、武器を発射するロボット制御器サブシステムと、ロボットの位置を決定するロボット・ナビゲーション・サブシステムと、タレット配向決定サブシステムと、指令を受信し、かつロボット位置データ及びタレット配向データを送信するロボット通信サブシステムと、を含む。オペレータ制御ユニット通信サブシステムは、ロボットに指令を送信し、かつロボットからロボット位置データ及びタレット配向データを受信する。オペレータ制御ユニット・ナビゲーション・サブシステムは、オペレータ制御ユニットの位置を決定する。オペレータ制御ユニット制御器サブシステムは、ロボット位置データ、タレット配向データ、及びオペレータ制御ユニットの位置に応答して、武器が所定のファン角度以内でオペレータ制御ユニットに向いているか否かを決定する。 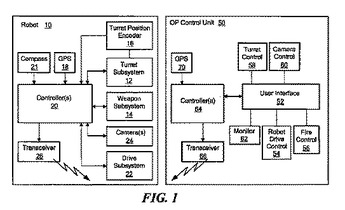 (もっと読む)
(もっと読む)
機械加工用ダイナミクス計器
【解決手段】 機械のツールに近接し、前記機械の非回転部に反応して振動信号を出力するためのセンサーと、前記センサーの出力に反応して前記振動信号のダイナミクスを特徴付ける複数の特徴的数量を計算し、前記特徴的数量を相互に関連付けて機械の動作に関連するパラメータを検出するように設定されたプロセッサとを含む機械加工用ダイナミクス計器である。  (もっと読む)
(もっと読む)
1 - 6 / 6
[ Back to top ]