
Fターム[2B063CA03]の内容
移植機(田植機の接地部) (1,596) | 連動制御 (163) | 自動昇降制御 (150) | 車輪と作業装置の連動 (2)
Fターム[2B063CA03]に分類される特許
1 - 2 / 2
田植機
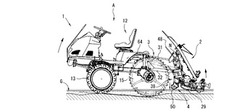
【課題】走行部が傾斜しても整地装置を適切な位置で整地作業をすることができる田植機を提供する。
【解決手段】
走行部の後方に植付部を昇降自在に連結し、同植付部の前方に整地装置を昇降自在に取り付けた田植機において、走行部の前後方向の傾斜角度を検出する傾斜角度検出手段と、植付部の植付深さ位置を検出する植付深さ位置検出手段と、両検出手段の検出結果に基づいて整地装置の整地高さを算出補正する制御部と、同制御部により制御されて整地装置を昇降させる昇降用アクチュエータとを具備するようにしている。
(もっと読む)
自動旋回制御式苗移植機

【課題】圃場の往復植付け走行時は自動旋回制御によりオペレータの手を煩わすことなく植付装置が稼動制御されるとともに、周回植付け走行時は植付装置により植付け動作を確実に継続することが可能となる自動旋回制御式苗移植機を提供する。
【解決手段】自動旋回制御式苗移植機は、操舵操作により圃場の旋回走行が可能な機体と、稼動指令により苗移植動作する植付装置(7)と、稼動指令により圃場面を整地動作するな整地装置(16)と、機体の旋回操作と連動して植付装置(7)を稼動制御する自動旋回制御部(21)とを備えて構成され、上記自動旋回制御部(21)による植付装置(7)の稼動制御の適用は、上記整地装置(16)の稼動停止を条件として制御構成したものである。
(もっと読む)
1 - 2 / 2
[ Back to top ]